高压断路器无刷直流电机机构模糊控制系统仿真分析*
2012-11-24刘爱民张红奎赵前程
刘爱民,张红奎,赵前程,黄 旭
(沈阳工业大学电气工程学院,沈阳 110870)
0 引言
近年来,随着智能电网技术的迅猛发展,对电器设备的安全性和可靠性要求越来越高,断路器作为电力系统的重要开关设备其智能化操作已是当今研究的热点。在不同工作情况下,高压断路器触头的速度特性有很大差别。触头能否按理想曲线动作取决于操作机构的特性。传统的操作机构采用弹簧、气动和液压等技术,连杆多、结构复杂、累计公差大难以实现断路器分/合闸操作的可靠控制[1]。
电力电子技术的日臻成熟和电机机构应用到高压电器领域,为高压断路器按理想曲线操作提供了可能。电机机构通过电机带动绝缘拉杆进而驱动断路器触头动作,完成分/合闸操作,运动部件少、结构简单、动作分散小。采用先进的控制算法对电机机构动作进行精确控制,不仅可以使断路器按理想速度特性曲线操作,还可以降低操作时产生的机械振动和噪音。
本文针对断路器的操作要求,建立了高压断路器无刷直流电机机构控制系统的仿真模型。在详细分析电机机构和模糊控制原理的基础上,并对高压断路器分/合闸过程进行仿真分析。与常规PID控制方法相比,模糊自适应PID控制不但实现了电机机构运动的可靠控制,还大大提高了控制精度[2-3]。
1 无刷直流电机机构
1.1 无刷直流电机机构
无刷直流电机机构是由一台配有制动装置的有限转角永磁无刷直流电机直接驱动传动机构带动断路器分/合闸操作[4]。电机通过法兰、传动机构与断路器转轴连接,电机机构与断路器之间的传动机构由转轴、拐臂、触头弹簧、绝缘拉杆和三角拐臂组成的一套四连杆机构(如图1所示)。
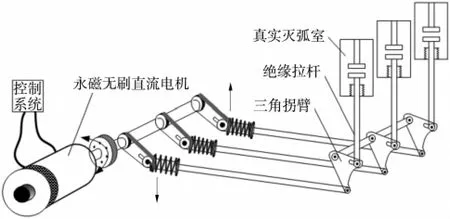
图1 高压断路器永磁无刷直流电机机构的结构简图
1.2 无刷直流电机机构理想运动曲线
根据40.5kV高压断路器分/合闸运动特性,规划无刷直流电机机构理想动作曲线(如图2所示)。设分闸时间为0.016s,则最大速度可达2.45m/s,速度特性为:快~更快~慢~停止;合闸时间为0.02s,则速度最大值为2m/s,速度特性要求为:零~低速~高速~零,操作曲线应平滑,不出现明显拐点。

图2 无刷直流电机机构分/合闸操作速度——时间规划曲线
2 模糊控制的基本原理
2.1 模糊控制的数学基础
模糊集合理论是经典集合理论的扩展,在模糊集合理论中,一个元素既能部分地属于一个模糊集合,又可以部分地属于另一个模糊集合。由于模糊集合没有明确的边界,只能用隶属函数来表示一个元素属于一个集合的程度。具体定义如下:
设给定论域U,μA为U到封闭区间[0,1]的任一映射:

可以确定U的一个模糊集合A,μA称为模糊集合A的隶属函数。模糊集合和它的隶属函数一一对应,模糊集的运算可通过隶属函描述。
模糊关系描述元素之间关联的程度,把普通集合关系的定义推广到模糊集合中,便可得到模糊关系的定义,设两个论域A和B,由A和B的直积可以得新论域A×B,A和B的模糊关系R就是定义在直积A×B上的一个模糊集合,它把论域上的每个元素(a,b)映射为0与1之间的隶属度,即

式中隶属度μR(a,b)表示序偶(a,b)具有关联R的程度,当A=B时,R称为A上的模糊关系。
2.2 模糊控制的基本原理
模糊控制系统(如图3所示)的核心部分为模糊控制器,控制规则由软件程序实现。计算机通过中断采样获取被控量的精确值,然后与给定值比较得到误差信号E作为模糊控制器的一个输入量,把误差信号E进行模糊化变成模糊量。将模糊量用模糊语言表示,得到误差信号E的模糊语言集合的一个子集e,再由e和模糊控制规则R根据推理的合成规则进行模糊决策,得到模糊控制量u,即

