增程式电动车驱动系统的参数匹配与仿真研究
2012-11-05谢英杰孟庆楠
谢英杰,孟庆楠
Xie Yingjie, Meng Qingnan
(长城汽车股份有限公司技术中心,河北省汽车工程技术研究中心,河北 保定 071000)
0 引 言
从驱动系统结构上划分,增程式电动汽车应该属于串联式混合动力电动汽车。称其为“增程式电动汽车”,是因为其设计的初衷是以纯电动模式行驶为主,当动力电池电量不足时发动机带动发电机为牵引电动机提供电能,从而“增加”电动汽车的续驶里程,这一行驶模式即称为“增程模式”。
增程式电动汽车不但实现了长续驶里程内的纯电动模式行驶,而且其驱动系统的结构和整车控制策略简单,容易实现。国内外汽车厂纷纷推出自己的增程式电动汽车。增程式电动车驱动系统的组成如图1所示。
1 驱动系统参数匹配
通过一个设计实例,介绍增程式电动汽车驱动系统主要部件的匹配方法,并运用PSAT软件进行整车动力性和经济性的仿真分析和验证。整车的设计与性能目标要求见表1。
1.1 传动装置齿轮传动比的匹配设计
传动装置齿轮传动比的设计应使牵引电动机在最高转速时车辆达到其最高车速,即
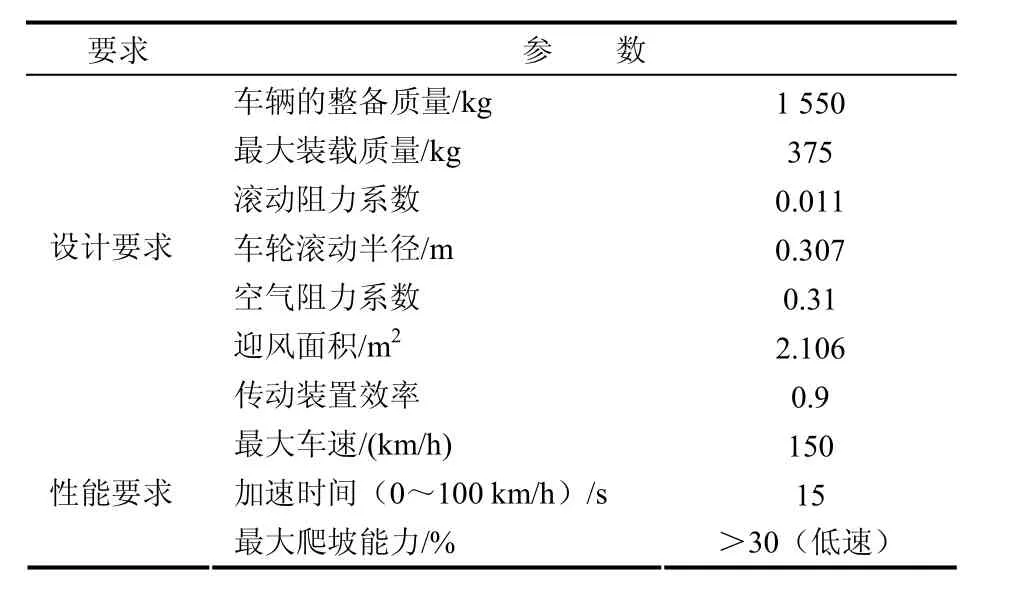
表1 整车的设计要求与性能要求
式中,ig为变速器传动比;io为主减速器传动比;nmax为电动机的最高转速,r/min;rd为车轮滚动半径,m;vmax为最高车速,km/h。
假设牵引电动机的最高转速nmax=8000 r/min,将相应各参数值代入式(1),则可得igio=6.17。
可以由经验公式估算转动惯量系数
式中,δ1表示车轮的作用,其估算值为0.04;δ2表示与动力装置相关的旋转部件的作用,其估算值为0.0025。得到转动惯量系数δ为1.135。
1.2 牵引电动机量值的匹配设计
如图2,显示了牵引电动机的转矩(功率)-转速特性。一般来说牵引电动机的额定功率用于维持车辆等速行驶,而牵引电动机的峰值功率决定车辆的加速特性和爬坡能力。
在串联式混合动力电动汽车中,电动机的峰值功率完全取决于车辆的加速性能要求、电动机特性和传动装置特性。可以根据式(3)推导计算出牵引电动机峰值功率。
式中,Pmax为牵引电动机的峰值功率,kW;ηt为传动系统的传动效率;δ为转动惯量系数;m为车辆质量,kg;ta为加速时间,s;vf为车辆加速后的终速,m/s;vb为相应于牵引电动机基速的车速,m/s,假设牵引电动机的基速nc=2000 r/min,则vb=10.42 m/s;g为重力加速度(9.8 m/s2);f为滚动阻力系数;CD为空气阻力系数;A为迎风面积,m2;ρ为空气密度,一般ρ=1.2258 N⋅s2⋅m-4。
将相应各参数值代入式(3),则可得牵引电动机的峰值功率Pmax=72 kW。
在设计的初始阶段,可应用式(4),按最高车速估算出电动机的额定功率
式中,Pc为牵引电动机的额定功率,kW。
注意,如果不要求车辆能以最高车速持续地稳定行驶,则为了降低成本和减小牵引电动机的体积,应尽量使牵引电动机的额定功率小于由公式(4)计算出的功率值。
根据式(4)计算得Pc=40.87 kW,考虑到实际情况并不要求车辆能以最高车速长时间行驶,所以该功率可适当降低,这里令牵引电动机的额定功率Pc=40 kW。
