利用GPS辅助空三的高原大比例尺航摄测图研究
2012-11-14杨海东张建刚刘宗杰
李 峰,杨海东,张建刚,刘宗杰
(1.北京四维远见信息技术有限公司,北京100070;2.中国测绘科学研究院,北京100830)
利用GPS辅助空三的高原大比例尺航摄测图研究
李 峰1,杨海东2,张建刚1,刘宗杰2
(1.北京四维远见信息技术有限公司,北京100070;2.中国测绘科学研究院,北京100830)
介绍利用国产数字航空摄影仪在青藏高原进行大比例尺测图试验。试验利用GPS辅助空三的方式力求减少外业工作量,通过对不同地面控制方式得到的空三结果进行分析,表明以7条航线、20根基线作为一个平差区域,并在有构架航线的情况下,在区域四角布设平高控制点即可满足测图精度。
GPS辅助空三;大比例尺测图;控制点;精度
一、前 言
进入21世纪以来,摄影测量的理论与方法有了突飞猛进的发展,数码相机的使用越来越广泛。GPS辅助空中三角测量技术的应用,减少了像控点的数量,大大节省了航空摄影测量的外业工作量[1]。随着GPS技术的发展,全球连续运行跟踪站日益增多,IGS可提供精度优于±5 cm的精密星历,卫星钟差改正数可达到0.1~0.2 ns,GPS接收机的性能也不断改善,大气延迟模型愈来愈精确,消弱对流层和电离层延迟误差的方法亦不断完善,非差分单机实现高精度定位成为可能[2]。精密单点定位(precise point positioning,PPP)是相对于一般的单点定位而言的,它是利用GPS精密星历和钟差文件,以载波相位和伪距为观测资料,进行独立的单点精密定位[3]。它的特点在于各站的解算相互独立,计算量远远小于一般的相对定位[4-5]。现在,利用非差分双频载波相位观测值,在初始化后进行单历元精密单点定位,以实现全球范围内的实时动态定位的方法,用于动态航空测量的精度已达到厘米级[6]。目前,实时动态定位的方法被我国测绘学者广泛应用,并有很多软件对观测数据进行解算,武汉大学编写的Trip软件就是其中的代表。
在我国,实时动态定位方法已经在很多项目中得到应用,基于此方法的高精度定位数据应用到GPS辅助空中三角测量,不但取消了地面基站,更进一步减少了地面像控点的数量。为了研究在高原困难地区利用精密单点定位的数据进行GPS辅助空中三角测量,选择西藏的某县城进行试验,试验中飞行了构架航线,以保证高程精度[7]。
二、试验概况
试验测区选择在西藏地区的某县城进行,该县城位于拉萨东北约320 km处,海拔4500 m,地势中间低、四周高,高差约200 m,属山地地形。试验目的为获取1∶1000地形图,采用SWDC-2数字航空摄影仪,设计地面分辨率8 cm,旁向重叠和航向重叠分别为65%和35%,共飞行9条正常航线和2条构架航线,每条航线28根基线。
1.试验外业实施
地面控制点按4~6条航线一行点、15~20根基线一列点的原则进行设计,共设计9个点,控制点以地标的方式铺设。由于地形的限制,有些地方外场工作人员无法到达,导致地标点不能完全按照设计位置布设,为了防止人为破坏,实际布设时在一个点位上布设两个点,共布设18个地标点。地标点位置和航线示意图如图1所示。
由于测区附近没有国家基准点,所以在测区靠近中间的位置安置了GPS观测基站,通过单点静态观测获取其坐标,观测时间大于6 h。各地标点观测30 min,最后通过和基站进行差分解算获取坐标。空中摄站坐标采用武汉大学研制的动态GPS精密单点定位软件Trip进行精密单点定位获取,这种软件解算数据的内符合精度可以到几个厘米的水平,可以实现亚分米级的飞机动态定位,能在不需要地面基准站的条件下达到双差固定解相当的精度水平[8]。

图1 实际的航线和控制点
2.GPS辅助空中三角测量
(1)加密方案
为了验证控制点数量和位置对检查点精度的影响,试验采取4种控制方案对测区数据进行空三加密,具体方案如下:
1)方案1。中间一点定向,其他点检查(如图2所示)。

