一种自轴承电动机的结构及控制原理研究
2012-10-31潘建新周志雄
潘建新,周志雄
(1.湖南科技职业学院,湖南长沙 410004;2.湖南大学,湖南长沙 410082)
0 引 言
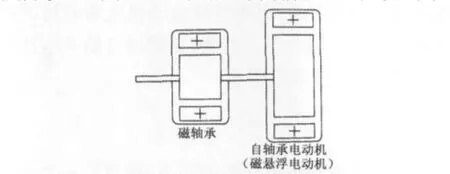
图1 磁悬浮自轴承电动机示意图
自轴承电动机由于使用磁轴承而不需要单独设计专门的机械轴承,而且磁轴承结构与交流电动机定子结构相似,人们通常把磁轴承中产生径向悬浮力的绕组(悬浮绕组)叠加到电动机的定子绕组(转矩绕组)中,它们产生一个整体磁场,通过控制该磁场可实现电动机转子的稳定旋转和悬浮。
应用最广泛的自轴承电动机使用两种旋转磁通:转矩绕组磁场采用与转子相同的极数来实现旋转控制,悬浮绕组磁场通过增加或减少2个磁极数(p±2)产生一个径向力[1]。这种形式的电动机设计的最大问题是控制两个不同旋转磁通比较复杂。下面对其控制原理进行分析。
1 结构原理
最普通的自轴承电动机利用p±2设计(p为转矩绕组磁场极数)。即除p个极磁通控制电动机外,还利用p+2或p-2磁通作为悬浮控制,在一侧增加磁通,而在另一侧减少磁通,从而控制径向力[2]。
图2为采用永磁式转子(p=4)的自轴承电动机示意图。
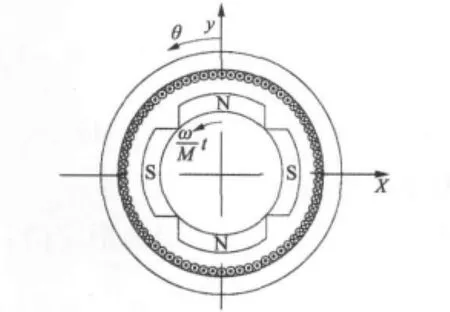
图2 四极永磁电动机坐标系统及工作原理图
假定转矩绕组磁场中产生旋转力矩的电流Im按下式计算:

式中:Im为电流峰值;ω为电流角频率;M为转矩绕组磁场磁极对数;θ为转子旋转机械角度;ψ为电流初始相位角。

而转子上永久磁铁产生的磁通密度Br可按下式计算:式中:BR为磁通分布的峰值,如图3所示。当转子处于定子中心,磁通分布和定子电流对称。因此,径向力是平衡的。
