基于蛇怪蜥蜴踏水机理的水面推进技术研究
2012-11-20白向华吕建刚赵志宁
白向华,吕建刚,高 飞,赵志宁
(1.军械工程学院,石家庄 050003;2.总参炮兵训练基地,河北 宣化 075100)
0 引 言
目前,世界现役两栖车辆水上推进速度一般低于15km/h,主要原因为现役两栖车辆均为排水型,排水型车辆航速接近15km/h时,会出现“阻力墙”现象,导致水阻力急剧增大,如图1所示[1]。即使大幅度提高发动机输出功率,水上推进速度也很难进一步提升[1-2]。因此,如何减小水面阻力是提高两栖车辆航速的重要途径。
国内有关减阻文献[3-7]主要从改变两栖车辆形状,如添加前后防浪板、车轮悬挂、改变车首角度等方式减少航行阻力,但车辆整体上还处于排水状态,“阻力墙”现象仍旧无法克服。
美军新一代EFV 远征战车水上最大航速达到46.6km/h,是传统两栖车辆航速的3 倍多[8]。究其原因为:EFV 远征战车水上行驶时将会变成一个大型冲浪滑板,加上超大功率的喷水推进器,使车体完全进入滑行航态,从而越过“阻力墙”,大大减小水阻力,实现高速航行,如图2[1]。

图1 不同航态两栖车辆的阻力曲线比较Fig.1 Resistance curves comparison of amphibious vehicle on different sailing status
由此可见,改变两栖车体水中航态,使其由排水状态经过渡状态、最终进入高速滑行状态(如图1所示),是解决目前两栖车辆因" 阻力墙" 而航速过低的有效方法。
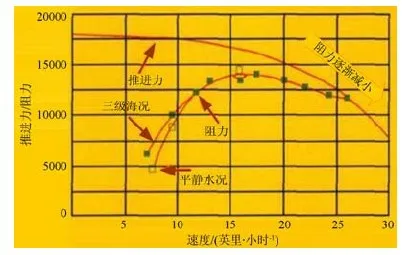
图2 EFV 流体阻力-速度曲线Fig.2 Liquid resistance-velocity curves of EFV
1 推进技术研究
1.1 滑行航态分析
根据航行原理,水面航行船(车)体的运动状态划分主要取决升力相对于排水量的大小。当车辆航速的体积弗劳德数Fr>3.0时称为滑行状态,在这种状态下航行时,车体几乎离开水面,浮力很小,其重量的90%与流体动力作用相平衡[9]。满足近似式

式中:m为车体质量,Rg为流体动力产生的升力。
此状态下,车体被高速航行产生的水动力托出水面,水阻力保持在一个稳定状态,如图1所示。除非具有专门的车体外形(如EFV 滑板型车底,图3 所示)和超大功率发动机,可以实现水上高速滑行状态(图4所示);否则,对于传统排水型车辆(图5所示)很难实现这种水上高速滑行状态。
1.2 仿生分析

图3 EFV 滑板型车底Fig.3 Smooth-board shape of EFV bottom

图4 EFV 托出水面高速滑行状态Fig.4 High speed sliding status above water of EFV

图5 传统排水型两栖车辆水中航行状态Fig.5 Sailing status in water of traditional drainage amphibious vehicle
现代仿生技术为突破传统排水型车辆的“阻力墙”现象带来灵感和希望。美洲热带雨林生活的蛇怪蜥蜴[10-11]是一种能够在水面高速奔跑的动物,身体密度大于水,经过上亿年的进化,其能够依靠两个脚掌高频率地踩踏水面,实现在水面上的高速奔跑,如图6所示。它利用两个脚掌面积以合适的角度、高频率踩踏水面,产生向前的奔跑力和向上的托举力,使得蛇怪蜥蜴在水面奔跑如履平地。