的u为一个模糊量。
为了对被控对象施加精确控制,还需要将模糊量u清晰化转换为清晰量。数字控制量经数模变换变为模拟量,送给执行机构,从而实现对被控对象的精确控制[5]。
3 高压断路器无刷直流电机机构控制系统建模
在MATLAB的Simulink的仿真环境下,采用模块化方法将整个系统分成几个功能模块分别进行建模,通过这些模块的有机组合,建立整个系统的仿真模型(如图4所示)。其中电机模块实现其内部各项参数的计算;换相模块检测电机转子位置,为IGBT的通/断提供驱动信号;可控电压源和IGBT组成能量供应和调节模块,为电机动作提供能量;速度环、转矩环和位置环实现对被控量的实时调节[6-7]。
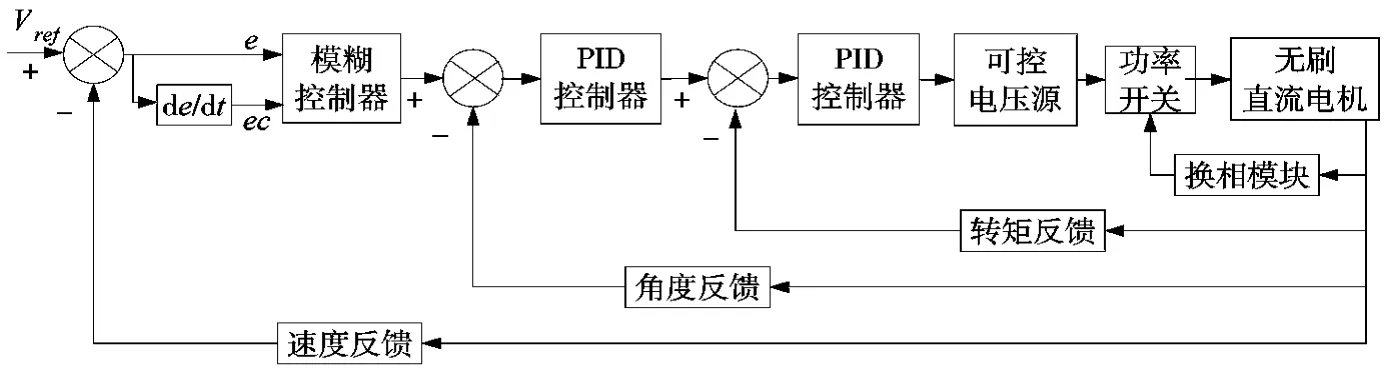
图4 高压断路器无刷直流电机控制系统仿真图
3.1 换相控制模块
在仿真系统中,位置的判断通过函数的形式产生一定频率的方波信号。根据霍尔信号与开关管之间的逻辑关系,可以得到电机旋转不同位置时对应的驱动信号状态(如表1所示)。其中,数字0表示低电平,数字1表示高电平。

表1 霍尔信号与换相的对应关系
根据表1得出开关管的驱动信号与霍尔元件输出信号之间逻辑的关系,建立无刷直流电机换相逻辑的仿真模型(如图5所示)。
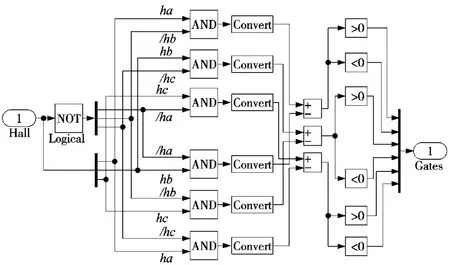
图5 无刷直流电机换相逻辑模型
3.2 模糊自适应PID控制器
要提高模糊控制器的精度和跟踪性能,控制量应选择多种语言变量,分档越细性能越好。但缺点是规则数和计算量大大增加,从而使调试更加困难,控制器的实时性也难以满足要求。所以本文采用模糊和自适应PID混合控制策略(如图6所示),即保留了模糊控制器快速响应的特点,同时系统稳定性也得到很大的提高。
转速环以速度误差e和误差变化率ec作为输入,系数KP、KI、KD作为输出构造二维模糊控制器。e和ec经模糊化处理得到模糊语言变量E和Ec。E和Ec的模糊子集均为 {NB,NM,NS,Z,PS,PM,PB}。同样,输出量 KP、KI、KD的模糊子集均为{NB,NM,NS,Z,PS,PM,PB}。选取变量 E、Ec以及 KP、KI、KD的论域均{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},并设E、Ec服从高斯型隶属函数曲线分布,KP、KI、KD服从三角型隶属函数曲线分布。为了得到较好的稳态性能,对偏差E进行不规则划分使得在E为零附近有较高的灵敏度,保证系统达到较高的稳态控制精度。输入量的隶属度函数如图7所示。
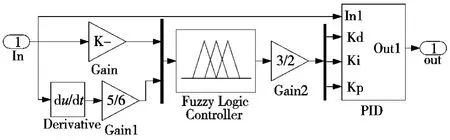
图6 模糊自适应PID控制的速度环
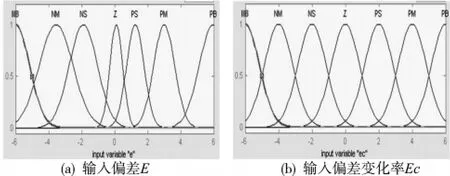
图7 输入隶属度函数
为了便于观察输入量与输出量的关系,在GUI中建立空间曲面,把整个论域上各个输入量与输出量间的函数关系表示出来(如图8所示)。从图可见,输出曲面光滑,表明输出函数连续性很好。

