主动防翻装置控制系统设计
2012-11-18李秋林
李秋林 杨 朝
(中国第一重型机械股份公司重型装备事业部,黑龙江 161041)
重型半挂车具有质心位置高、质量和体积大、轮距相对于车身高度过窄、后部运动放大等特点,并且牵引车和挂车之间存在复杂的耦合关系,导致行驶过程中极易发生摆振、侧翻和折叠等危险工况。其中半挂车侧翻事故与别的事故比起来,带来的损失和伤害也比较大。
由于半挂车的结构特点易导致发生侧翻,目前国内外主要采用以下系统来提高车辆的侧翻稳定性:侧倾警告装置、电控制动系统、侧倾稳定控制系统、侧倾支持系统和车轴自转向控制系统等[1,2]。这些系统主要是通过电子测试装置监测转弯时的车速或半挂车横向加速度阈值,再通过控制系统控制发动机的输出扭矩和车轴转向,从而达到提高车辆侧翻稳定性的目的。但以上系统也仅仅只能算作被动防翻装置,它们只能在半挂车固有的侧翻极限内对车辆的稳定性进行调节,调节的范围十分有限。笔者从半挂车侧翻力矩的成因入手,设计了一套半挂车液压主动防翻装置,首先通过加速度传感器检测车辆的横向加速度阈值,然后由控制系统控制液压缸推动主要侧翻部分向反倾斜方向转动,进而提高车辆本身的侧翻极限加速度。本文根据主动防翻装置的特点,设计了基于模糊自整定PID 算法的液压控制系统,并通过仿真验证其合理性。
1 系统分析
1.1 系统结构
以某型号半挂车为原型,加装了一套液压主动防翻装置,如图1 所示。其中液压缸的壳体和液压杆分别与货厢和防翻液压缸支臂通过铰链连接。当加速度传感器检测到车体的横向加速度达到或超过设定值时,液压缸开始动作,推动主要翻转部分向反倾斜方向转动,同时通过控制车身平面垂线与地面垂线间的夹角(以后称可控角),以达到控制侧翻极限横向加速度的目的。并且当液压缸达到设定的伸出量时,液压缸将停止运动。

图1 半挂车结构模型Figure 1 Structure model of semitrailer
主动防翻装置同步液压回路如图2 所示。当半挂车的横向加速度未达到所设定值时,液压泵通过卸荷阀进行卸荷;当半挂车的横向加速度达到或超过设定值时,卸荷阀关闭,电磁换向阀得电,三位四通换向阀4 置于右位,三位四通换向阀5 置于左位,液压缸14、16 同步伸出,液压缸15、17 在货厢的作用下同步缩回。在整个系统中,货厢质量非常大,采用液控单向阀可以在液压系统故障时保证货厢不会突然失稳。在不同的工况下,液压缸需要通过控制系统产生不同的作用速度,因此采用比例单向调速阀可以对液流速度进行调节。
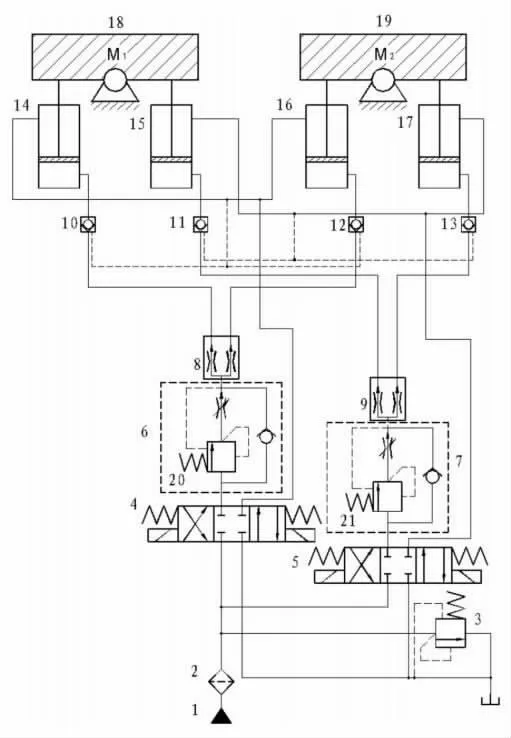
图2 主动防翻装置同步液压回路Figure 2 Simultaneous hydraulic circuit of active anti-turnoff device
1.2 液压系统的数学模型建立
在建立系统动态数学模型前,作如下假设:
(1)油液的密度、黏度和弹性模量不随压力和温度的变化而变化;
(2)忽略三位四通换向阀开启过程对系统动态特性的影响,认为是瞬时开启;
(3)将液压系统各处的油液外泄漏量用一个参数进行修正。
液压系统中所采用的比例单向调速阀由定差减压阀和比例节流阀串联而成,一定的控制电流对应一定的节流口通流面积,且均为薄壁孔口,忽略阀芯自重、摩擦力和瞬态液动力。在压力补偿阀的作用下,调速阀的进出口压力差基本保持不变;而由于偏载引起的同侧两液压缸流入液压油的流量变化将由分流阀进行调节,因此通过比例单向调速阀进入同侧液压缸的总流量为[3]。