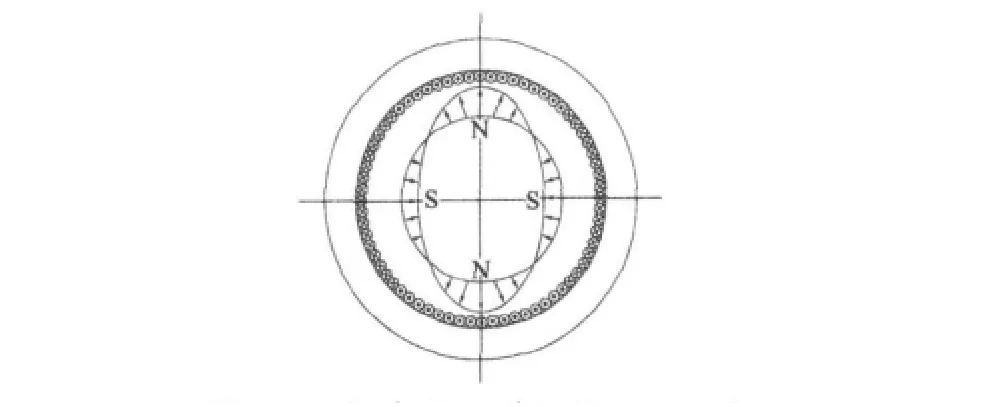
图3 四极永磁电动机的磁通分布
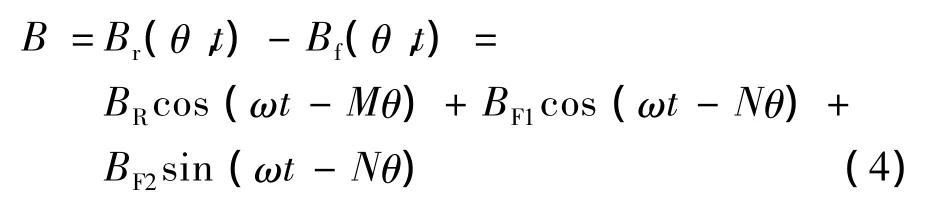
在式(1)的力矩控制电流基础上叠加一个悬浮控制电流即可实现悬浮要求[3]。考虑到悬浮绕组中电流产生的磁通Bf:

式中:BF1和BF2为磁通分布x、y方向的峰值密度;N为悬浮绕组磁场磁极对数。因此,气隙磁通B是式(2)和式(3)的合成。即:
为了让学生能够提升自己在数学方面的综合能力,教师可以为学生设置问题数学场景,让他们能够在思考生活问题的同时学习数学知识。而且,教师在提出生活场景的问题时,会提升学生参与数学知识学习的兴趣,从而让他们能够更加积极主动地参与到数学知识的自主探究中。教师可以利用生活情景为学生提出自主探究问题:如小红要买一件价值50元的商品,她现在已经存了15元钱,还需要存多少钱才够买这个商品?进一步教师可以将题目变为:你的一个朋友有15元钱,她想送奶奶一件生日礼物,利用报纸或超市的广告宣传单上的价格表,制订一个购买计划。使学生自行解决生活场景中的问题,能够提升他们的数学探究能力。
该磁通在θ方向无限小面积△S上产生径向力△F,△F可由下式计算:

式中:μ0为真空中的磁导率。
将B=Br-Bf代入上式,则θ=0方向的悬浮合力 Fy由下式给定[4]:
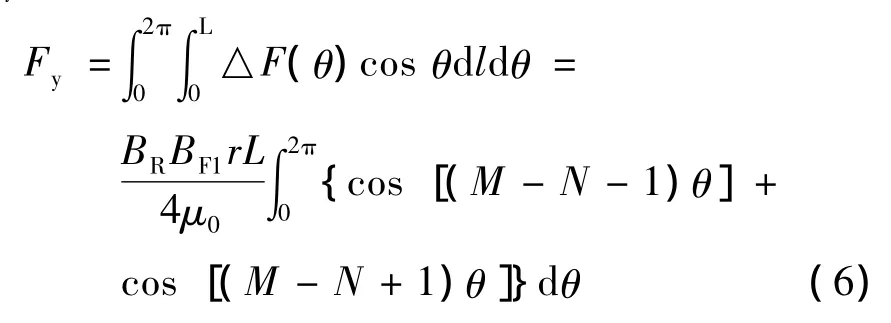
式中:L为转子长度,r为转子半径。
当M-N=±1时,式(6)变为恒定值:

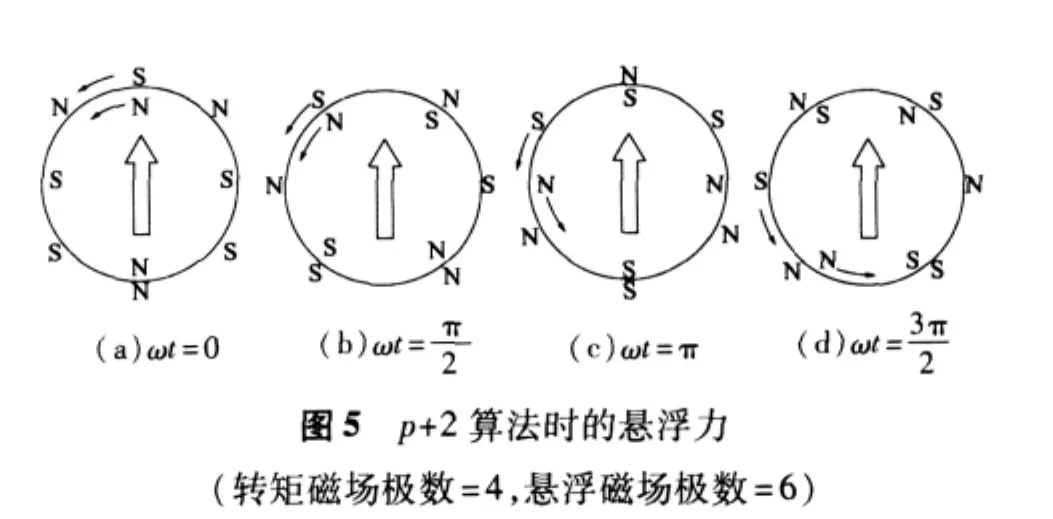
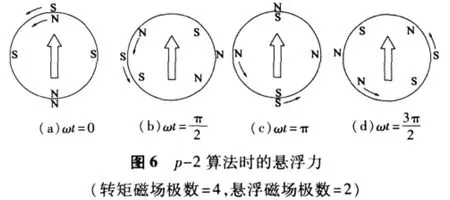
