仿生鱼的运动控制算法设计与仿真实现
2012-11-07杜爽袁小花
杜爽 袁小花
西南科技大学信息工程学院自动化系,四川 绵阳 621000
仿生鱼的运动控制算法设计与仿真实现
杜爽 袁小花
西南科技大学信息工程学院自动化系,四川 绵阳 621000
仿生鱼技术涉及控制学、流体力学、结构物理,材料学等多方面的知识,本文在对鱼类游动形态研究的基础上利用MATLAB软件对鱼类游动模型进行了仿真,并建立了数学模型,推导出了鱼类游动姿态曲线函数,进而设计了运动控制系统。
仿生鱼;舵机;控制系统;MATLAB
引言
鱼类在水中具有游动效率高、机动性能好以及对环境扰动小等优点[1],仿生鱼技术的研究已经成为仿生机器人方面的热点之一[2]。鱼类推进机理的研究引起越来越多研究者的兴趣,越来越多的理论研究为仿生鱼技术的发展起到了非常重要的作用。如今,仿生机器鱼的研究正朝着多学科结合、多目标任务控制的方向发展[4]。
本文针对以上现象以“波动推进理论”[3]为理论基础,通过MATLAB仿真仿生机器鱼在摆动过程中的姿态曲线,提取了鱼体脊椎的抽象物理模型,同时,以波动推进理论为控制理论结合时序控制算法,实现了仿生鱼的运动控制。
1 仿生鱼物理结构分析
鱼类身体的构造是由于数根脊椎骨连接而成的,所以鱼类摆动的身体可以看成一系列的铰链连接组成的摆链系统。根据波动推进理论[2]的分析,可以提取鱼类摆动部位的结构形态的物理模型,模型中相关参数有:摆动部位占鱼身总长的比例(K),摆动关结数(N),以及各关节之间的长度比例(L1:L2:…:Ln)。K越大游动效率越高,N的大小决定了摆动关节部分的平滑程度,其中各个摆动关节长度之比为如下图1。
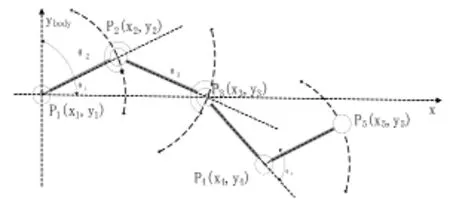
图1 仿生鱼摆动部分铰链式节点轨迹图
在该结构中,关节n的摆动角度θn的范围为0~2π,在笛卡尔坐标系中,假设摆动关节点坐标为 Pn(xn,yn),则将该坐标系下的关节点坐标转化在极坐标系中,可表示为:
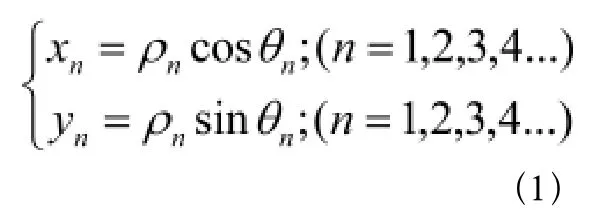
故可以推出得出各个摆动节点的轨迹为:
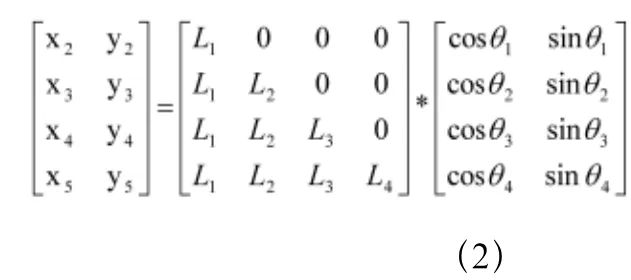
根据以上的关节点坐标,可以通过调节舵机角度θ的值,使得仿生鱼在游动时使流体产分离,并且在尾部产生漩涡。
2 仿生鱼姿态控制分析与仿真
按照波动推进理论, 鱼体波动的形式决定了鱼的游动性能和游动效率。研究人员对各种采用身体波和尾鳍推进方式的鱼类进行了研究, 发现这些鱼类的身体波曲线可以用一个波动方程来表示,Light Hill等人在多年的研究基础上提出的鱼类游动时身体波的方程[3,4,5]表示如下:
ybody是鱼体的横向位移,x是鱼体的轴向位移;K是体波数K=2π/λ,λ是鱼体波的波长,C1是鱼体波波幅包络线的一次项系数,C2是鱼体波波幅包络线的二次项系数,ω是鱼体波频率(ω=2πf=2π/T)。根据仿生机器鱼的各项物理参数,经过多次的尝试得出了较为理想的摆动曲线方程:

利用MATLAB对该曲线方程进行仿真,如图2:
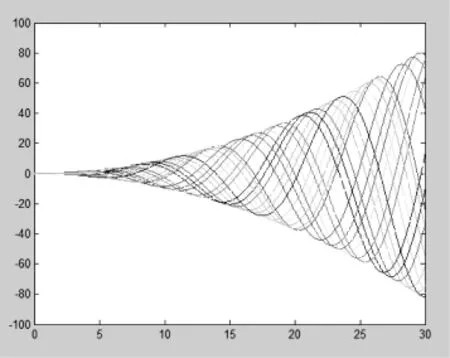
图2 仿真鱼摆动姿态曲线图
根据仿真的姿态曲线,通过对每条姿态曲线进行取样,可以得出图3中的效果图。该图真实的描述了本文设计的仿生机器鱼的摆动轨迹,整体上达到平滑的摆动效果。
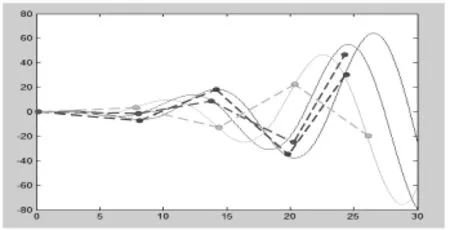
图3 摆动周期内部分关节采样点位置
3、总结
本文对仿生机器鱼的各项参数进行了多次试验,并且所设计控制算法上经过多次的调试,解决了仿生机器鱼在水中的动态平衡问题,基本实现了在模拟仿生机器鱼在水中的游动状态。
本文从仿生机器鱼的机械结构设计上,给出了简化模型的方式,并且根据波动推进理论得出的波动推进曲线,采用取样控制的方案,既结合了摆动过程中的摆动节点的非线性特征,同时也根据柔性鳍波物理模型,提出了控制方案的设计思路。
[1] 张志刚,王硕,桑海泉.仿生机器鱼玩具的机构设计、仿真与实现[J].机器人技术与应用,2004:30~31.
[2] 梁建宏,王田苗,魏洪兴.水下仿生机器鱼的研究进展Ⅰ-鱼类推进机理[J].机器人,2002:107~109.
[3] Light Hill MJ.Aquatic Animal Propulsion of High Hydrom echanical Efficiency.Journal of.Fluids Mechanics,1970.Mech.44:265~301.
[4] 曹长江,张琛,冯建智.多微型机器人系统的协调策略的研究[J].机器人, 2001,23(3): 285~288.
[5] 周志强,王志良等.仿生机器鱼的设计及其运动控制研究[J].微计算机信息,2006:252~259.
[6] 骆涵秀,李世伦,朱捷.机电控制[M].浙江大学出版社,1994:31~63.
TP24
A
10.3969/j.issn.1001-8972.2012.13.074
杜 爽(1990- )女,西南科技大学信息工程学院,在读本科,主要学习方向:智能控制。