图6 蛇怪蜥蜴高速踏水奔跑过程Fig.6 Course of basilisk lizard treading water at high speed
此向上托举力的产生机理与舰船、两栖车辆阿基米德排水浮力原理有本质的不同,它揭示了这样的一个重要原理:在高速条件下,固体和液体的相互作用实质上与固体和固体的相互作用相同,会产生极大的作用力。我们可利用这一机理进行两栖车辆航态改变技术研究。
1.3 推进原理分析
通过观察和分析蛇怪蜥蜴的水上高速奔跑过程,深入研究蛇怪蜥蜴在水面奔跑时流体和固体相互作用的动力学原理,抛弃以往两栖车辆排水型浮力方式,在仿真分析和原理试验基础上,提出了一种新型两栖车辆推进技术。
基于此技术设计了一种轮-叶复合式推进装置。首先,它与传统两栖车辆阿基米德体积排水产生浮力原理不同,其实质是利用仿生叶轮叶片高速连续地拍击水面,产生向上托举力F1和水平推进力F2,随着叶轮转速的提高,产生固-液作用力不断增大,将两栖车辆托举出水面,进入滑行状态,从而避开“阻力墙”达到减小水阻力的目的,基本原理如图7所示。
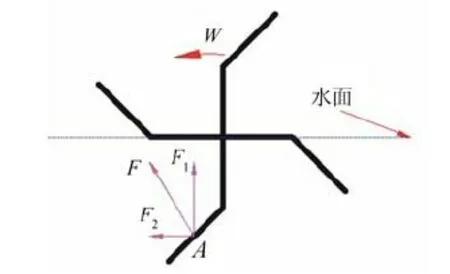
图7 轮-叶复合式推进装置基本原理图Fig.7 Basic principle diagram of the wheel-blade compound propulsive equipment
1.4 仿真分析
为验证设想装置的作用效果,课题组人员应用流体仿真软件Fluent中的动网格技术,VOF 模型及UDF函数对新型轮-叶复合式推进装置水动力性能进行运动仿真,先从理论上验证减阻推进技术的可行性。
(1)应用Pro/E软件建立推进装置三维造型,采用GAMBIT 软件进行网格划分,如图8所示。
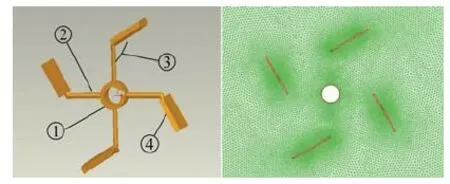
图8 轮-叶复合式推进装置三维造型和网格划分Fig.8 Three dimensional sculpt and gridding partition of the wheel-blade compound propulsive equipment
(2)将轮-叶复合式推进装置的旋转运动视为二维不可压非定常流动,采用时均形式的连续方程,Reynolds时均Navier-Stokes方程和标量φ的时均输运方程,描述为:
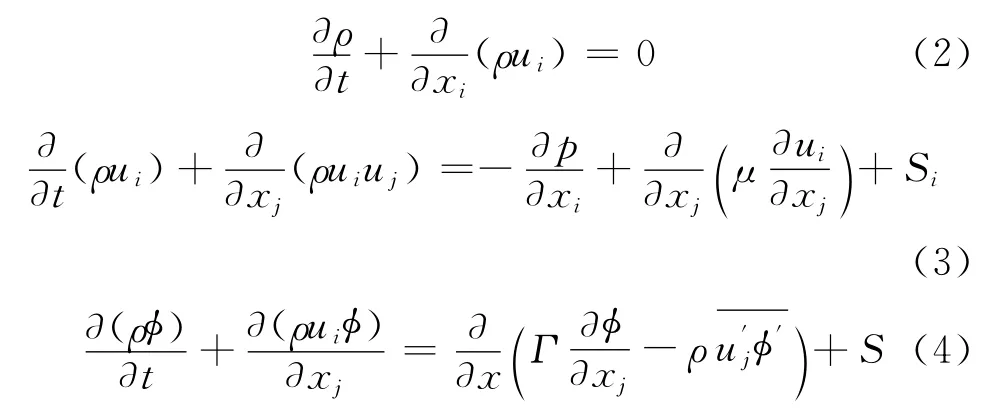
式中:ui,uj为速度分量时均值(i,j=1,2);p为压力时均值;ρ为流体密度;μ为流体粘性系数;为雷诺应力项;φ为通用变量;Γ为广义扩散系数;S为广义源项。
其中,非定常湍流计算采用RNGκ-ε湍流模型[12],该模型很好地处理高应变率及流线弯曲程度较大的流动。利用UDF 定义轮-叶复合式推进装置角速度ω=5rad/s;在初始化过程中将上半部分设为空气,下半部分为水。
设叶轮旋转轴中心与水平面距离为浸水深度h,连接杆与叶片夹角为θ。分析在不同浸水深度h或夹角θ下,轮-叶复合式推进装置的水动力性能。
(3)首先设轮-叶复合式推进装置浸水深度为h=-0.4m(完全处于水下),θ=120°,仿真分析此状态下的水动力性能,如图9~11所示。

