冷轧带肋钢筋应力松弛试验机的研制
2012-11-15陈光明王志虎张韶辉母宇渊彭建兵
莫 玲,陈光明,王志虎,张韶辉,母宇渊,张 竹,彭建兵
(1.国家日用金属制品质量监督检验中心(成都),四川 成都 610031;2.深圳高品检测设备有限公司,广东 深圳 518112)
0 引 言
冷轧带肋钢筋作为一种高效钢材,具有强度高、塑性好、与砼的锚固性好等特点。大量试验表明,钢筋在高应力(高于松弛下限)作用下会产生流变,应力将随时间而衰减,即出现应力松弛现象。国内外有关预应力混凝土结构设计规范中,都对预应力钢筋的应力松弛值给出了具体规定[1-3]。该应力松弛试验机在充分考虑承力结构刚度、加载装置及样品夹持状况、断电或停电等非正常工作因素对测试结果的影响,满足现行标准和实际工作中的需要。
1 设备结构及辅助软件
1.1 设备结构
该应力松弛试验机使用0.5级试验机,变形检测控制采用GSI MercuryⅡTM1600高精度、高分辨率光栅尺传感器。结合现行标准及预应力钢材应力松弛试验检测发展需要,具有以下特点:
(1)保证负荷误差;
(2)保证试验时试样长度恒定;
(3)试验中数据实时采集;
(4)通过计算机数据分析,建立回归曲线;
(5)防止样品滑移的三爪式夹具;
(6)通过更换夹具可对多种产品(预应力钢丝、钢棒、钢绞线等)进行松弛试验。
试验机结构示意图见图1。

图1 试验机结构示意图
1.2 试验控制及工作原理
试样由两端三爪式夹具夹持,通过高精度伺服电机驱动齿轮减速机,同步带轮传动使高精度滚珠丝杆带动两端三爪式夹具往复运动,使试样受力拉伸。在施力过程中通过光栅尺结合伺服系统对试样的变形及试验力进行实时测量和微控,并适时采集试验数据,直至按标准要求完成试验。
微机控制伺服系统中,负荷放大器、光码器、伺服控制信号由传感器传送,由采样器将信号转化为数字信号,实现数据采集、数据显示和人机对话。下位机可传送控制参数、数据处理、曲线绘制参数等,实现数字闭环伺服控制、接收命令向上位移传送控制数据等。电脑控制伺服系统原理图见图2。

图2 电脑控制伺服系统原理图
1.3 辅助软件
在软件方面,采用MaxTest标准化模块,该软件通过安插于PC机的PCI插槽中的数据处理芯片与力值、变形、位移传感器连接,对整个测试过程进行应力闭环、变形闭环、位移闭环的自动控制。同时该软件结合检测设备,采用变频方式对试样在试验过程中的各项数据进行适时采集。具体为:试验的前300 s按10点/s记录,300 s至试验结束按1点/20 s记录。这样既保证了曲线的真实完整,又减小了曲线记录的容量。
通过辅助软件的程序设定,在试样装夹完成后,只需按“程控”便可按照标准程序进行试验。若其他产品试样需设置不同的操作步骤,只需按“编辑”便可自由设置需要的程序或操作步骤,使用方便快捷。
1.3.1 工作原理
在室温下,对试样施加试验力,保持初始应变、变形或位移恒定,测定应力随时间变化的关系[4]。控制系统有多个可同时工作的并行通道,每个独立通道包括:负荷传感器前置放大器、位移传感器信号处理、传感器供桥电路、滤波/陷波电路、自动调零电路、自动分档电路、高速高精A/D转换数据采集系统、误差比较电路、PID调节器、控制通道切换电路、逻辑控制单元等。数据采集系统由高精度A/D转换器、多路采样保持电路构成。多路采样保持电路构成图见图3。
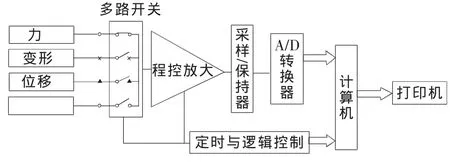
图3 多路采样保持电路构成图
1.3.2 试验数据的采集过程
(1)预采样滤波器为满足采样定理的要求而滤除高频干扰;
(2)采样器按预定的时间间隔将模拟信号离散化,再把离散子样进行量化与编码变成数字信号;
(3)计算机对数字进行处理;
(4)处理结果由数模转换器转换成模拟量;
(5)经平滑滤波器将模拟信号输出。
试验时,指令信号进入放大器,控制伺服驱动器,使电机运动,拉伸试样。力传感器(或位移传感器)测出负载力(或位移),将信号反馈给放大器和指令信号比较,形成闭环回路,实现系统控制(见图4)。反馈信号和给定信号相比较,得到误差信号,经过PID调节器输出,经功率放大器放大后驱动激振器。

图4 闭环控制图
1.4 试验数据处理
(1)达到规定试验时间的松弛率R按下式计算[5]