式中 CdT——节流阀阀口流量系数;
Ar——节流阀阀口通流面积;
k0——减压阀上腔弹簧刚度;
x0——减压阀上腔弹簧预压缩量;
ρ——油液密度;
Aj——减压阀阀芯有效作用面积。
在比例单向调速阀流量公式中,节流阀阀口的通流面积AT为可调量,通过控制AT的大小来实现对液压缸伸缩速度的调节。并且由公式(1)可以看出调速阀进出口压力差对其流量没有影响。
由于在主动防翻装置液压系统中,是通过控制执行液压缸的输出位移y 来实现对可控角φT的控制,两者在结构上的关系如图3 所示,得到其关系式为

式中 lAB——铰接点A、B 的连线长;
lYYG——液压缸初始长度。
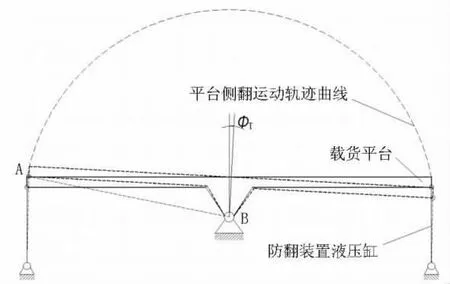
图3 侧翻平台运动关系Figure 3 Movement relation of side turn table
考虑液压缸的连续方程,由可压缩流体连续方程和公式(2)可得到负载流量为

式中 s——拉普拉斯变换因子;
AH——液压缸活塞面积;
YT——可控角φT拉氏变换后的表达形式;
cep——为泄漏系数;
βe——为油液弹性模量;
V——液压缸腔内容积;
PL——液压缸负载压力。
由液压缸和负载的力平衡方程,忽略摩擦力和油液的质量,根据牛顿第二定律有

式中 m——活塞及折算到活塞上的质量;
Bp——活塞及负载的黏性阻尼系数;
k——负载弹性系数;
f——作用活塞上的干扰力。
由于在本阀控液压系统中,k、Bp都比较小,而且调速阀的节流阀阀口通流面积与流经的电流呈线性关系AT=kxI,因此由式(1)、(3)和(4)可以得到阀控液压缸开环传递函数为

2 控制方法及策略
由于重型半挂车在转弯的过程中所承受的横向加速度是由其行驶速度、转弯半径等因素决定的,而主动防翻装置不可能改变其大小,但可以通过防翻装置的作用改变车体的极限侧翻横向加速度,所以考虑在控制过程中将传感器实测的横向加速度与液压缸控制的实时极限侧翻横向加速度的差保持为定值,从而使半挂车始终处于安全状态。
具体的控制方法为:首先通过实测得到车体的横向加速度ay,然后将实测值加上固定的阈值得到此时对应的侧翻极限加速度,再计算出簧载质量的可控角φT,并与测量得到的φTs进行比较得到偏差e,最后通过模糊PID 对液压缸进行控制。侧翻极限加速度与可控角φT的关系为[4]。

