有限转角力矩电动机转矩分析和优化
2012-10-31樊战亭刘卫国贺安超
樊战亭,刘卫国,贺安超
(西北工业大学,陕西西安 710072)
0 引 言
有限转角直流无刷力矩电动机是一种定子绕组通以直流电时,转子可在一定角度范围内直接驱动负载做快速运动和准确定位的伺服电动机。由该电机组成的伺服系统具有输出力矩大、能够在限定角度内精确定位、可靠性高等特点[1]。有限转角直流力矩电机位置伺服系统目前广泛应用于航空伺服阀[2]、自动控制、电气传动、机器人关节等领域[2]。文献[2-4]中有限转角力矩电动机的结构基本形式与普通永磁直流无刷力矩电机类似,即定子嵌放绕组,转子安放永磁极。本文针对一种精密焊接设备直接驱动器的需要,设计了一种直流有限转角无刷力矩电机,电机转子部分无磁极,并应用有限元软件Magnet对电机参数进行了优化,以提高输出力矩。
1 电机基本机构和工作原理
有限转角直流无刷力矩电机的基本结构形式如图1 所示。图中,θ1、θ2为旋转角度范围(±10°),以满足±8°的设计要求。Y轴为电机角度零位线,Ⅰ和Ⅱ分别θ1和θ2角的边界线。定子齿槽数Zs,分别在图中以1~18进行标示。极对数p=9,相邻定子齿上的绕组绕制方向相反,并依次相连接构成电机的整个绕组。
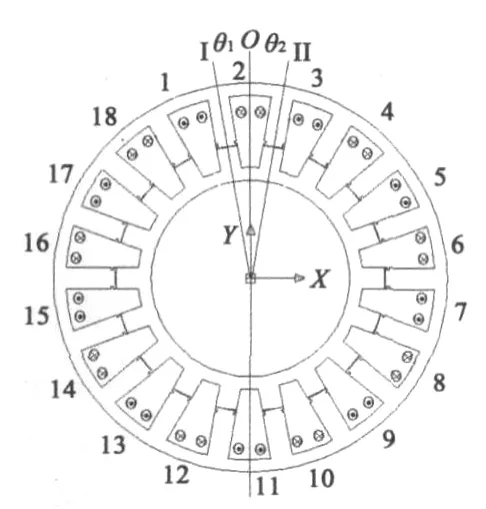
图1 电机结构剖面简图
电机的工作原理是根据磁力线趋向于走过最小阻抗路径的特性,当转子相对图1定子零位有左右偏转角度时,因气隙磁阻变大而产生回复力矩,从而使转子转回到零位。
2 电磁转矩
为了易于分析,先研究图2位置一对定子和转子齿所产生的力矩。图2中O1、O2分别为定子和转子齿的中心线,θm为定子、转子齿宽对应的机械角度,δ为气隙宽度。根据机电能量转换原理[5],当转子在从零位位置转动了角度θ,气隙中的磁共能变为W'。设磁场为线性磁场,则电机的静态转矩可按下式求出:
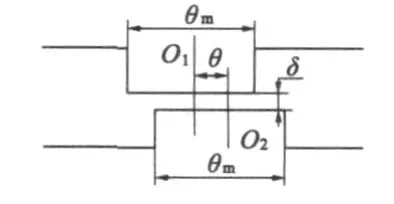
图2 电机定转子位置图
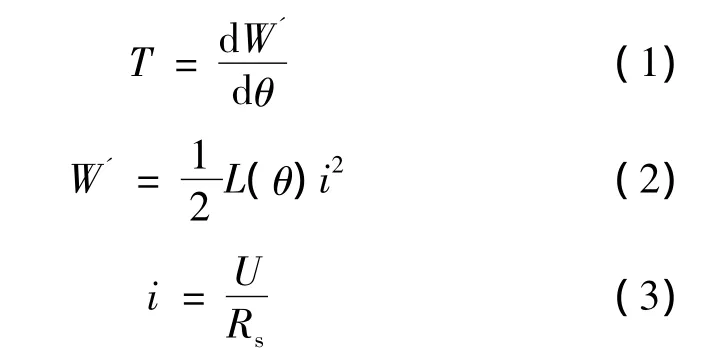
式中:W'为气隙磁共能;U为定子所加直流电压;i为定子电流;Rs为定子电阻;L(θ)为线圈电感,随转子转动角度位置而变。线圈电感与转子齿和定子齿的相对位置有关,当转子齿与定子齿对齐时(图1位置),电感最大;转子齿与定子槽对齐时,电感最小;其它位置介于两者之间。若略去气隙磁通的高次谐波和铁心磁阻,假设铁心磁动势都消耗在定子和转子共同组成的空气隙中,L(θ)能够表示如下:

式中:N为绕组匝数;l为轴向长度;δ为气隙长度;r为气隙平均半径;s为定子和转子共同包围的空气隙面积。
由式(4)、式(2)和式(1)可得一对定转子之间的静态转矩:

整个电机的静态转矩Tz:

式(6)中负号表示转矩的作用方向为试图将转子轴线拉向与定子轴线对齐的位置,在该位置处,线圈电感具有最大值。在电流i为定值时,电机的静态转矩为恒定值。实际上由于铁心磁阻的存在、漏磁和电机结构的对称误差,转矩在零位和θm会有由零到TZ定值的之间过渡过程,在中间阶段转矩也会出现一些波动。在电机设计阶段,可以使用考虑到电机非线性磁材料的有限元软件包具体确定电机的输出转矩。
3 电机有限元软件设计与优化
3.1 有限元软件Magnet简介
本次设计计算采用的磁场有限元分析软件为Magnet。该软件为加拿大Infolytica公司的产品,已经广泛用于航空航天、汽车、消费电子产品、电气产品等领域,为高性能的机电产品进行设计与开发,可显著节省设计时间和成本。
软件的特点主要有以下几个方面:具有直接的CAD接口,可导入/导出多种文件类型。先进的材料属性,可以根据需要定义材料的多种电、磁、热的线性或非线性属性。支持用于仿真负载与驱动的电路建模,如换向器电机的运行、无刷电动机驱动等。自适应网格剖分功能。有限元软件MagNet的基本操作步骤可分为前处理、求解、后处理三个部分。前处理包括建立几何模型、编辑和设定材料、设置线圈和电路连接、设置边界条件及剖分网格参数等。
3.2 设计过程及优化
设计过程是在有限元分析软件Magnet下设定电机模型,通过软件求解计算出电机的矩角特性,然后分析选出性能较好的模型,再进一步优化,得出最终电机结构参数。图3是电机在 Magnet软件中设定材料后的电机模型,图4是电机模型经过有限元剖分后的图形。

图3 Magnet设定材料的电机模型

图4 电机模型的剖分结果
电机结构中,几个重要的参数为齿数、齿宽、空气隙大小。在仿真中对每一组的仿真都只改变其中一个参数,同时对绕组情况根据结构参数进行相应设定,一步一步通过优化选取得到一个比较理想的结构。
(1)齿数。在齿宽一定时,选用齿数为16、18,进行偏转角度和输出力矩关系的计算,进行绘图。
从输出力矩考虑,18个齿的结构输出力矩较大,效果更好。在软件仿真计算中,为了后处理程序更易于处理,把电机设定转角设定从零角度开始按正方向旋转。由于电机的对称性,即图5中偏转角度10°~20°的回复力矩与 -10°~0°偏转角度对应的回复力矩相同,实际电机在正常工作情况下,只能工作在-10°~10°偏转范围内。其它图形中偏转角和回复力矩的关系图中也同样处理。

图5 16齿时偏转角和力矩的关系
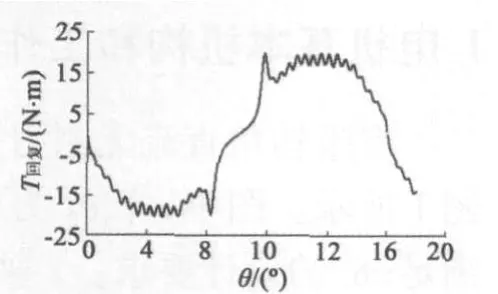
图6 18齿时偏转角和力矩的关系
(2)在齿数为18时,选取齿宽分别为9 mm、9.4 mm进行计算和绘图。
图7在偏转0.5°时的输出力矩要比图8偏转0.5°输出力矩大,图7中峰值力矩也比图8中要大,因此选择齿宽为9 mm的结构。
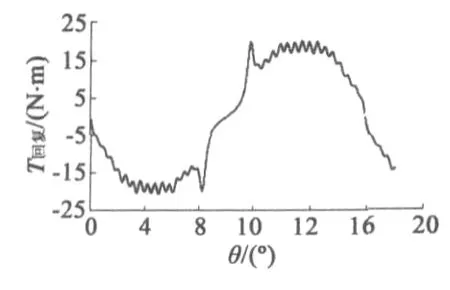
图7 齿宽9 mm偏转角和力矩的关系
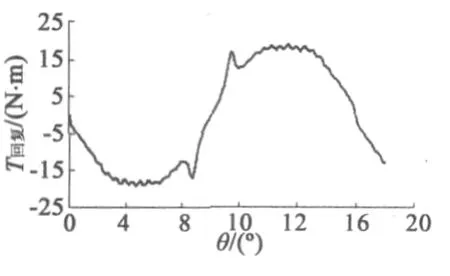
图8 齿宽9.4mm偏转角和力矩的关系
(3)气隙选取。在齿宽、齿数确定的情况下,选择气隙宽度分别为 0.15 mm、0.2 mm、0.3 mm、0.4 mm进行偏转角度和输出力矩关系的计算和绘图。
根据图9到图12可得表1的数据,从表1可以看出,在偏转0.5°时,气隙0.3 mm情况下输出力矩最大,更加满足电机堵转大于等于5 N·m的要求,选气隙为0.3 mm比较合适。

