无地面控制点的无人机遥感影像几何校正算法
2012-11-15李玉霞
刘 异,李玉霞,童 玲
(电子科技大学自动化工程学院,四川成都611731)
无地面控制点的无人机遥感影像几何校正算法
刘 异,李玉霞,童 玲
(电子科技大学自动化工程学院,四川成都611731)
针对有畸变且无地面控制点的无人机遥感影像,提出以分块方式提取图像中心区域特征点作为基准伪控制点对另一幅图像进行几何校正的算法。以两个图像中心连线的中垂线划分重叠区域为两块,选取一幅图像靠近中心点的块重叠区域内有效特征点为基准伪控制点,以第二幅图像上对应的特征点为待校正伪控制点,校正该块重叠区域;以类似的方法校正另一半重叠区域。试验结果证明,校正后地物点的坐标与基准影像上该地物点的坐标的几何畸变残差平均值比校正前大幅度减小,有明显的校正效果。
无人机遥感;几何畸变校正;伪控制点;无地面控制点;重叠区域
一、引 言
无人机低空遥感系统广泛应用于各种资源勘探、灾害监测等领域[1],当应用于灾害监测时,因地理环境恶劣、灾害频发等原因,难以建立野外实测地面控制点(ground control points,GCPs),无法应用传统的地理参照几何校正方法进行几何校正[2-3],从而制约了无人机遥感数据在灾害信息提取和分析时的快速高效应用。因此,本文主要研究如何在无地面控制点和未知任何外方位元素[4]辅助的条件下实时、有效地完成无人机遥感影像的几何校正。
二、几何校正算法
本文在研究了常用的地理参照几何校正方法和图像地理编码几何校正方法后,结合两幅图像间的几何畸变特点和特征点特性,提出了以分块方式提取靠近图像中心区域的有效特征点取代GCPs作为新的控制点(也可称之为伪控制点),校正连续图像间的重叠区域的方法。本方法不需要地面控制点和外方位元素的辅助修正,因此打破了传统方法的局限性。
1.消除旋转误差
本次试验对象的旋转角度较小,最大旋转不超过15°。本文利用相位相关[5]的方法消除旋转误差:取一幅图像为基准,以步长为0.1°旋转另一幅图像,计算每次旋转下的两幅图像的相位相关系数,则系数为最大值时的旋转角度即为两幅图像的旋转角,从而消除两幅影像间的旋转误差。
2.伪控制点对的有效提取
(1)伪控制点的粗提取
由几何畸变原理知,一幅影像上越靠近中心区域其地物成像畸变越小,因此笔者提取靠近中心区域的地物特征点作为基准伪控制点,提取远离中心区域的地物特征点作为待校正伪控制点。改进后的Harris检测方法[6-7]稳定性高,对噪声不敏感,且对L形状的特征点检测性高。因此,本文采用该算法分别检测出两幅图像的特征点作为粗提取的伪控制点。