式中 T——车轴长度;
hcm——车体重心到地面的高度;
ays——预设固定阈值。
2.1 模糊PID 控制系统结构
模糊控制是智能控制的一个重要分支,对于不能准确确定控制对象数学模型的系统有很好的适应性,具有算法简单、鲁棒性强等优点。针对本液压系统所确定的控制系统结构原理图如图4 所示[5,6,7]。

图4 模糊PID 控制系统结构Figure 4 Structure of ambiguous PID control system
2.2 模糊PID 控制系统参数
在阀控主动防翻装置液压控制系统中,选取可控角位移偏差e、偏差变化率ec 作为输入语言变量,常规PID 控制器的比例系数Kp、积分系数KI和微分系数KD作为输出语言变量[8]。
将以上变量分别定义7 个模糊子集:PB(正大)、PM(正中)、PS(正小)、ZE(零)、NS(负小)、NM(负中)、NB(负大),根据上述专家经验知识可以总结出模糊PID 控制中输出量Kp、KI、KD调整规则如表1 所示。
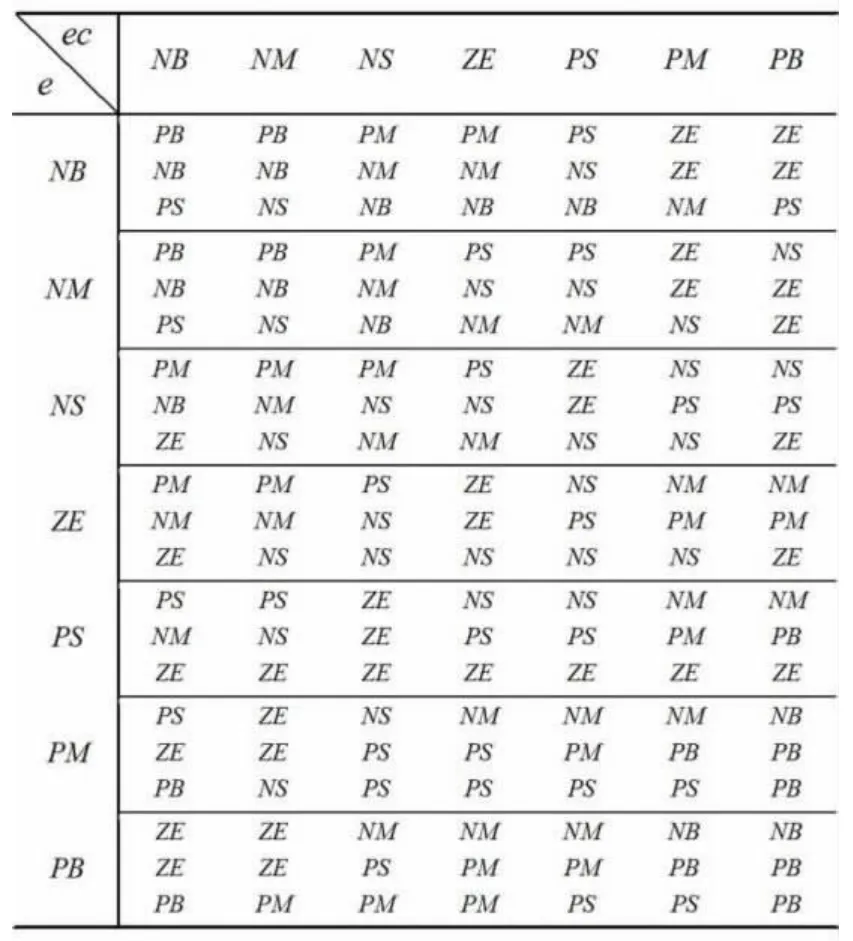
表1 Kp、KI、KD模糊规则表Table 1 Ambiguous rule of Kp,KI,KD
设定输入量e、ec 和输出量Kp、KI、KD的论域为{0,1,2,3,4,5,6},并且选取输入量的隶属函数形式为三角形,如图5 所示。根据输入量和输出量的实际取值,确定其各自的量化因子分别为{30,15,2,0.2,0.2}。
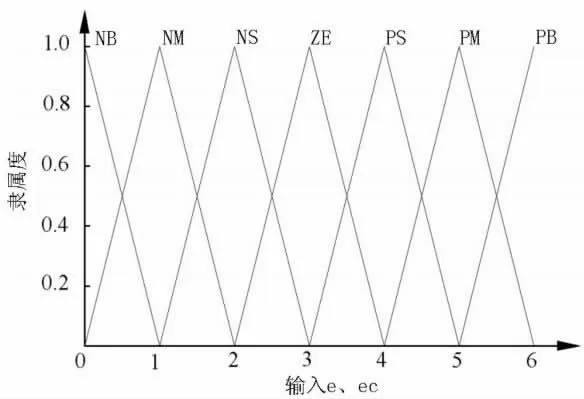
图5 e、ec 的隶属度函数Figure 5 Membership functions of e,ec
3 仿真分析
根据以上机构的数学模型和图4 的模糊PID控制结构图以及表1 中的模糊规则,在MATLAB/Simulink 中建立起主动防翻装置控制系统的模糊PID 仿真模型,并与常规PID 控制进行比较,如图6 所示。
在此液压控制系统中,设定加速度固定阈值为ays=0.05 g,由公式(6)可以计算出使液压缸运动的最小横向加速度应为aymin=0.25 g,因此当传感器检测到车体的横向加速度大于或等于0.25 g 时,主动防翻装置开始起作用。
仿真时,设置车体横向加速度的阶跃值为0.32 g,其大于最小横向加速度值0.25 g,液压缸运动,得到可控角φT的变化曲线如图7 所示。