图9 气隙0.15 mm偏转角和力矩的关系

图10 气隙0.2 mm偏转角和力矩的关系
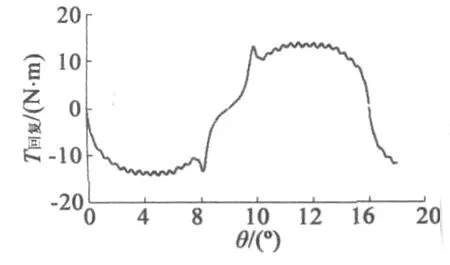
图11 气隙0.3 mm偏转角和力矩的关系
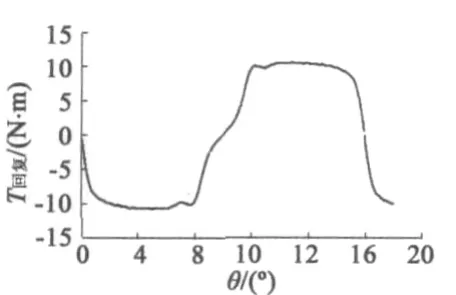
图12 气隙0.4 mm偏转角和力矩的关系

表1 不同气隙下的输出力矩
综合考虑上述计算结果、电机制作的工艺性以及电机的强度问题,我们决定采用定子轭和定子齿分离的方案,定子轭材料选用较为硬的10号钢,定子齿材料仍选为电工纯铁DT4C。齿数18,齿宽 9 mm,气隙0.3 mm,最终得出偏转角和输出力矩的关系如图13所示。

图13 偏转角和力矩的确定关系
从图13可得到偏转0.5°的力矩为5.84 N·m,偏转8°的力矩为9.71 N·m,峰值力矩为11.65 N·m。
从图5~图13也可以看出,在偏转角度+1°~+8°、+12°~ +19°(对应 -8°~ -1°)时输出力矩与式(6)推导结果是相符的。
4 样机测试结果
该样机已成功配套用于精密焊接设备。样机的主要测量技术指标:电机加载峰值堵转直流电压27 V时,稳定堵转电流小于6 A,顺时针、逆时针偏转0.5°时输出力矩均为 2.95 N·m;偏转 1°时均为5.1 N·m;偏转 4°时分别为 11.1 N·m 和 11.2 N·m。电机在稳定转角范围-8°~+8°,满足性能指标中输入为峰值电压时输出力矩大于等于5 N·m的要求。力矩电机在顺、逆方向受到较大冲击力时,偏离原位,在回复力矩作用均能可靠回到定子零度位置。在没有外部力矩作用时,能较稳定地工作在定子零位±0.25°的精度范围内。
样机的测试结果证明,本文所提出的电机结构形式、电磁转矩计算方法和Magnet软件计算结果是正确有效的,并可满足精密焊接设备对有限转角力矩直接驱动的技术要求。
5 结 语
有限转角无刷力矩电机具有出力大、体积小、重量轻、可靠性高等优点,可满足精密焊接设备直接驱动器使用要求,并已成功配套应用在精密焊接设备中。该电机在直流有限转角转矩驱动中有着较为重要应用价值和发展前景。样机性能优良,验证了本文所提出的设计方法。
[1]Murali Krishna P,Kannan N.Brushless DC limited angle torque motor[C]//Proceedings of the IEEE International Conference Power Electronics,Drives& Energy for Industrial Growth,PEDES.New Delhi,India 1996:511 -516.
[2]刘卫国,马瑞卿.有限转角无刷力矩电机设计方法研究[J].西北工业大学学报,2002,20(4):15 -518.
[3]曹春,杨素香,黄宇峰,等.有限转角电动机介绍及主要公式推导[J].微特电机,2008(5):16-17.
[4]宋恩哲,赵华伟,孙军,等.有限转角力矩电机作为柴油机调速执行机构的设计研究[J].哈尔滨工程大学学报,2008,29(8):809-813.
[5]Fitzgerald A E,Charles Kingsley Jr.电机学[M].刘新正,译.第六版.北京:电子工业出版社,2008:96-101.