(2)伪控制点对的精提取
针对以上粗提取的伪控制点,必须经过一定的筛选和配对,才能得到两幅图像间正确匹配的伪控制点对。本文所采用的基于归一化相关系数的算法[8]和基于特征点特征值约束的算法[9],具有简单、准确度高、适应性强等特点。在此基础上,结合无人机遥感影像几何畸变的特征,加入几何约束和最大相关系数约束,不仅提高了匹配的精确度,更减少了计算量,提高了计算速度。
1)特征值约束:筛选出所有特征值比值在[0.1,10]之间的伪控制点对作为初步结果。
2)归一化相关系数约束:考虑到图像的其他畸变因素,本文选取所有相关系数P大于0.8的点对。
3)几何位移关系约束:考虑到图像已消除旋转误差,设图像大小为(width×height),分别在X和Y方向上,删除两点间的位移超过真实位移的±(width×5/180)和±(height×5/180)的点对。
4)最大相关系数约束:若两点为正确匹配的点对,则两者的相关系数为最大且相同。因此分别以每幅图像上的每个伪控制点为基准,提取出其所包含所有点对中相关系数为最大的点对,得到两组点对;再提取两组点对中均有的点对,作为最后精确匹配的点对。
3.重叠区域的几何畸变校正
根据影像成像机理,越靠近图像中心点的位置,像素点畸变越小,因此将校正分为以下几步:
1)伪控制点对分组。如图1所示,设两幅图像分别为图像A和图像B,中心点为oA、oB。检测所有伪控制点对的坐标,计算两个点坐标的和平均坐标,即两点坐标值之和的1/2。图1上伪控制点对(p1/p2)的坐标分别为(x1,y1)和(x2,y2),它们和平均坐标p0的坐标按式(1)求取

设和平均坐标与中心点oA、oB的距离为d1、d2,将所有符合d1<d2的像素点归为一个组a,将其余像素点归为另一个组b。可知,组a上的伪控制点对离图A的中心点更近,组b上的伪控制点对离图B的中心点更近。如图1所示,伪控制点对(p1/p2)属于组a。
2)组a上的伪控制点对由一组A图上的伪控制点和一组B图上的伪控制点组成,则选择A图上的那组点为基准伪控制点(输出),B图的那组点为待校正伪控制点(输入),求取其中的多项式对应系数。如图1所示,p1为多项式输出,p2为多项式输入。
3)重叠区域分块:检测A、B的重叠区域上每个像素点坐标与中心点oA、oB的距离,设为D1和D2;将所有符合D1<D2的像素点(如图1中像素点c)归为块k1,将其余像素点归为另一个块k2。由几何可知,这两个块均为连续完整的图像块,并且分界线近似于两个图像中心点连线的中垂线。