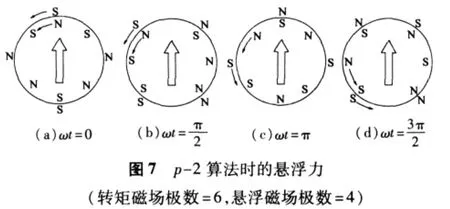
其解的示意图显示在图4、图5(p+2算法)以及图6、图7(p-2算法)中。
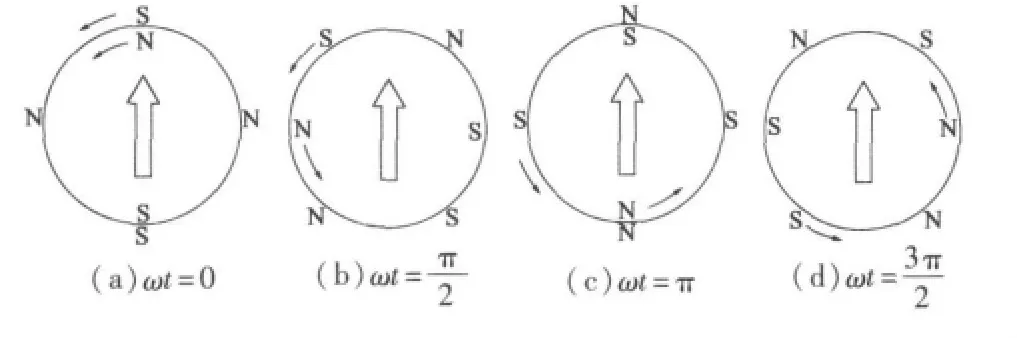
图4 p+2算法时的悬浮力(转矩磁场极数=2,悬浮磁场极数=4)
同样,通过式(5)可计算出则θ=90°方向的悬浮合力Fx:

因此,转子在径向的平面位置可以通过改变BF1和BF2的幅度来控制。
在分析自轴承电动机的控制原理时,我们假定磁通和电流都是线性的,而事实上磁性材料的磁通和电流都具有非线性特征,这将导致悬浮控制的不稳定[5]。同时,由于x方向和y方向轴承力之间产生不同的旋转磁通,也将导致电动机效率有所下降并产生不必要耦合[6]。因此,在设计自轴承电动机时必须充分考虑以上因素。
2 实验分析
为测试自轴承电动机的能力,构建了一个水平式实验装置,如图8所示。转子水平放置。由一个涡流型制动系统施加外部转矩,转子重力作为电动机的径向载荷。转轴的加载端由一个准磁轴承支撑,而自由端则装入所设计的自轴承电动机。
定子由8个带线圈的凸极定子近似,其中的电流由各自的功放独立控制。电动机转子直径为40.8 mm,宽度为35 mm,而磁轴承的宽度尺寸为25 mm,平均气隙为0.8 mm。
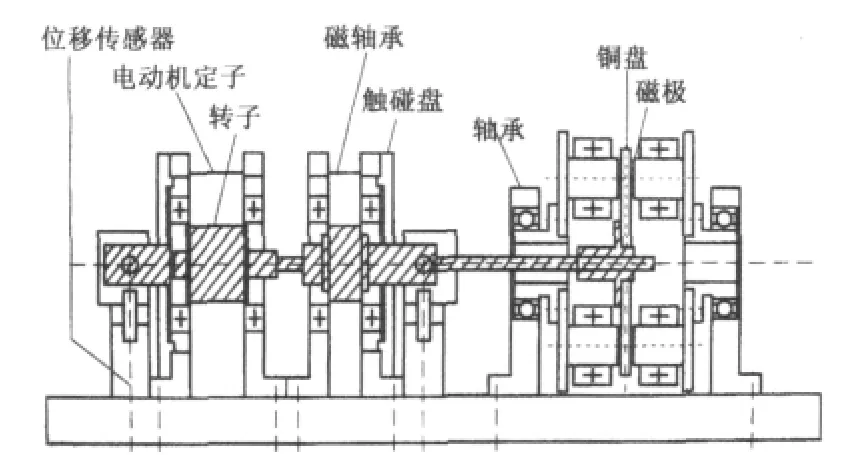
图8 实验装置示意图
所设计的电动机类似于传统的永磁同步电动机。利用表面永磁体宽度变化近似由式(2)计算的正弦磁通[7]。定子电流由两个不同频率的旋转磁通合成[7],根据以上理论分析,一个用于电动机转矩,另一个用于悬浮控制。
悬浮和旋转由一套DSP(数字信号处理器)控制。图9为其控制系统。
