利用ADS80影像测制西部地区大比例尺地形图的快速流程
2012-11-14陈建斌王明孝蔡晓丽
陈建斌,王明孝,张 萍,蔡晓丽
(1.68029部队,甘肃兰州730020;2.甘肃林学院,甘肃天水741000)
利用ADS80影像测制西部地区大比例尺地形图的快速流程
陈建斌1,王明孝1,张 萍1,蔡晓丽2
(1.68029部队,甘肃兰州730020;2.甘肃林学院,甘肃天水741000)
利用ADS80影像对西部某区域进行无控空中三角测量的精度作对比。研究考虑地形高差影响的高程异常拟合方法,提出利用ADS80影像快速测制西部大比例尺地形图的作业流程,并将该流程成功应用于某风电场基础测绘项目中。
ADS80;西部地区;快速流程;高程拟合;数据重构
一、引 言
西部地区以高原高寒和沙漠戈壁为主,地形起伏大,航摄影像投影误差大,外业工作开展困难。航测成图如果采用传统模拟航片或面阵数字影像,由于其连接强度弱,接边工作量大,地面依赖性高,势必造成作业速度慢、周期长、耗资巨大的结果。
ADS80是一种改进的多线阵推扫式成像传感器。它集成了POS系统,能直接获取影像的外方位元素;它拍摄的长条带影像提高了后期处理的效率;大基高比能满足大比例尺测图要求;100%三度重叠影像能提供多种立体模型。
在某风电场1300 km2基础测绘项目中,采用ADS80相机,共规划拍摄33个条带,条带长度从17 257 m到43561 m不等,像元大小6.5 μm,地面分辨率GSD为18 cm。
二、GNSS/IMU辅助空中三角测量精度分析
由于ADS采取的是连续推扫的成像方式,因此飞机的飞行姿态变化将直接影响成像的效果。虽然ADS配置的PAV陀螺稳定平台具有自动调整姿态的功能,在进行中小比例尺航空摄影时,由于飞机高度相对较高,气流比较平稳,而且使用的运8、安30等较大型航测飞机受气流影响也相对较小,俯仰和倾斜变化通常不超过5°。但在大比例尺航空摄影时,一般使用运5、运12等飞机,该类飞机自重小,受气流的影响很大,而低空气流变化本身就较剧烈,俯仰和倾斜变化经常超过5°。另一方面,PAV陀螺稳定平台对姿态变化的修正需要一定的响应时间,对瞬间大姿态变化的修正往往反应滞后,因此,空中飞机姿态的变化情况也能在连续推扫记录的影像中完全体现出来,并直接影响影像的后续处理质量。
GNSS/IMU观测数据的引入,大量减少了外业控制测量的工作量。一直以来,许多学者都对GNSS/IMU辅助空三所需的控制点数量进行了研究[1]。在该项目中,笔者分别用无控、位于区域中心1个控制点、位于区域四周4个控制点、分布均匀的9个控制点等4种方案对测区进行了对比试验。空三解算使用ORIMA软件。结果如表1所示,其中,精度用检查点中误差表示。

