基于蓝牙串口模块的小型六足机器人系统设计
2012-11-22孟凯,李鑫
孟 凯,李 鑫
(河南工程学院 机械工程系,河南 郑州 451191)
六足机器人与轮式机器人和履带式机器人相比有着显著的特点,它六足行走,运动稳定性突出,环境适应性好,能适应复杂多变的地形,在抢险、侦查、探测等领域有着较为广泛的应用[1-3].本研究结合蓝牙模块、Mini USB 32舵机控制器等模块化器件,提出了一个便于编程和调试的低成本小型六足机器人系统.
1 机械结构系统设计
由仿生学研究可知,六足机器人的单足设计2个自由度就能实现所需的运动要求,每个足设置2个关节.水平关节用于在水平方向上摆动腿以实现迈步,并可以调整运动过程中机器人的重心位置,使运动稳定.竖直关节用于在竖直方向上摆动腿,使其与地形相适应,主要影响机器人的重心高度,它与跟关节协调运动,可以实现一定范围内的避障功能.
六足机器人每足设计2个自由度,竖直方向1个自由度,水平方向1个自由度,足上设计了2个舵机,分别连接在2个平行臂上.平行臂分别与支腿相连,在腿部加入四连杆机构,使足部运动更协调稳定,如图1所示.根据足部设计结构,选用矩形底盘,机械结构如图2所示.
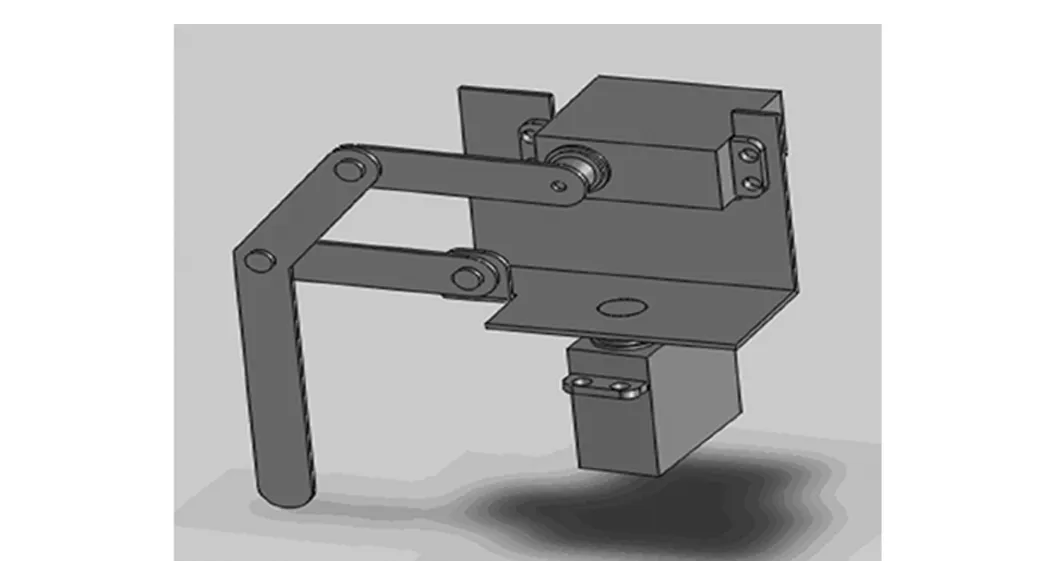
图1 足关节结构Fig.1 A joint of foot structure

图2 总体结构Fig.2 Overall structure
2 舵机选型与执行控制器的选择
2.1 舵机选型
舵机性能的好坏直接影响到六足机器人的整体性能,机器人的负载能力、运动精度和可靠性等都取决于舵机的性能.本次设计的六足机器人对控制精度的要求不高,如果选用控制精度较高的进口舵机则成本太高.六足机器人在运动过程中最少三足作用于地面,舵机需要承受较大的扭力,而国产的TowerPro—MG995型舵机的性价比较高,并且堵转扭矩为13.0 kg·cm(6.0V).考虑到经济因素,最终选择 TowerPro—MG995 型舵机作为关节驱动元,舵机参数见表1.

