有限快拍下的小尺度矢量阵DOA算法*
2012-12-01何光进程锦房
何光进 程锦房 张 炜 吴 昊
(海军工程大学兵器工程系1) 武汉 430033) (镇江船艇学院船艇工程系2) 镇江 212003)
0 引 言
声源波达方向(DOA)估计是水下被动声纳系统的重要研究内容.近几十年来,涌现的各种高分辨方位估计算法,如旋转不变子空间法(ESPRIT)[1-3]和多重信号分类法(MUSIC)[4-5]等,从理论上克服了角度分辨的瑞利准则,获得了超过常规方法的角度分辨能力.其中ESPRIT算法将接收传感器阵列分成2个完全相同的子阵列,利用数据协方差矩阵信号子空间的旋转不变特性来估计信号参数[6],与 MUSIC算法相比,ESPRIT算法不需要进行谱峰搜索[7],直接通过数值求解得到目标信号的DOA估计,计算复杂度较小,适用于计算能力弱、实时性要求高的场合.
矢量水听器能够同时共点拾取声场中的声压和三路相互正交的振速信息,它一出现引起了国内外的广泛关注[8-10],由于单个水听器已经包含目标的方位信息,在相同的阵元数目下,声矢量阵能获得更高的增益和空间分辨能力,使得水声基阵走向小型化成为可能.国内外学者对矢量传感器和高分辨率方位估计算法的结合进行了研究,取得了一定的成果[11-12].但是存在的问题是没有充分利用观测数据的共轭信息,当阵元数和快拍数较少时,DOA估计精度和多目标分辨能力较弱.本文提出了一种改进的ESPRIT算法,利用水听器阵列输出的数据及其共轭构造一中心Hermitian矩阵,根据酉变换对其进行实数化处理.与常规算法不同,本算法不计算数据的协方差矩阵,而是直接对实值矩阵进行奇异值分解(SVD)或特征值分解(EVD),得到信号子空间,最后根据实数域内的ESPRIT算法求得目标信号的DOA估计.与常规算法相比,改进算法利用了观测数据的共轭信息,DOA估计精度和多目标分辨能力均有提高,由于将对复数矩阵的操作转化到实数域内进行,虽然处理的数据量增加了一倍,但整个算法的运算量并没有增加,适用于小尺度阵、有限快拍下的目标信号DOA估计.
1 信号模型
假设平面内有K个远场窄带声源si,i=1,2,…,K,以角度θi∈[-π,π]入射到 M(K<M)元二维矢量水听器均匀线阵上,阵元间距为d,且满足:d≤λmin/2,其中λmin为窄带声源的最小波长.令单矢量水听器对第i个声源的方向矢量为hi=[1,cosθi,sinθi]T,以左边的第1个水听器为参考阵元,则第k个阵元的输出为
式中:λi为第i个声源的中心波长;nk=[nkp,nkvx,nkvy]T为第k个阵元的噪声向量,假设为独立、加性高斯白噪声;ak(θi)为阵元k对第i个声源的声压响应系数,整个阵列对第i个声源的声压响应为

式中:φi=2πd sinθi/λi为第i个声源在相邻阵元间的相位延迟.
将各阵元的输出组合,可得整个阵列的输出为

式中:⊗为直积(Kronecker积);S=(s1,s2,…,sK)为声源的波前矢量;n=[n1,n2,…,nM]为相互独立的加性高斯白噪声;A=(a(θ1)⊗h1,a(θ2)⊗h2,…,a(θK)⊗hK)为矢量阵的阵列流形.
2 常规ESPRIT算法
ESPRIT算法将传感器阵分成2个完全相同的子阵,且两子阵的阵间距已知.子阵的划分方式有多种,本文选取有最大阵元数重叠划分方式,即将矢量阵的前M-1个阵元作为子阵1,后M-1个阵元为子阵2,两子阵的阵列流形分别为:A1和A2,则两子阵间存在如下关系

式中:Φ=diag(ejφ1,ejφ2,…,ejφK)为两子阵间的旋转矩阵.则两子阵的输出数据矩阵为

数据的协方差矩阵为

式中:In=diag(1,1/2,1/2,…,1,1/2,1/2)为矢量传感器阵的归一化噪声协方差矩阵.对R进行SVD/EVD分解,得

式中:Σs为K 个较大特征值组成的对角阵;Σn为3 M-K个较小特征值组成的对角阵;Us和Un为对应的特性向量组成的矩阵.由子空间分解的理论知Us的列向量和阵列流形A的列向量张成相同的空间,即存在一非奇异矩阵T满足