表1 4种加密方案精度比较
试验结论如下:
1)在没有地面控制的情况下,将POS(IPAS)数据作为带权观测值引入到区域网平差系统中,平差结果存在一定的系统误差。
2)当引入1个地面控制点时,精度得到了较大提高,平面达到1个像素,高程达到1.3个像素,高程精度提高明显。这表明POS(IPAS)数据存在一定的系统误差,高程分量尤为明显。
3)当引入4个地面控制点时,精度得到了进一步提高,平面、高程精度都达到1个像素,但提高的幅度已不明显。
4)当引入分布均匀的9个控制点时,精度几乎没有提高。
试验表明,POS(IPAS)数据的引入,对地面控制点的要求降到了最低,只需1个位于区域中心的控制点,就能很好地抵偿POS数据的系统误差。如果要解决坐标系统的转换问题,最好使用区域四周4个控制点的方案。
航测内业规范对空三加密的精度的规定如表2所示[2]。
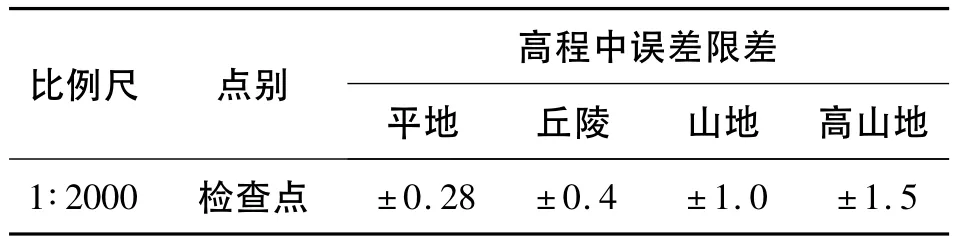
表2 空三加密内业规范 m
限差放宽后,无控加密的最大误差为0.40 m,小于规范中平地的高程中误差限差±0.42 m,符合规范的要求。因此无地面控制的GNSS/IMU辅助空中三角测量的精度能满足西部困难地区1∶2000成图。
三、快速作业流程
1.ADS80通用作业流程
ADS80的推广应用,使得航测成图效率大大提高。这得益于ADS80本身的特点:
1)集成POS系统,可以直接获取影像外方位元素,减少对地面控制的依赖。
2)长条带影像,提高了影像处理效率,航带内无需接边,强度高。
3)100%三度重叠影像具有影像冗余,能以多种组合提供立体模型。
如图1所示,对同一个测量任务,如果采用框幅式像片或面阵影像,外业控制测量、空三加密工作量将非常大。
当采用ADS80通用流程时,空三加密工序被外业控制分割为前后两部分:第1部分包括POS数据解算、连接点选取、L1级影像纠正、控制点概略选点、控制片制作;第2部分包括控制点转刺量测、空三解算。两部分之间是外业控制测量工序。这种流程不适用于应急测绘项目。因为空三加密、外业控制测量耗时太长。进行外业控制测量时,内业人员只能等待,在西部地区,外业展开困难,影响外业进度的因素太多,经常会延误。这种流程难以满足紧急任务(如应急保障、抢险救灾)的需求。
2.ADS80快速作业流程
在总结了上述两种流程的基础上,本项目提出ADS80快速作业流程,如图1所示。
快速流程的特点如下:
1)快速流程采用无控空三加密(无控空三加密的精度下文有具体分析),因为不再依赖于地面控制,空三加密还可以分区域进行,子区域空三加密成果立刻可以提交下工序,这样减少了下工序的等待时间。
2)外业控制测量工序可以与4D数据采编工序同时进行,避免了内业等待造成的窝工。
3)外业控制测量不再是提供控制点的必须工序,而是为矢量重构提供转换参数和高程异常的可选工序,如果有测区精确的转换参数和高程异常,则可以省去外业控制测量工作。
4)流程的最后是对矢量数据进行重构,包括坐标系统转换、高程转换。

图1 作业流程对比
四、快速获取更精确的水准面精化文件
ADS80快速作业流程的最后是对矢量数据进行重构,主要解决高程基准问题,高程重构的精度依赖于水准面精化文件或高程异常模型。
我国似大地水准面分为3个等级[3],如表3所示。

表3 我国似大地水准面等级
在西部广大地区,缺少省级似大地水准面成果,国家级成果精度只有±0.3 m(平地),无法满足1∶2000地形图需要。因此,必须要用合适的拟合方法获得更精确的似大地水准面。
航测成图时,一般不考虑地形高差变化对高程异常的影响。在西部地区,当海拔为2000 m时,由地形因素引起的高程异常变化量最大可以达到0.2 m,已经接近空中三角测量检查点的中误差限差,因此进行高程异常拟合时,必须考虑地面高差引起的高程异常变化量。
精确地确定大地水准面需要地球重力场模型及DEM高程模型,其公式为

对于小区域而言,前两项NGM、NΔg变化相对稳定,只需考虑Nh。如果将高程异常量作为研究对象,有如下公式

式中,ζ0为高程异常的长波项;ζTC为短波项。式(1)中的Nh,是由地形起伏引起的。
地形改正可以看做是重力场的噪声。如果能求解ζTC,并在ζ中将ζTC扣除,则可近似认为ζ0=ζ-ζTC为一个光滑的几何曲面,这样就可以利用测区中已知GPS水准点的正常高和大地高确定一个多项式曲面函数,即小区域高程异常模型,再利用该模型确定其他点的ζ0值。然后,利用ζ=ζ0+ζTC,可求得ζ。