表1[4] TowerPro—MG995参数表Tab.1 TowerPro—MG995 parameter table
舵机的控制信号是PWM信号,利用占空比的变化改变伺服电机的位置.舵机的瞬时运动速度是由其内部的直流马达和变速齿轮组的配合决定的,在恒定的电压驱动下,其数值唯一,但其平均运动速度可以通过分段停顿的控制方式来改变.例如,我们可把动作幅度为90°的转动细分为128个停顿点,通过控制每个停顿点时间的长短来实现从0°到90°变化的平均速度.
由于六足机器人所要控制的舵机数多达12个,用单片机来产生PWM控制信号并控制单位时间内发送到舵机控制端的脉冲个数,所要编写的程序较为复杂,调试起来也较为繁琐.为了提高控制精度与编程效率,可采用舵机控制器来产生控制舵机的PWM信号.这种控制方式可以实现多个伺服电机的协调优化控制,程序设计者可以把富余的精力用来研究机器人的动作设计与运动规划.
2.2 执行控制器选择
本次采用的是Mini USB 32微型舵机控制器,它是一款功能强、体积小的微型舵机控制器,有着较高的位置控制精度及运动控制精度.它不但可以实现单个舵机的速度与位置控制,还可以通过单个字符控制多个舵机的协调运动,结构见图3.
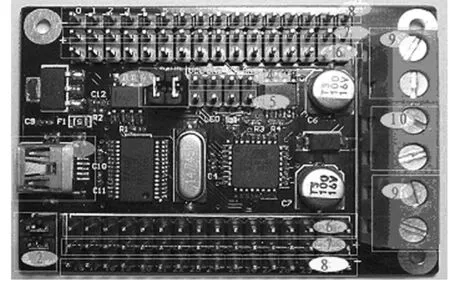
1. Mini USB接口; 2.TTL串口跳线; 3.比特率设置;4.对外5 V供电接口; 5.4路输入接口; 6.舵机信号接口;7.舵机电源正极; 8.舵机电源负极; 9.舵机供电;10.控制板电源(7~12 V)
3 蓝牙串口模块的选用
串口通讯一般选用有线连接,例如常用的RS232与RS485都是利用双绞线连接上位机与下位机的通讯端口,按位发送接收数据.但是,对于六足机器人的调试和在线控制来说,机器人在运动过程中必须拖着较长的通讯线,这不但限制了六足机器人的动作幅度,也给调试带来了不便.
蓝牙技术是一种短距离无线通讯技术,能在电脑与外部设备之间进行无线信息交换.它支持点对点及点对多点通信,工作在全球通用的2.4 GHz ISM频段,数据速率为1 Mbps,采用时分双工传输方案实现全双工传输.
图4 BTM-1蓝牙串口模块Fig.4 BTM-1 bluetooth serial interface module
蓝牙串口模块结合了蓝牙技术与串口通讯的优点,数据的传输采用蓝牙技术,在上位机的程序开发过程中直接调用虚拟串口就能实现数据的无线通信.利用蓝牙串口模块,能够简化电脑与六足机器人之间的通信,使在线调试和控制变得更加便捷,机器人的运动灵活性也得到了加强.与单片机控制的六足机器人相比,采用蓝牙通讯的机器人,人与机器人的互动性得到了加强.图4为所采用的蓝牙串口模块BTM-01.
4 上位机控制程序设计
本次设计的控制系统的核心思想是,利用VB6.0的MSComm控件发送控制字符到虚拟串口,通过蓝牙适配器把控制字节传递到蓝牙接收模块,Min USB 32舵机控制器根据蓝牙模块转换后的控制字节驱动舵机完成相应的动作.程序结构框图见图5,程序界面见图6.

图5 上位机程序结构框图Fig.5 PC control procedure flow diagram

图6 控制程序界面Fig.6 Control program interface
Mini USB 32的控制字符必须以回车键(ASCⅡ13)字符作为一个连贯的命令输入,在没有收到ASCⅡ13字符时,Mini USB 32接收到的指令不会被执行.Mini USB 32的所有命令数据必须是ASCⅡ的字符串,同时它对ASCⅡ的格式不敏感,可以根据需要使用其他字符如空格、换行等,以增加控制程序的可读性.
控制字符格式:
#
例如:#5 P1600 #10 P750 T2500
在上位机程序的执行过程中,只需要把控制字符发送到串口的发送缓冲区即可实现控制动作.如要实现六足机器人从直立到向前爬行的状态,VB程序如下:
Case 1
MSComm1. PortOpen = True
MSComm1.Output = "#16P1700 #0P1300 #18P1350 #2P1900 #20P1250 #4P1750 #22P1100 #6P1600 #24P700 #8P2300 #26P1400 #10P2100 T1000" & vbCr
Case 2
MSComm1.Output = "#16P2000 #0P1300 #18P1350 #2P1900 #20P1250 #4P1500 #22P1100 #6P1600 #24P1000 #8P2300 #26P1400 #10P2100 T1000" & vbCr
Case 3
MSComm1.Output = "#16P2000 #0P1300 #18P1350 #2P1630 #20P1250 #4P1500 #22P1400 #6P1600 #24P1000 #8P2300 #26P1400 #10P1610 T1000" & vbCr
Case 4
MSComm1.Output = "#16P1700 #0P1300 #18P1100 #2P1630 #20P1250 #4P1750 #22P1400 #6P1900 #24P700 #8P2300 #26P1100 #10P1610 T1000" & vbCr
Case 5
MSComm1.Output = "#16P1700 #0P1000 #18P1100 #2P1630 #20P1500 #4P1750 #22P1400 #6P1900 #24P700 #8P2000 #26P1100 #10P1610 T1000" & vbCr
Case 6
MSComm1.Output = "#16P1700 #0P1000 #18P1350 #2P1630 #20P1500 #4P1750 #22P1400 #6P1600 #24P700 #8P2000 #26P1400 #10P1610 T1000 " & vbCr
(舵机端口号定义:#16为左前腿旋转,#18为左前腿上下,#20为左中腿旋转,#22为左中腿上下,#24为左后腿旋转,#26为左后腿上下,#0为右前腿旋转,#2为右前腿上下,#4为右中腿旋转,#6为右中腿上下,#8为右后腿旋转,#10为右后腿上下.)
5 结论
以上所设计的六足机器人系统实现了人与机器人系统的互动,蓝牙串口模块的应用给程序的调试和动作的设计带来了较大的便利.Mini USB 32舵机控制器的使用,使得控制程序的编写不再复杂,使设计者的精力可主要集中于机器人动作的设计与轨迹优化方面,模块化的设计也给整个系统带来了较高的稳定性和可扩展性.
参考文献:
[1] 徐鲤鸿,党皓,陈伟海,等.一种六足步行机器人的自由步态算法[J].微计算机信息,2008(5):200-202.
[2] Yang J M. Tripod gaits for fault tolerance of hexapod walking machines with a locked joint failure[J].Robotics and Autonomous Systems,2005(5):180-189.
[3] 叶献伟,陈樊,高建华.六足仿生机器人越障步态方法研究[J].浙江理工大学学报,2008,25(5):215-216.
[4] 孟凯,何庆中,张瑞洋.小型仿人机器人系统的设计[J].机械工程师,2008(10):58-60.