计算出牵引电动机的峰值功率和额定功率后,可以通过式(5)计算出牵引电动机的峰值转矩和额定转矩
由式(5)计算得:牵引电动机的峰值转矩Tmax=343.8 N ⋅ m,额定转矩Tc=191 N ⋅ m。
然后,由牵引电动机的峰值转矩计算出车辆的爬坡能力,验证上述匹配完成的牵引电动机是否满足要求,如图3所示。图3表明计算出的爬坡能力大于设计要求规定的性能指标,上述匹配完成的牵引电动机满足车辆的性能要求。
1.3 发动机/发电机量值的匹配设计
在增程式电动车进入增程模式行驶时,发动机/发电机用以供给稳态功率,以防止动力电池完全放电。对于发动机/发电机的设计,应考虑两种驾驶情况:
(1)长时间采用恒定车速的行驶情况,如在高速公路上的运行和在软路面上的越野行驶。要求车辆满足以高速公路上限车速(120 km/h)行驶的需要,此时发动机/发电机应有足够的功率支持这一车速的运行。在平坦路面上恒速行驶时,来自发动机的输出功率可表达为
式中,Pe为平坦路面上恒速行驶时来自发动机的输出功率,kW;ηt为传动装置的效率,取90%;ηm为牵引电动机的效率,取90%;ηg为发电机的效率,取90%。
将各相应参数代入式(6)计算得:Pe=29.8 kW。
(2)采用频繁的停车-起动模式的行驶情况,如市区内的车辆行驶。发动机/发电机所产生的功率应等于或略大于平均的负载功率,以保持动力电池稳定的能量储存。平均的负载功率可表示为
式中,Pave为市区工况的平均负载功率,kW;T为市区工况的总运行时间,s;dv/dt为车辆的加速度,m/s2。
以NEDC(New European Driving Cycle)循环、UDDS(Urban Dynamometer Driving Schedul)循环和US06(美国联邦试验规程e)循环为例,由表2可知,这些行驶循环中的平均功率是较小的,因此发动机功率为29.8 kW可以满足这些驾驶循环的需要。
然而,发动机理应供给更多的功率,以承载连续的非牵引负载,如灯光、娱乐、通风、空调、动力转向装置和制动增压等。综上,发动机需要产生约31 kW的功率才能满足要求。

表2 不同行驶循环中的典型数据
图4表明了发动机的效率图以及最佳效率运行点(点a),在该点处,产生了对应的31 kW的功率。可以看出,在点b处,最大的发动机功率约为74 kW。
可以确定:此发动机最大功率为74 kW(5700 r/min),最大转矩为145.6 N⋅m(3477 r/min);发电机的额定功率为31 kW(2193~5700 r/min),峰值功率为59 kW(2193~5700 r/min)。
图5所示的是发动机功率的另一设计。图中所设计的发动机运行点接近其最大功率,可产生所需的31 kW功率。
可以确定:发动机最大功率为37 kW(5700 r/min),最大转矩为73 N·m(3477 r/min);发电机的额定功率为31 kW(3000~6000 r/min),峰值功率为31 kW(3000~6000 r/min)。
比较这两种设计发现:相比第1种设计,第2种设计的发动机/发电机要小得多,虽然在增程模式下以120 km/h恒速行驶时,第1种设计油耗较小,然而在低车速或市区范围内行驶时,发动机的平均负载功率小得多,第 2种设计可能更加经济。故选第2种设计。