图9 下潜状态产生的托举力和推进力Fig.9 Propulsive force and lift force when submerging
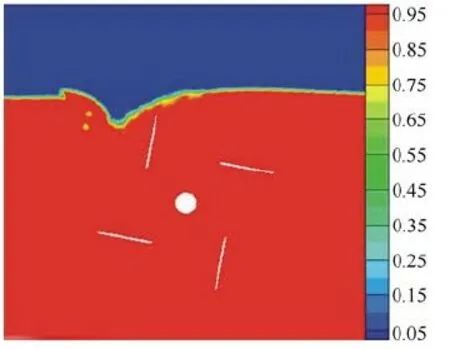
图10 下潜时的体积分数分布图Fig.10 Volume fraction distribution when submerging
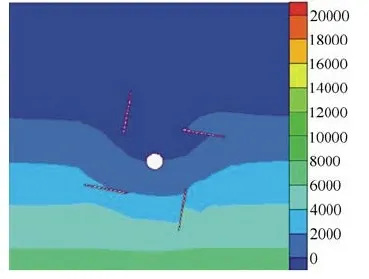
图11 下潜时的压力云图Fig.11 Pressure nephogram when submerging
如图9中所示,选取0~1.65s内1650个时间节点,仿真得出各时间节点轮-叶复合式推进装置的力学特性,其中上半部分为托举力,下半部分为推进力。可以看出,推进装置在完全置于水下(图10显示此时叶轮的水中状态)旋转时,产生近似正弦或余弦的向上托举力和向前的推进力,两者呈周期性波动。其中托举力最大值为513.29N,推进力最大值达到451.65N,并且托举力和推进力大部分处于正值范围内,由此可见通过仿生叶轮转动,可实现车体从水下托出水面,进入滑行状态。图11为0.75s时刻各仿生叶片的压力云图。两侧压力差对叶片面积的积分即为单个叶片受力大小,进而可求整个仿生叶轮所受到的托举力和牵引力。
(4)仿生叶轮浸水深度h分别为-0.20m、0m、0.2m(处于水-气两相介质中),夹角θ=120°时,仿真分析推进装置的水动力性能,如图12和13所示。
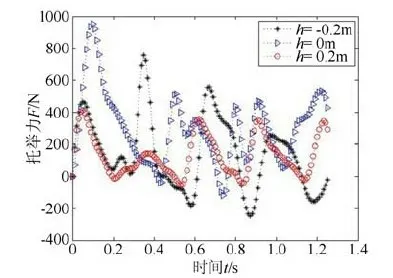
图12 不同浸水深度产生的托举力Fig.12 Lift force at different deepness in water
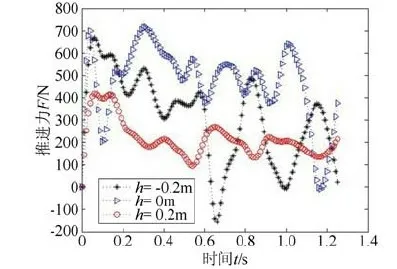
图13 不同浸水深度产生的推进力Fig.13 Propulsive force at different deepness in water
从图14和15分析得出,在一个旋转周期内,h=0m 时产生的平均推进力和托举力均最大,h=-0.2m、0.2m 时相对较小,其中牵引力在h=0.2m 时最小。这是由于此状态下仿生叶轮拍打的水体积较少,故作用力较小,与实际相符。
(5)设仿生叶轮浸水深度h=0,夹角条件θ为105°、120°和135°时,仿真分析推进装置的水动力性能,如图14和15所示。
从图11和12分析得出,θ=135°时仿生叶轮产生的平均推进力最大,θ=120°、105°依次减小;θ=105°时产生的平均托举力最大,θ=120°、135°时依次减小。可得到当θ增加时,推进力增大,托举力相应减小。