根据2个子阵的维数对信号子空间Us作如下分解

则由式(9)可以得到

从而根据最小二乘法求得ψ

由式(10)知ψ和对角阵Φ是相似的,对ψ进行EVD分解可以得到旋转矩阵Φ,根据Φ=diag(ejφ1,ejφ2,…,ejφK)和φi=2πd sinθi/λi即可求得目标信号的入射角θi.
3 改进ESPRIT算法
利用观测数据XV的共轭X*V及转换矩阵J构造如下矩阵Z

式中:“*”为取共轭;J为次对角线元素为1的方阵.
当3 M分别为偶数和奇数时,分别定义左实转换矩阵Q[13-14]如下

式中:I为单位对角阵.
易知Z满足中心Hermitian对称条件,即:TX=Q2L是实数,对TX进行SVD分解有

上式说明TX的信号子空间为Es=QH3MUs.定义如下的转换矩阵:K2=[0,IM-1](M-1)×M⊗I3,则实值空间的旋转不变性有如下关系

式中:H1=2Re1),H2=2Im.对ψ′进行EVD分解有

式中:Ω=diag(tan(φi/2)),结合φi=2πd sinθi/λi即可求出信号的入射角,此处不再详述.
4 改进算法的计算量分析
与常规ESPRIT算法相比,改进算法不同的部分是:(1)对中心Hermitian对称矩阵Z进行实值化转换,文献[15]指出此实值化转换过程需要3 M×2 N 次加法运算;(2)对实值矩阵TX进行SVD/EVD分解,完成每次SVD/EVD操作所需的乘法运算为O((3 M)3).对相同维数的实数矩阵和复数矩阵进行操作,前者的运算量是后者的1/4.通过比较可以得出改进算法的计算复杂度比常规算法有较大降低.
设TX的协方差矩阵为RTX,由前面的分析易知TX的维数为3 M×2 N,RTX的维数为3 M×3 M,当快拍数N满足:N≤3 M/2时,本文提出的方法比协方差方法有更小的计算量,在小快拍下有较好的应用前景.
5 仿真实验
5.1 改进算法的DOA估计精度
矢量水听器阵元数M=5,子阵划分选用最大重叠的方式,声源的入射角度θ=30°,频率为1 000 Hz,阵元间距取半波长,快拍数N=8,Monte Carlo仿真次数为200.不同信噪比下改进算法和常规算法对目标DOA估计的均方误差曲线见图1.由图可见,本文提出的改进算法与常规ESPRIT算法相比提高了目标的DOA估计精度.
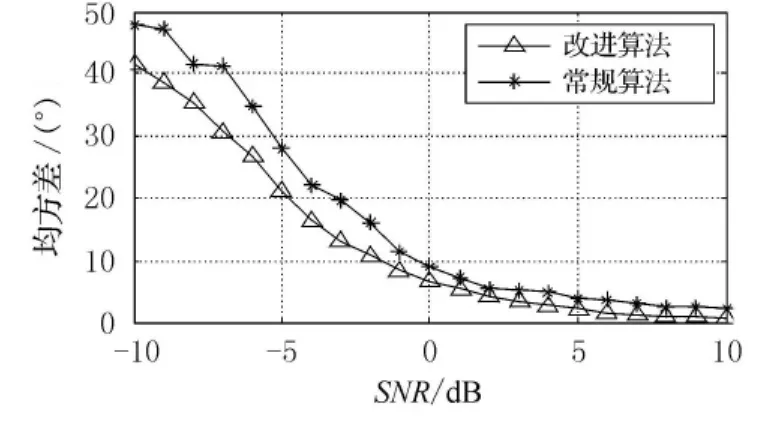
图1 改进算法的DOA估计精度(N=8)
5.2 改进算法性能与快拍数的关系
本仿真用于分析改进算法的DOA估计精度与快拍数N的关系,仿真条件同上,结果如图2所示,快拍数N=8的仿真结果见图1.从2图中可以看出,改进算法和常规算法法的方位估计精度均随快拍数的增加而增加,但是,改进算法的方位估计精度优于常规ESPRIT算法.图3更清晰地给出了信噪比为0 dB时改进算法和常规算法DOA估计均方误差与快拍数的关系,从图中看出,在小快拍时改进算法明显优于常规算法.

图2 改进算法的DOA估计精度(N=2)

图3 DOA均方误差与快拍数的关系
5.3 改进算法的双目标分辨能力
下面对改进算法的双目标分辨能力进行分析.两声源的入射角度分别为10°和-10°,频率分别为f1=1 000 Hz,f2=800 Hz,矢量阵阵元数为7,阵元间距d=λ1/2=0.75 m,快拍数N=16.不同信噪比下改进算法和常规算法对双目标的DOA结果估计如图4所示.从图中可以看出,改进算法在0 dB时已能有效地分辨出双目标,而常规算法在10 dB时才能达到相近的分辨能力,且改进算法估计结果的离散性更小,稳定性较好.图5给出了在不同信噪比下,改进算法和常规算法对双目标分辨的成功概率,从图中可以更直观地看出改进算法的优越性.