图8 输入量和输出量曲面观测窗
模糊控制规则是专家的经验和操作者的技能加以总结而得出的模糊条件语句的集合。本模型的模糊规则可用以下49条模糊条件语句来描述:
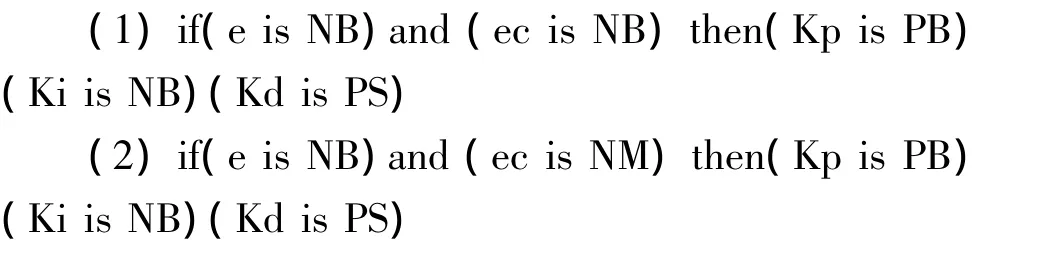

根据上面的模糊规则进行精确化计算,把语言表达的模糊量回到精确数值,也就是根据输出模糊子集的隶属度和比例因子计算出输出量的精确值。
4 高压断路器无刷直流电机机构控制系统仿真分析
控制系统仿真图如图9所示,采用速度、位置和转矩三闭环控制。内环为转矩环和位置环,采用传统PID控制;外环为速度环,采用常规PID控制和模糊自适应PID控制两种策略,并进行对比分析。将理想操作曲线与实际曲线比较,得到误差信号,经过外环的速度调节,速度环输出作为位置环的输入,转矩环以位置环的输出作为输入,调节后的输出信号给可控电压源提供控制信号,通过改变IGBT模块母线电压,实现对电机机构速度的调节。用模糊自适应PID控制的分闸操作仿真曲线,速度曲线基本与给定曲线重合,达到了较好的跟踪效果。图11为合闸操作仿真曲线,与分闸类似,常规PID控制仿真曲线误差较大,尤其是前期波动较大,而模糊自适应PID控制可以实时调节系统参数,克服输入量的变化所引起的偏差,速度跟踪曲线与给定曲线基本一致,体现了智能控制算法的优越性。
5 结束语
本文对高压断路器无刷直流电机机构控制系统进行建模和仿真分析,模糊自适应PID控制器克服参数选取的影响,提高速度跟踪的可靠性和精度。通过与传统PID控制器的仿真结果比较,证明了模糊自适应PID控制器更适合高压断路器无刷直流电机机构的速度跟踪控制。
电机机构应用到高压电器领域有利于智能电器技术的发展和智能电网的建设。本文的研究成果为实现电机机构控制系统的设计和速度跟踪控制提供了参考依据。笔者将通过相应实验数据进一步证明
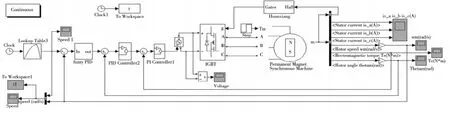
图9 高压断路器无刷直流电机控制系统仿真图
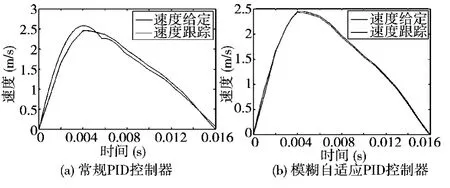
图10 高压断路器无刷直流电机机构分闸操作速度跟踪曲线

图11 高压断路器无刷直流电机机构合闸操作速度跟踪曲线
通过对系统进行仿真,得到的分/合闸操作速度跟踪曲线如图10、11所示,分闸操作持续16ms,合闸操作用时20ms,满足断路器操作时间要求。图10a为采用常规PID控制分闸操作仿真曲线,分闸操作前期速度上升较大,跟踪曲线有些偏差,图10b为采本文研究的模型和仿真结果的有效性,相关研究成果在后续论文中体现。
[1]林莘.现代高压电器技术[M].北京:机械工业出版社,2002.
[2]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008.
[3]刘爱民,林莘.断路器操动机构用圆筒型直线感应电动机控制系统研究[J].中国电机工程学报,2009,29(27):112-118.
[4]李永祥,林莘,徐建源.高压断路器永磁无刷直流电机操动机构的设计及动态仿真[J].电网技术,2010,34(1):185-189.
[5]纪志成,沈艳霞,薛花.无刷直流电机自适应模糊控制的研究[J]. 中国电机工程学报,2005,25(5):104-109.
[6]林莘,王德顺,徐建源.高压断路器直线伺服电机操动机构及控制技术研究[J].中国电机工程学报,2008,28(27):137-141.
[7]张忠蕾,李庆民,娄杰.电力电子控制电动机操动机构分闸运动特性的仿真分析[J].电网技术,2006,30(18):58-63.