4)如图2所示,将图A上属于块k1的部分作为基准块,图B上属于块k1的部分作为待校正块。按照步骤2)求取的多项式校正待校正块上的每个像素点,得到新的图像块,即为校正后的影像A。
5)图B则重复上述步骤2)、步骤4),将组a和块k1改为组b和块k2,基准部分取图B的部分,待校正部分取图A的部分即可得校正后的影像B。
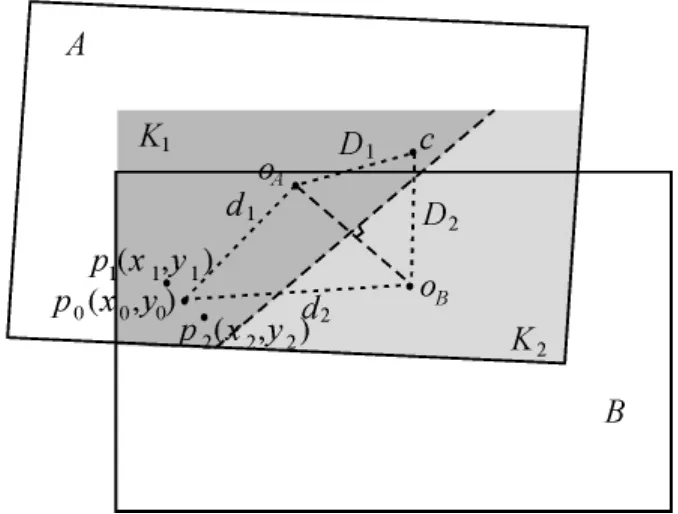
图1 原理图
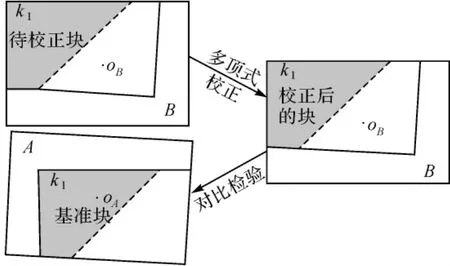
图2 原理图
三、试验结果及分析
本次试验平台为Matlab 7.0,试验对象数据获取情况为天气晴朗无雾,辐射失真相对较小。影像涵盖区域地势相对平坦,地物轮廓特征较明显。
1.地物点重合度检验
图3为选取分散分布的基准影像地物特征点;图4、图5中标记的圆点为基准影像像素点,图4中十字为校正前的拼接影像像素点,图5中十字为校正后的拼接影像像素点。可以看出校正后地物点比校正前更加接近基准影像,几乎重合。因此,其影像间的拼接质量总体有较明显的提高。

图3 基准影像上像素点分布
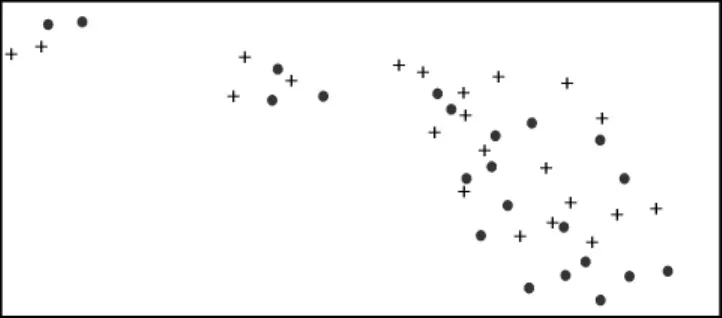
图4 圆点为基准影像像素点,十字为校正前的像素点
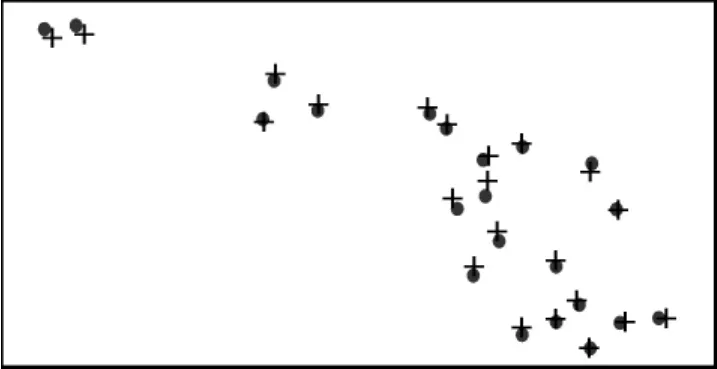
图5 圆点为基准影像像素点,十字为校正后的像素点
2.随机采样检验
在基准图像的重叠区域上选取了20个分布均匀的明显地物点,分别为c1、c2、…、c20,读取它们的像素坐标值,然后分别从校正前后的影像中读取其相应坐标值,计算20个采样点的残差,用于效果评定。图6、图7中的“*”表示基准点坐标,“o”表示校正前点坐标,“口”表示校正后点坐标,x轴表示20个采样点。其中,图6的y轴表示每个采样点在图像中平行于中心扫描线方向上的相对坐标值;图7的y轴表示每个采样点在图像中垂直于中心扫描线方向上的相对坐标值。

图6 平行于中心扫描线(x)方向上的坐标曲线图
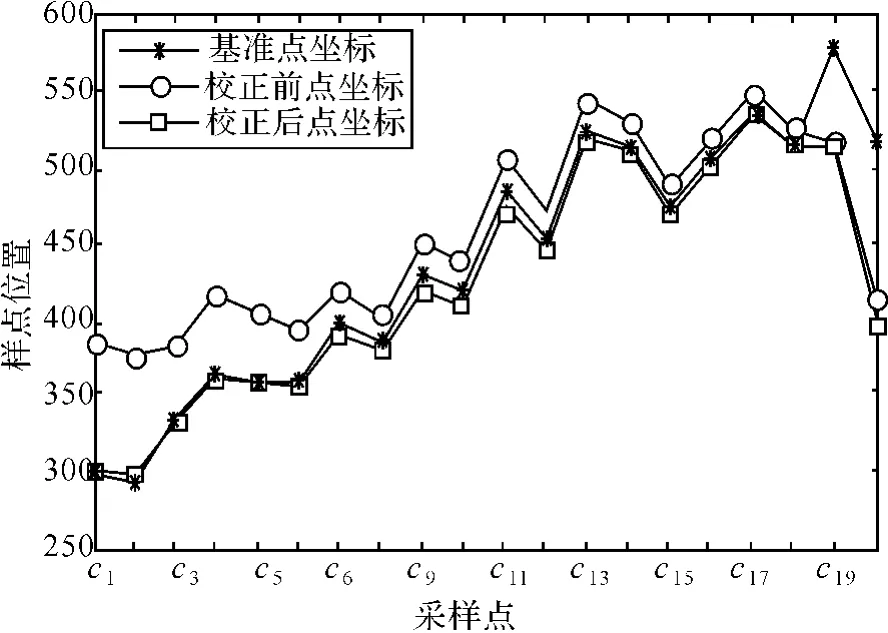
图7 垂直于中心扫描线(y)方向上的坐标曲线图
从图6、图7可以看出,两个方向上校正后的点坐标几乎与基准点坐标曲线重合,而校正前的点坐标曲线则与基准点坐标曲线相差较大。
经计算,校正前采样点在平行于中心扫描线和垂直于中心扫描线方向上的残差分别为42.2和35.7,而校正后采样点在这两个方向上的残差分别为2.4和13.7。说明图像得到了很大程度的校正。
四、结束语