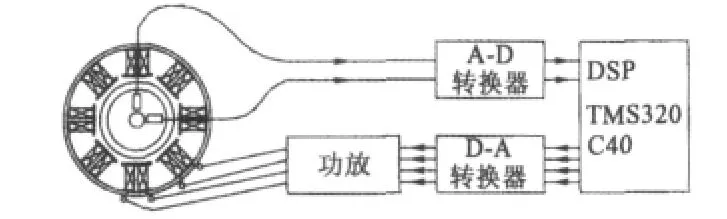
图9 数字控制系统
系统安装了4个气隙传感器,用来测量x、y方向转子位移。根据式(7)和式(8)的悬浮理论,定子悬浮电流近似出现在凸极位置,电动机电流近似出现在转子磁极位置。
基于所测量气隙位移,DSP依据电动机电流和悬浮控制电流,首先计算出每个线圈电流,然后,将悬浮电流和电动机电流叠加送入功放。悬浮控制算法是标准PD控制:

式中:KP、KD和 TD实验确定为 KP=2.1 A/mm,KD=0.007 As/mm,TD=0.1 ms。采样间隔 t=0.1 ms。
实验中我们使用两种永磁电动机转子:2极和4极。因此,利用p±2算法,可实现2极式和4极式两种形式的实验。实验的悬浮不平衡响应和承载力矩如图10~图13所示。
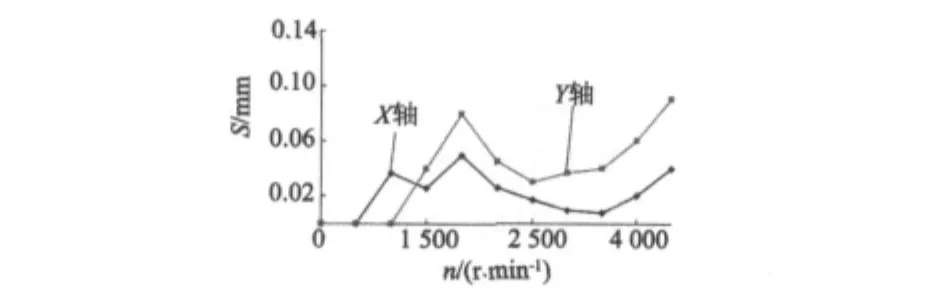
图10 不平衡响应曲线(2极永磁电动机,p+2算法)
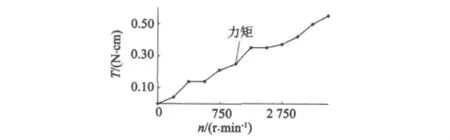
图11 载荷力矩曲线(2极永磁电动机,p+2算法)
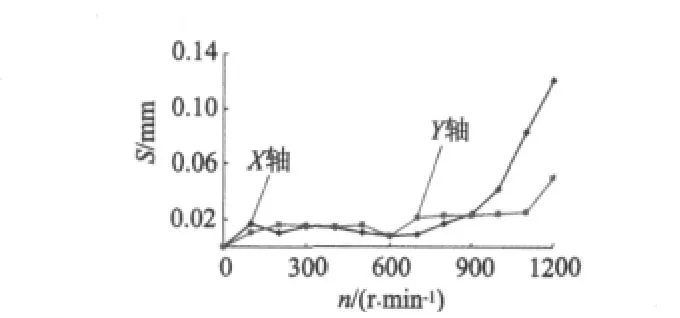
图12 不平衡响应曲线(4极永磁电动机,p-2算法)
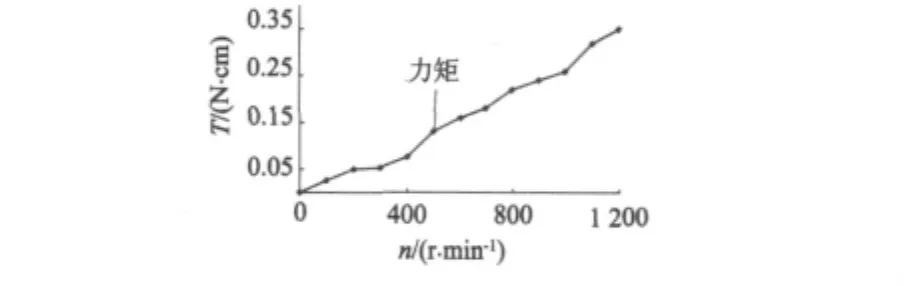
图13 载荷力矩曲线(4极永磁电动机,p-2算法)
实验过程中,以50 r/min的增量增加电动机磁场转速。转子达到稳定速度后,记录基础频率振动幅度和承载力矩。由于采用了涡流振动系统,负载扭矩随转速的增加而增加。我们看不出力矩控制和悬浮控制之间存在耦合,但是x方向和y方向的悬浮控制有轻微的耦合,这主要是由于将永磁体产生的磁通近似成正弦磁通的结果。