图14 不同夹角推进装置产生的托举力Fig14 Lift force at different angles
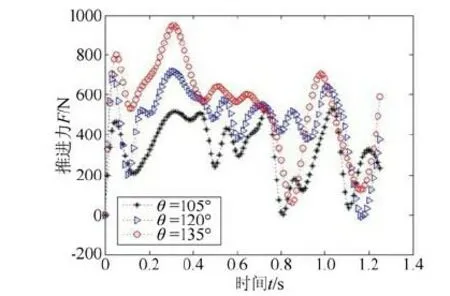
图15 不同夹角推进装置产生的推进力Fig15 Propulsive force at different angles
(6)仿真结果分析:①设想的轮-叶复合式推进装置能够产生向上的托举力和向前的推进力;②推进装置在不同浸水深度h和夹角θ时产生的推进力和托举力不同,其中θ增大时,托举力减小,推进力增大;③随着ω增大,产生的托举力不断增大,定能将两栖车辆托出水面,进入滑行状态,从而减小水阻力。 由此可见,基于蛇怪蜥蜴踏水机理设计的新型轮-叶复合式两栖车辆水上推进装置在理论上是可行的。
1.5 试验论证
在仿真分析的基础上,进一步开展了轮-叶复合式推进装置原理试验,试验效果良好。
试验一:课题组研究设计了仿生叶轮机构,采用两台电机驱动单组仿生叶轮机构,电机功率为0.25kW,箱体内包括2块充电电瓶,电机和传动装置总质量30kg。开始时,整个机构沉入水中;通电后,叶轮拍打水面,箱体被托起一定角度,如图16(a)所示。经浮力实验测试,在水中将箱体一端提升到相同角度需要150N 的作用力,即采用额定功率为0.25kW 的电机产生了150N 的托举力。
实验二:课题组用4台电机制作了无排水浮箱的双组仿生叶轮机构,每台电机额定功率为0.25kW,总质量约25kg。未加电时,由于重力大于浮力,叶轮及电机沉入水中;加电后,因叶轮转速提高而托起整个机构,整个机构被完全托出水面,仿生叶轮几乎与水面相切,提升效果良好,如图16(b)所示。
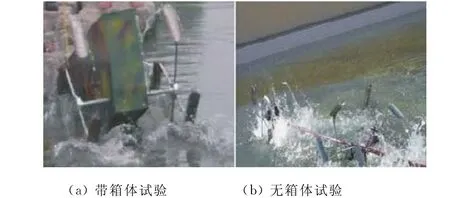
图16 推进原理试验Fig.16 Principle tests of the propulsion
先期试验效果表明,在较小输出功率下,依靠仿生叶轮与水的高速作用产生的托举力,可把较大重量的车体托出水面,进入滑行状态,从而减小水阻力。据此原理,若采用大功率发动机,产生的托举力足以将渡海车辆托举出水面,进入滑行状态。因此,所设想的轮-叶复合式两栖车辆水上推进技术,在原理上具有可行性。
在以后的研究中,将进一步优化仿生叶轮的结构、参数、材质等,使得仿生叶轮的水动力性能和机械传动性能达到最优。
2 结束语
通过理论分析和原理试验论证,提出的基于蛇怪蜥蜴踏水机理的轮-叶式两栖车辆水上推进技术达到了预期的设想,能够在不具备大功率车载发动机和复杂滑板技术的情况下,通过改变航态,巧妙地避开了两栖车辆提速过程中遇到的“阻力墙”现象,大大减小水阻力,有利于航速的大幅度提升。此外,该技术原理还可用于船舶等其他排水型载具的水上推进研究。
[1] 王瑾.高速两栖突击车[J].兵器知识,2009,(11):34-36.[2] 李莉,王宪成,韩树,等.两栖装甲车辆兴波阻力的计算及流场分析[J].兵工学报,2010,31(8):1103-1105.
[3] 贾小平,于魁龙.减小两栖车辆水上行驶阻力的方案探讨[J].装甲兵工程学院学报,1998,129(3):54-58.
[4] 韩占忠,王国玉,闫为革.两栖车辆航行粘性阻力数值分析[J].车辆与动力技术,2003,90(2):6-10.
[5] 胡海坤,张声涛,熊克芳.车辆“减阻等速”研究与试验[J].车辆与动力技术,2006,101(1):5-10.
[6] 宋桂霞,赵又群.减少两栖车辆兴波及阻力方法研究与仿真分析[J].系统仿真技术,2010,6(2):110-115.
[7] 宋桂霞,沈磊.两栖车辆车轮收起前后阻力对比并行计算分析[J].机械科学与技术,2010,29(8):1151-1155.
[8] 李雄,吴颖.AAAV 先进两栖突击车[J].兵器博览.2003,(3):14-17.
[9] 潘玉田,雷建宇,马新谋,等.提高两栖战斗车辆水上航速的研究[J].火炮发射与控制学报,2005,(3):69-72.
[10]TONIA H S,LAUDER G V.Running on water:threedimensional force generation by basilisk lizards[J].Proc.Natl Acad.Sci,2004(101):16784-16788.
[11]GLASHEEN J W,MCMAHON T A.A hydrodynamic model of locomotion in basilisk lizard[J].Nature,1996(380):340-342.
[12]王福军.计算流体动力学分析——CFD 软件原理与应用[M].北京:清华大学出版社,2004.