1.4 动力电池量值的匹配设计
对于增程式电动车来说,在全电力驱动模式下要求能发挥牵引电动机的所有功率,又因为此时发动机/发电机的输出功率为零,故而动力电池的功率容量为
考虑到需要承载连续的非牵引负载,令Pess=85 kW。
动力电池的能量容量取决于行驶循环和总体的控制策略。此次设计采用的是欧洲城市行驶循环,要求全电力驱动模式的行驶里程大于64 km。由于发动机/发电机的功率容量远大于平均的负载功率,因此,采用“恒温器”控制策略。
图6表明了实施“恒温器”控制策略的上述车辆在连续64个ECE(Economic Commission of Europe)行驶循环(约合64.7 km)中的动力电池输出能量的变化。模拟中,包含了再生制动。控制中允许动力电池的最大能量变动为9.46 kW⋅h。令 SOCtop=0.85,SOCbott=0.3,则动力电池的全部能量可以用式(9)进行计算:
式中,Ecap为动力电池的全部能量,为动力电池的最大能量变化值,kW⋅h;SOCtop和SOCbott为动力电池荷电状态的顶限值与底限值。
根据式(9)可得动力电池的全部能量为17.2 kW⋅h。为保证一定的富余量,令Ecap=17.28 kW⋅h。
2 仿真研究
将上述已经匹配好的各零部件参数输入到PSAT仿真软件中,选取“恒温器”控制策略作为仿真策略,分别对上述车辆的动力性(包括最高车速、加速时间和最大爬坡能力)和经济性(包括全电力驱动模式的行驶里程和电能消耗率以及增程模式下的油耗)后进行仿真分析。仿真结果见表3。

表3 增程式电动车动力性和经济性仿真结果
由上述仿真结果可知,所匹配设计的驱动系统能够满足整车的性能要求。在增程模式下行驶时,虽然有制动能量回收,但整车的燃油消耗率仍高达6.25 L/100 km,与传统车辆相比其油耗并不低。这是因为源于发动机的能量被两次转换(在发电机中,由机械能转变为电能;在牵引电动机中,由电能转变为机械能)后传递到终端——驱动轮。发电机和牵引电动机两者的低效率导致显著的损耗。
3 结 论
(1)根据文中所述的方法匹配设计的增程式电动车,经过仿真验证,能够满足整车的性能设计要求。
(2)增程式电动车不同于传统的串联式混合动力汽车,其较长的“纯电动行驶”里程和不低的“增程模式”油耗,决定了增程式电动车更偏向于纯电动车。
(3)在动力电池技术短时间内无法取得重大突破的前提下,增程式电动车一定程度上解决了纯电动车续驶里程无法与传统汽车相比的难题,可以作为过渡车型投入研发。
[1]余志生.汽车理论(第四版)[M]. 北京:机械工业出版社,2008.
[2]Mehrdad Ehsani,Yimin Gao,Ali Emadi. Modern Electric,Hybrid Electric,and Fuel Cell Vehicles Fundamentals,Theory,and Design Second Edition. CRC Press,2010.
[3]GB/T 19596-2004 电动汽车术语[S].
[4]GB/T 18385-2005 电动汽车 动力性能 试验方法[S].
[5]GB/T 18386-2005 电动汽车 能量消耗率和续驶里程试验方法[S].