本文在无地面控制点的情况下,不利用未知外方位元素,提出了一种适于无人机低空遥感影像特点的几何校正方法,校正了两幅影像间的重叠区域,在一定程度上减小了影像几何畸变误差。由试验可知,依据本方法提取的伪控制点校正图像使得影像质量较原始图有了大幅度的提高,证明了该方法的有效性,而且保证了算法的精度和速度。针对局部仍有不可避免的小幅度错位的情况,笔者认为地形起伏等因素对校正过程产生了一定的影响,仍需作进一步研究。
[1] ZENG Tao,YANG Wunian,PENG Li,et al.UAV Remote Sensing Image Processing and Classification in Wenchuan Earthquake District[C]∥Proc.SPIE-MIPPR 2009.[S.l.]:SPIE,2009.
[2] 卜彦龙,潘亮,彭辉,等.未知DEM下的机载SAR图像几何校正方法研究[J].测绘学报,2009,38(1): 41-47.
[3] 李立钢,刘波,尤红建,等.星载遥感影像几何精校正算法分析比较[J].光子学报,2006,35(7): 1028-1034.
[4] 李峥.缺少控制点的无人机遥感影像几何校正技术研究[D].成都,电子科技大学,2010.
[5] 孙辉,李志强,孙丽娜,等.基于相位相关的亚像素配准技术及其在电子稳像中的应用[J].中国光学与应用光学,2010,3(5):480-485.
[6] 王明富,杨世洪,吴钦章.基于角点检测的遥感图像几何质量评价方法[J].测绘学报,2011,40(2): 175-179.
[7] 龚平,刘相滨,周鹏.一种改进的Harris角点检测算法[J].计算机工程与应用,2010,46(11):173-175.
[8] 陈志刚,尹福昌,孙孚.基于非采样Contourlet变换高分辨率遥感图像配准[J].光学学报,2009,29(10):2744-2750.
[9] 朱松立,戴礼荣,宋彦,等.基于角点特征值和视差梯度约束的角点匹配[J].计算机工程与应用,2005,41(34):62-64.
Geometric Correction for Unmanned Aerial Vehicle Remote Sensing Image without Ground Control Points
LIU Yi,LI Yuxia,TONG Ling
0494-0911(2012)07-0057-03
P237
B
2011-08-12
刘 异(1988—),女,江西波阳人,硕士生,主要研究方向为无人机低空遥感影像处理。