a)改进算法
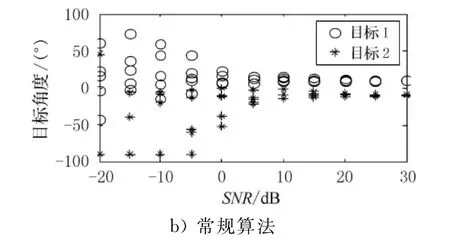
图4 改进算法的双目标DOA估计结果
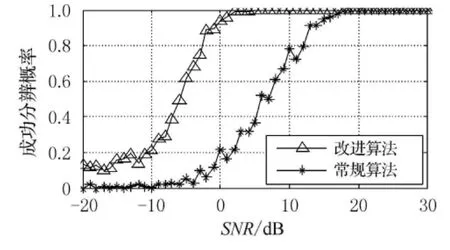
图5 改进算法的双目标DOA估计结果
5.4 改进算法的分辨能力与阵元数的关系
图5 给出了在阵元数为7时改进算法和常规算法的双目标分辨能力,下面分析阵元数更少时两种算法的性能.图6给出了阵元数为5、快拍数为16时两种算法的双目标分辨能力曲线,从图中可以看出,在此条件下常规算法已不能分辨双目标,而改进算法在SNR>10 dB时仍有较好的分辨效果,适用于水下小尺度阵近距离目标定位与识别.

图6 小尺度阵条件下改进算法的双目标分辨能力
6 结 论
本文将矢量传感器阵列技术和超分辨率方位估计算法相结合,提出了一种适用于有限快拍的小尺度矢量水听器阵的方位估计算法,通过仿真分析,得出以下结论:
1)通过酉变换原理将对矩阵的操作从复数域转换至实数域内进行,大大减少了计算量,增强了算法的实时性.
2)改进算法对矢量阵的阵元数目有更高的宽容性,在阵元数目较少时可以通过牺牲信噪比来提高对多目标的分辨能力.
3)改进算法利用了矢量阵观测数据的共轭信息,对单目标的DOA估计精度和多目标的分辨能力均有提高.
[1] Tayem N, Kwon H M.Conjugate ESPRIT(C-SPRIT)[J].IEEE Trans.Antennas Propag.,2004,52(10):2 618-2 624.
[2]Roy R H,Kailath T.ESPRIT-Estimation of signal parameters via rotational invariance techniques[J].IEEE Transactions on Acoustic,Speech,Signal Processing,1989,ASSP-37(7):84-95.
[3]张揽月,杨德森.矢量阵的非空间ESPRIT算法[J].哈尔滨工程大学学报,2009,30(4):406-410.
[4]何希盈,程锦房.矢量水听器阵列矩阵空域预滤波MUSIC算法[J].华中科技大学学报:自然科学版,2011,39(3):71-74.
[5]Schmidt R O.Multiple emitter location and signal parameter estimation[J].IEEE Trans.on AP,1986,34(3):276-280.
[6]王永良,陈 辉,彭应宁,等.空间谱估计理论与方法[M].北京:清华大学出版社,2004.
[7]王 伟.ESPRIT方法在矢量水听器多目标方位估计中的应用[J].声学与电子工程,2006(3):19-23.
[8]陈新华.矢量传感器阵列信号处理[D].哈尔滨:哈尔滨工程大学水声技术国防科技重点实验室,2004.
[9]Hawkes M,Nehorai A.Wideband source localization using a distributed acoustic vector sensor array[J].IEEE Trans on Signal Processing,2003,51(3):1 479-1 491.
[10]姚直象,惠俊英,惠 娟.基于自适应算法的单矢量传感器抗相干干扰[J].武汉理工大学学报:交通科学与工程版,2008,32(1):138-141.
[11]Wong K T,Zoltowski M D.High accuracy 2D estimation with extended aperture vector sensor arrays[J].IEEE Trans on Antennas and Propagation,1996,45(3):2 789-2 792.
[12]Wong K T ,Zoltowski M D.Root-MUSIC-based azimuth-elevation angle-of-arrival estimation with uniformly spaced but arbitrarily oriented velocity hydrophones [J].IEEE Trans Signal Processing,1999,47(12):3 250-3 260.
[13]Keh C H,Chien C Y.A unitary transformation method for Angle-of-Arrival estimation[J].IEEE Trans on Signal Processing,1991,39(4):975-977.
[14]Haardt M,Alex B G.A new unitary esprit based technique for direction finding[J].IEEE Trans.on Acoustics,Speech,Signal Processing,1999,5(3):2 837-2 840.
[15]Haardt M,Josef A N.Unitary ESPRIT:how to obtain increased estimation accuracy with a reduced computational burden[J].IEEE Trans on Signal Processing,1995,43(5):1 232-1 242.