图6 控制系统仿真模型Figure 6 Simulation model of the control system

图7 可控角度变化曲线Figure 7 Change curve of controlled angle
由图7 可以看出,模糊PID 控制系统的调节最后应用MATLAB/Simulink 同时对常规PID 控制算法和模糊PID 控制算法进行仿真。通过对比时间为0.175 s,其最大超调量为16.7%;常规PID 控制系统的调节时间为0.2 s,其最大超调量为34.6%。因此,可以总结出在主动防翻装置液压控制系统中,模糊PID 具有很好的适应性,而且对液压缸输出位移控制的精度更高。
4 结论
本文通过分析主动防翻装置机构运动和液压系统结构组成,首先建立起液压控制系统的数学模型,然后根据被控对象的特点制定出相应的控制策略,并设计出基于模糊PID 算法的控制系统,发现,模糊PID 算法缩短了控制系统的上升时间、减小了最大超调量,具有更好的适应性和鲁棒性,这为下一步进行控制系统的硬件设计提供了依据。
[1]W.B.Winkler.Rollover of Heavy Commercial Vehicles[D].Michigan:The University of Michigan,1999.
[2]S.YIM,Y.PARK,K.YI.Design of Active Suspension and Electronic Stability Program for Rollover Prevention[J].Automotive technology,2010,11(2):147-153.
[3]宋志安.基于MATLAB 的液压伺服控制系统分析与设计[M].北京:国防工业出版社.2007.6.
[4]金智林,翁建生,胡海岩.汽车侧翻及稳定性分析[J].机械科学与技术,2007,26(3):355-358.
[5]洪跃,刘宝运,金士良等.模糊控制在液体粘性离合器中的应用[J].机械设计与研究,2008,24(1):58-67.
[6]姚嘉凌,郑加强,易捷.滞回模型磁流变减振器半主动悬架模糊控制[J].机械设计与研究,2008,24(5):51-59.
[7]宁凤艳.码垛机器人动力学建模与滑移模糊控制[J].机械设计与研究,2010,26(1):44-47.
[8]席爱民.模糊控制技术[M].陕西:西安电子科技大学出版社.2008.6.
