一种新的激光点云数据精简方法
2012-11-15喜文飞方源敏
喜文飞,方源敏,李 帅,李 健
(昆明理工大学 国土资源工程学院,云南 昆明650093)
一种新的激光点云数据精简方法
喜文飞,方源敏,李 帅,李 健
(昆明理工大学 国土资源工程学院,云南 昆明650093)
三维激光扫描技术是最近几年在测量方面发展起来的一个研究热点。提出利用点云模型中相邻三角形夹角的大小来对点云数据进行直接精简的方法,在matlab平台下,通过编程实现点云数据的压缩。将精简的点云数据通过编程重新构建三角网,最后在Geomagic软件中建模,通过与原始模型进行对比,新方法的压缩效果比较理想。关键词:三维激光扫描;点云数据;matlab;Geomagic
三维激光扫描设备可以从物体表面获得大量的扫描点,虽然扫描得到的点云数据有着很高的精度,但是同样也包含了大量的冗余点。这些冗余点会给计算机的建模、绘制、编辑和传输带来巨大的不便,同时过度密集的数据点也会影响物体重构表面的光滑性,所以,对这些冗余点的删除显得至关重要。
近年来,国内外的许多学者都致力于点云数据压缩的精简研究,取得了一定的成就。常用的点云数据精简方法主要有:包围盒法[1]、均匀网格法[2]、三角网格法[3]以及曲率采样法[4]等。三角形网格简化是目前研究的一个热门话题,它吸引了众多学者关注的目光,并且已经取得了一些成功的算法。在国外,Schroeder提出了基于顶点删除的三角形网格删除算法[5],Isler提出了关于边折叠和三角形折叠法[6],Rossignac提出了顶点聚类的简化法[7],国内的一些专家学者在这方面也取得了一些进展:例如周昆[8]提出通过将三角形折叠与QEM算法相结合的简化算法;刘春[9]等人提出基于真三维TIN的三维激光扫描数据压缩方法。
1 三角形网格算法
在三角形模型中,三角形的顶点和边都是相互共享的,这构成了三角形与其他三角形邻接的关系,可以利用三角形与三角形相邻的关系来进行点云数据的精简。三角形与邻接三角形的夹角决定了该区域的平滑度,它们之间的夹角越小说明该区域越平坦。夹角愈大,说明该区域曲率变化越大,区域变化越复杂。正是基于上述思想,本文通过计算相邻三角形的夹角,通过夹角的大小直接进行三角形的精简。该算法大体可分为以下几步:①三角形法矢量的计算;②计算相邻三角形法矢量的夹角;③设定阈值,判断夹角与阈值的大小;④根据判断的大小进行三角形顶点的删除;⑤三角网格的重建。
如图1所示:P、A、B三点构成一个三角形,它们的坐标分别为:P(x,y,z),A(x1,y1,z1),B(x2,y2,z2)。分别计算PA 与PB 的向量a、b、a=(x1-x,y1-y,z1-z),b=(x2-x,y2-y,z2-z),根据右手定则,定义向量a与b的乘积为
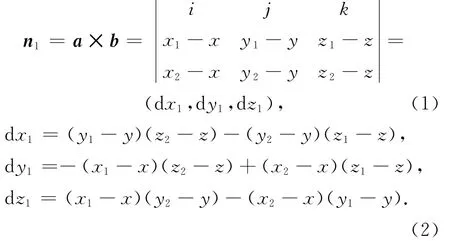

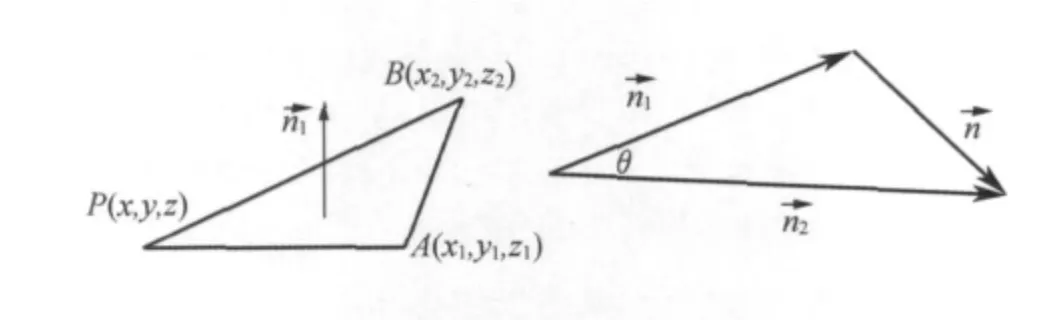
图1 三角形夹角求解过程
2 新算法压缩试验
本次实验是以Intel Pentium(R)Dual-core CPU、主频2.10GHz和内存2.0GB为硬件环境,以Matlab7.0为程序的运行平台。模型的原始点云是10 113个点,对点云数据首先进行了预处理,采用新算法对点云数据压缩的效果如下所示:
通过与原始点云(见图2)模型进行比较,当精简角度为15°时,点云数据压缩后保留了特征点,模型的面部特征点没有被大量的删减掉,原始点云的数量为10 113个,精简了2 327个点云,精简比为23.01%,如图3所示。根据压缩后的点云数据,通过编程构建空间三角网,为了便于比较,选取模型的面部三角网进行分析说明,空间三角网图形如图4所示。
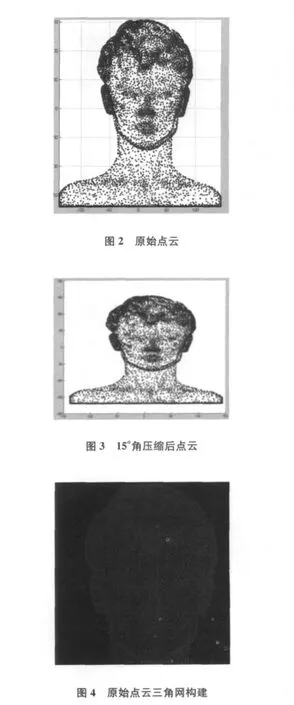
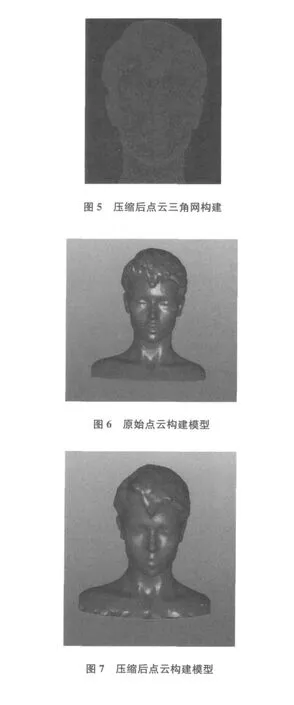
将压缩后构建的点云三角网与原始点云构建的三角网做对比如图5所示。原始的三角网构建的三角形为19 908个,压缩后构建的三角形为15 294个,三角形的精简比为23.18%,在特征点方面,压缩后的三角网构建的比较好,将精简后的点云数据进行三维建模,下面是建模的图形如图6所示。
图6是在Geomagic软件中建模得到的,通过建模,将压缩后构建的模型与原始模型作对比如图7所示,在特征点保留方面,压缩后构建的模型是比较理想的,这说明新的方法对点云数据进行精简还是可行的。
3 结束语
介绍了点云数据精简的一些常用方法,分析了三角网格精简方法的现状,以及已有的一些精简算法,提出了用角度法进行点云数据精简的新算法,通过计算三角网格中相邻三角形之间的夹角,设定阈值来进行点云数据精简,通过构建三角网与原始模型进行比较,新方法在点云压缩方面是可行的。