式中:F0——初始试验力;
Fr——剩余试验力。
(2)为了比较材料的相对松弛率,可绘制松弛率与对数时间的关系曲线。松弛率-对数时间曲线见图5。
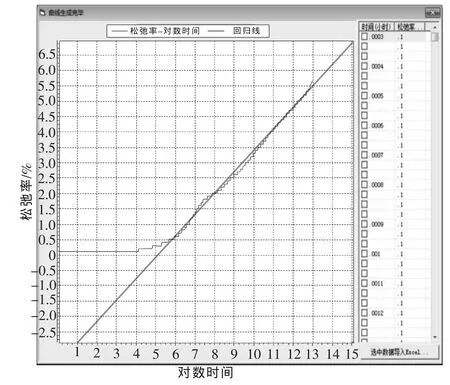
图5 松弛率-对数时间曲线图
(3)可绘制剩余试验力与时间(或对数时间)关系曲线、松弛力与时间(或对数时间)关系曲线。
(4)采用实验数据的线性回归,推算1 000 h的应力松弛性能。
2 设备的技术特点
2.1 完善的负荷精度控制
(1)设备采用了高精度传感器结合伺服系统控制齿轮减速机加载方式,减少试验力施加过程中力值的波动,施力平稳均匀。
(2)试样的夹持上也充分考虑冷轧带肋钢筋样品外形的不规则性,采用三爪夹具三面夹持,斜面收紧的方式,有效防止试样打滑对加载过程精度的影响。三爪夹具结构示意图见图6,夹具剖面示意图见图7。

图6 夹具结构示意图

图7 夹具剖面示意图
2.2 有效的同轴度控制设计
2.2.1 设备结构设计
为防止长时间试验导致结构刚度不足对试验产生影响[6],试验机采用四横梁、短行程的机架设计方式。试验机机架图见图8。

图8 试验机机架图
2.2.2 试样装夹
为避免样品外形不规则导致装夹后轴线偏离,试验机设计成穿孔式装夹方式。试样夹具座示意图见图9,标距夹头结构示意图见图10。
2.2.3 结构力学
三爪夹具往复运动时,由于加载过程中的微小冲击或振动可能引起试验机的微量变形,产生同轴度偏差,从而使试验过程中位移形变控制出现偏离,因此该试验机在设计上充分考虑了承载能力。从图1可以看出,在试验过程中,主要的受力部件由机座、横梁和横梁支板及夹持工装4个部分组成。试验机刚度用横梁和横梁支板的承载能力和变形量加以衡量。
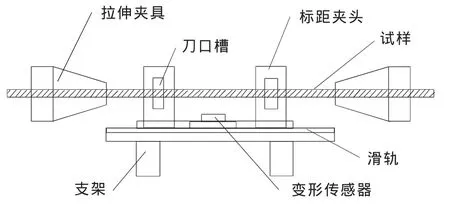
图9 试样夹具座示意图

图10 标距夹头结构示意图
根据表1、表2的测试结果可以看出,试验机的结构能充分保证其刚度。

表1 横梁和横梁支板承载能力1)

表2 不同载荷下横梁和横梁支板的变形量1)
2.3 精确的应变控制配置
该试验机采用分辨率为0.5 μm的进口反射式光栅尺,可以有效保证光栅尺移动方向与试样受力方向平行。在试验过程中,采用量规对试样标定长度进行实时测量,同时将数据处理分析,再结合伺服系统对试验力进行微控,确保试验期间试样的应变波动控制在GB/T 10120《金属应力松弛试验方法》所规定的±5×10-6mm/mm以内。
2.4 试验过程全闭环控制
该试验机可以适时绘制松驰力和试验时间的关系曲线,并能反映任一时刻的松弛力与试验时间的关系。放大器放大后,驱动激振器,实现对试验机力、位移、变形的三闭环控制。
2.5 安全保护措施
为防止意外断电或停电导致试验中断,试验机配置了UPS附加电源,以及相关安全防护罩等保护措施。
3 结束语
本次研制的电子式应力松弛试验机,较目前国内现行的其他应力松弛试验检测设备,最大的创新点体现在:能满足适时数据采集和控制,确保检测结果的准确性;具有防止打滑的三爪夹具、精确的负荷控制和同轴度控制;通过线性回归分析方法,建立回归曲线,准确推算出试样1000h松弛率值[7],有效提高了检测效率;同时配置了UPS电源,并在冷轧带肋钢筋松弛应力试验机的基础上拓展了检测产品范围,覆盖了主要预应力建筑钢材产品应力松弛试验[8]的检测。
[1]刘立军.YJR-300 kN松弛试验机的研制特点及应用[J].金属制品,1999(1):35-36.
[2]李久林.金属应力松弛试验方法国外标准述评[J].物理测试,1987(6):61-66.
[3]于明琪,车延博,袁世强,等.METRO COM-TL型立式拉体应力松驰试验机YX-1B自动测控系统[J].天津冶金,2001(2):14-18.
[4]张强,王平,李正国,等.SC-200应力松弛试验机研制[C]∥中国钢铁年会论文集(下卷),2001.
[5]GB/T 10120—1996金属应力松弛试验方法[S].北京:中国标准出版社,1996.
[6]毛爱菊.预应力钢材的松弛试验[J].金属制品,2010(5):45-48.
[7]GB 13788—2008冷轧带肋钢筋[S].北京:中国标准出版社,2008.
[8]袁贞义,张立鸿,鲍建华,等.应力松弛试验机的研制[J].工业建筑,2000(12):38-41,50.