式中,Tc为地形起伏对地面扰动位的影响;r为积分元到积分点p的距离;hi为参考高程;G为万有引力常数;ρ为地球质量密度;hi-hr是正常高差(小区域内可近似用大地高差Hi-Hr代替)。
详细计算步骤为:
1)引入全球格网间距为90 m的SRTM(shuttle radar topography mission),SRTM数据主要是由美国太空总署NASA和国防部国家测绘局NIMA联合测量的全球DEM,用已知的地面控制点对区域SRTM进行多项式纠正,得到最佳附合于已知点的区域DEM。再按式(3)求解DEM格网点的ζTC(格网点),结果如图2所示。
2)利用多项式拟合的方法(此时,用二阶多项式即可),确定一个二次曲面,将DEM格网点带入此二次曲面函数,求得每一格网点的ζ0(格网点),结果如图3所示。
3)利用式(2),求得每一格网点的ζ(格网点),结果如图4所示。

图2 ζTC(格网点)
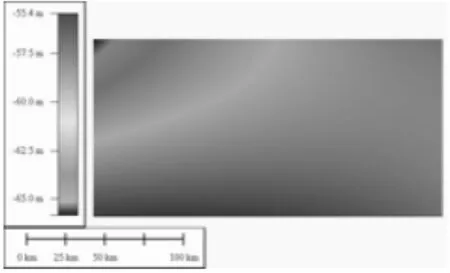
图3 ζ0(格网点)

图4 考虑地形高差因素生成的高程异常模型
五、矢量数据重构
矢量数据重构解决两个问题:平面坐标转换、高程基准转换。
1.平面坐标转换
平面坐标转换通过七参数模型来实现,七参数模型如式(4)、图5所示。涉及3个线元素、3个角元素、1个尺度元素[4]。


图5 七参数转换示意图
2.高程基准转换
矢量重构之高程基准转换较复杂。因为测区内的高程异常值不是常数,不能用统一增加常数的方法解决。要先按本文前述的方法拟合出一个高程异常格网模型,再与矢量数据套合叠加,生成新的矢量数据。这种方法适用于对水系、植被、高程点等要素。
因为等高线有其特殊性:一根等高线上的高程值唯一。而用这种方法重构等高线,生成的曲线上的高程值不再唯一,得到的将是“非等高线”。
解决方法:先将等高线构建TIN、生成DEM,对DEM进行重构建,最后再反生成等高线,如图6所示。

图6 等高线重构流程
在构建TIN时,如果遇到长舌状的等高线,很容易会产生平三角,即单根等高线自构。
GeoTIN软件采用自动增加特征点的方法来解决此问题。如图7所示,在平三角处自动增加特征点,进行二次构网。但仍不可避免会有自构问题。

图7 自动增加特征点并重新构网
本项目采用了另外的构网思路,如图8所示,通过设定适当的搜索半径,使等高线在一定范围内只能与相邻等高线构网,避免“自构”,减少了等高线重构产生的错误。

图8 强制与相邻等高线构网
图9为在WGS-84坐标系、大地高基准上采集的矢量数据。图10为重构后的矢量数据。

图9 基于WGS-84坐标系、大地高的矢量数据

图10 重构后的矢量数据
六、应 用
该技术在某风电场基础测绘任务中得到了实际应用。测区覆盖面积1300 km2,海拔高度在830~1420 m之间,地貌上表现为戈壁平原,以山前冲积为主,地势开阔,植被稀少。利用该技术在2个月时间内完成了风电场航摄、外业控制、1∶2000地形图内业成图任务,极大地节约了人力物力。
[1] 刘军.GPS/IMU辅助机载线阵CCD影像定位技术研究[D].郑州:信息工程大学,2007:66-82.
[2] 国家测绘局.GB/T 23236—2009数字航空摄影空中三角测量规范[S].北京:中国标准出版社,2009:2-3.
[3] 国家测绘局.GB/T 23709—2009区域似大地水准面精化基本技术规定[S].北京:中国标准出版社,2009: 2-3.
[4] 熊介.椭球大地测量学[M].北京:解放军出版社,1985:311-312.
A Quick Working Flow of Large Scale Mapping in Western Region Based on ADS80 Images
CHEN Jianbin,WANG Mingxiao,ZHANG Ping,CAI Xiaoli
0494-0911(2012)08-0043-04
P23
B
2012-01-13
陈建斌(1976—),男,甘肃陇西人,硕士,工程师,主要研究方向为摄影测量与遥感。