在p+2算法中,旋转和悬浮控制是稳定的。最大旋转速度达到4200 r/min,如图10所示,在p-2算法中,旋转力矩较弱。图13为其最终不平衡响应,相对于p+2算法情形,仅达到一个较低的最大速度1200 r/min。这主要是由于定子的磁通失真,明显地降低了效率。如果能减少磁通失真,可能获得更大的力矩和更高的速度。
[1]Bosch P N,Barletta N.High power bearingless slice motor(3 -4kW)for bearingless canned pumps[C]//Proc.of 9th Int.Symp.on Magnetic Bearings,Lexington,Kentucky,USA,2004.CD -ROM.
[2]Okada Y.Analysis and comparison of PM synchronous motor and induction motor type magnetic bearings[J].IEEE Trans.on Industry Applications,1995,31(5):1047 -1052.
[3]蒋成勇.NC机床磁悬浮电主轴控制系统研究.大连交通大学[D].2006:52 -58.
[4]景敏卿,刘祖军,虞烈,磁悬浮轴承数字控制系统设计及实现[J].机械科学与技术,2002(2):30-33.
[5]汪希平.磁悬浮轴承系统的参数设计与应用研究[D].西安交通大学,1994:61 -65.
[6]李宜达.控制系统设计与仿真[M].第一版.北京:清华大学出版社,2004:268-277.
[7]葛研军,蒋成勇,王军闯.磁悬浮推力轴承结构参数优化设计[J].大连交通大学学报,2006(4):1-3.