[1]Weir D J,Milroy M,Bradley C,et al.Reverse engineering physical models employing wrap—aroud B—spline surfaces and quadrics[J].Proc Introduction Mech Engrs—Part BIC J.1996,210(B2):147-157.
[2]Martin R R,Stroud I A,Marshall A D.Data reduction for reverse engineering[J].RECCAD,Deliverable Document 1 COPERNICUS Project.1996,1068,101-113.
[3]Chen Y H,Neg C.T,Wang Y.Z.Data reduction in integrated reverse engineering and rapid prototyping[J].International Journal of Computer Integrated Manufacturing,1999,12(2):97-103.
[4]Saux E,Daniel M.Data reduction of polygonal curves u sin g B—splines[J].Computer-Aided Design,1999,31(8):507-515.
[5]Schroeder W J,Zarge J A.Decimation of triangle meshes[J].Computer Graphics,1992,26(2):65-70.
[6]Isler V,Lau R W H,Green Mark.Real-time multi-resolution modeling for complex virtual environments[A].Proc of VRST’96[C].Hong Kong,1996.11-19.
[7]Rossignac J,Borrel P.Multi-resolution 3D approximation for rendering complex scenes [A].Falcidieno B,Kunii Teds.Geometric Modeling in Computer Graphics[C].New York:Spring Verlag,1993.455-465.
[8]周昆,潘志庚,石教英.基于三角形折叠的网格算法[J].计算机学报,1998,21(6):506-513.
[9]刘春,吴杭彬.基于真三维TIN的三维激光扫描数据压缩方法[J].武汉大学学报:信息科学版,2006,31(10):908-911.
A new research on data compression and simplify technology based on laser scanning point cloud
XI Wen-fei,FANG Yuan-min,LI Shuai,LI Jian
(Faculty of Land Resources and Engineering,Kunming University of Science and Technology,Kunming 650093,China)
P208
A
1006-7949(2012)04-0038-03Abstract:With the development of the measurement technology,the 3 dimension laser scanning technology appeared.It is a high-tech technology and also is the focus of recent survey development.The paper referred to simplify the cloud with the size of point cloud model adjacent triangle’s angles.In the matlab platform,through the programming we get a cloud data compression and refer new method to reconstruct the triangle net using simplified cloud data through programming.Finally we make modeling in Geomagic.Through the comparison with the original model,the new method of the compression effect is more ideal.Key words:3D Laser Scanner System;cloud data;matlab;Geomagic
2011-09-04
喜文飞(1984-),男,硕士研究生.
[责任编辑张德福]