图2 方案1
2)方案2。两侧两列点定向,中间点检查(如图3所示)。

图3 方案2
3)方案3。周边点定向,中间点检查(如图4所示)。

图4 方案3
4)方案4。密集周边点定向,中间点检查(如图5所示)。

图5 方案4
(2)加密精度
本次试验采用全自动空中三角测量软件Map-AT进行空三加密,区域网平差计算后,基本定向点的残差为:方案1平面最大残差0.236 m,高程最大残差0.290 m;方案2平面最大残差0.241 m,高程最大残差0.244 m;方案3平面最大残差0.223 m,高程最大残差0.167 m;方案4平面最大残差0.300 m,高程最大残差0.151 m。上面结果显示4种方案平差后的控制点平面和高程最大残差均小于0.4 m,符合规范要求[9]。检查点的中误差如表1所示。
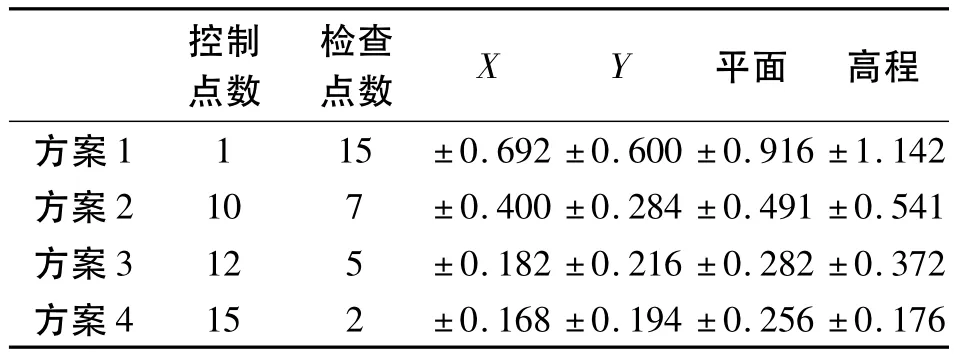
表1 检查点中误差 m
由表1可以看出:
1)在飞行构架航线的基础上,中间一个控制点的区域光束法平差结果不能满足设计需要。
2)在方案2中,由于点1606、4506、25107处于控制区域外,点位误差值超限,导致总体检查点中误差比较大。如果去掉这3个超限点不作为检查点的话,方案2的中误差值会大大减小,达到平面±0.304 m,高程±0.221 m。
3)与方案2相似,方案3中点25107处于控制区域外,如果把这个点去掉不作为检查点,总体检查点中误差值会有所减小,达到平面±0.258 m,高程±0.207 m。
4)如果剔除掉方案2和方案3中控制区域外的检查点,后3种方案结果都能满足要求。同时可知,虽然方案3和方案4的结果精度比方案2的有所提高,但是提高有限。
三、结束语
本次试验采用航摄的方式在高原的山地进行大比例尺测图任务,采用GPS辅助空中三角测量。本文通过对4种方案结果的分析和对比可知,在飞行构架航线的基础上,后3种方案都可满足1∶1000成图要求。从经济的角度看,方案2最佳,在测区两侧布设两列控制点即可满足要求,省去了外业工作量,减少了人力、物力和财力的投入。从图5可以看出,由于本次试验是按点对布设地面点,所谓的两侧两列定向点有4个点对概略位置在测区的四角,落在构架航线上,形成了构架航线加四角定向的结构。这一分析结果表明,构架航线加四角布点的控制方式完全能满足高原1∶1000成图的要求。本次试验的地形限制了工作人员的外场工作,导致了地面点没有布设到设计的位置,如果地面点布设位置理想的话精度还将进一步提高。
[1] 袁修孝.GPS辅助空中三角测量原理及应用[M].北京:测绘出版社,2001.
[2] 袁修孝,付建红,楼益栋。基于精密单点定位技术的GPS辅助空中三角测量[J].测绘学报,2008,36(3): 251-255.
[3] 陈义.利用精密星历进行单点定位的数学模型和初步分析[J].测绘学报,2002,31(1):31-33.
[4] 刘经南,叶世榕.GPS非差相位精密单点定位技术探讨[J].武汉大学学报:信息科学版,2002,27(3): 234-240.
[5] 冯宝红,高成发.利用P3软件进行GPS单点定位解算的若干问题[J].测绘科学技术学报,2008,25(4): 249-251.
[6] 张小红,刘经南,FORSBERG R.基于精密单点定位技术的航空测量应用实践[J].武汉大学学报:信息科学版,2006,31(1):19-22.
[7] 袁修孝.当代航空摄影测量加密的几种方法[J].武汉大学学报:信息科学版,2007,32(11):1001-1006.
[8] 张小红.动态精度单点定位(PPP)的精度分析[J].全球定位系统,2006(1):7-11,22.
[9] 中华人民共和国国家质量监督检验检疫总局,中国国家标准管理委员会.GB/T 23236—2009数字航空摄影测量空中三角测量规范[S].北京:中国标准出版社,2009.
The Study of Large-scale Mapping in Plateau Based on GPS-supported Aerotriangulation
LI Feng,YANG Haidong,ZHANG Jiangang,LIU Zongjie
0494-0911(2012)08-0015-03
P23
B
2011-08-19
国家863计划(2008AA121300);科技部支撑项目(2008BAK491302-1)
李 峰(1981—),男,山东临沂人,工程师,主要从事航空摄影测量方面的研究工作。
