非接触式汽车AMT挡位传感器性能试验研究
2012-10-25周炜冬方锡邦张肖康周守元
周炜冬, 方锡邦, 张肖康, 周守元
(1.合肥工业大学 交通运输工程学院,安徽 合肥 230009;2.合肥邦立电子股份有限公司,安徽 合肥 231202)
挡位传感器是安装在汽车机械式自动变速器AMT(Automated Mechanical Transmission)上的一种角度传感器,主要应用在汽车底盘的电子自动变速控制系统中[1]。汽车AMT控制系统通过挡位传感器提供的电动机转动位置信息实施精确的运动控制,实现变速器拨叉轴的移动换挡和摆动换挡以及离合器的接合。传统的挡位传感器大都属于接触式挡位传感器,由于触点频繁滑动,部件容易产生磨损,无法保证信号输出的精确性与稳定性,输出线性度难以控制,使用寿命受到限制[2]。
文献[3-4]介绍了2种实用新型非接触式车用挡位传感器,是近年来挡位传感器领域的最新研究成果,已经成功应用于上汽通用别克汽车的凯越、君悦等车型上。
本文中的非接触式汽车AMT挡位传感器由国内某汽车电子企业自主研发,是一种性能优良、精度高、可靠性强的磁电式角度传感器,仅从传感器外部引出电极,采用完全无接触的角度旋转方式,大大延长了使用寿命。传感器内部应用了高精度的霍尔芯片和具有特殊磁路结构的磁性材料,保证了测试的准确性。同时,通过开发的基于PC机的虚拟仪器系统,即汽车AMT挡位传感器性能测试系统,利用在线编程2点标定方法,采用软件方式进行了试验研究。
研究表明,该传感器可解决传统挡位传感器难以实现的大角度稳定测量问题,具有良好的线性输出特性。
1 传感器设计
1.1 传感器结构
传感器结构如图1所示,整个挡位传感器由霍尔芯片、转轴、导磁片、磁铁等组成,磁铁和导磁片固定在转轴上并装入壳体下腔,霍尔芯片从壳体上腔装入,芯片的引脚和壳体上的接插件端子焊接在线路板上。

图1 传感器结构示意图
1.2 传感器工作原理
传感器基于霍尔效应原理制成,如图2所示。霍尔效应指当一个有电流通过的霍尔半导体片(霍尔基层)置于磁场方向和电流方向垂直的磁场中时,在霍尔半导体片与电流方向垂直的横向侧边上就会产生一个微电压,称为霍尔电压,其大小可表示为:

其中,VL为霍尔电压;RL为霍尔常数;IC为偏置电流;H为磁场强度;d为半导体材料的厚度。
对于一个给定的霍尔元件,当电流一定时,产生的霍尔电压取决于磁场强度的变化。
本传感器安装在汽车AMT的选挡轴、换挡轴和离合器转轴上,以选挡轴、换挡轴和离合器转轴带动传感器转轴、磁性材料和导磁片同步转动,随着霍尔芯片在磁性材料和导磁片中的相对位置发生改变,霍尔芯片感应面的磁场强度也发生改变,从而利用霍尔效应原理输出相应的电压信号。

图2 霍尔效应原理图
2 性能测试系统平台的搭建
2.1 系统总体结构
所搭建的测试系统总体结构如图3所示,主要包括计算机、标定检测仪、数据采集卡(DAQ)、信号调理电路和电动机等。其工作原理是:系统启动后,电动机带动皮带盘齿轮的齿圈转动,运行安装在PC机上的标定程序,发出标定指令后,传感器的转轴开始旋转,所转过的角度通过传感器感知后,在其上产生感应电压,此感应电压作为模拟信号,经信号调理电路调理放大,最后通过数据采集卡转换成数字信号后输入到计算机中进行处理和显示。另外,计算机也可根据试验人员的要求,通过数据采集卡来控制变频器的输出频率,从而实现电动机转速的调节。
该系统采用NI(美国国家仪器)公司M系列高速数据采集卡PCI-6220。该卡提供16路模拟输入通道,16位分辨率,单通道1.25M和多通道1.00M采样频率,±10V24条数字I/O线(其中8条为1MHz定时相关DIO线)和2路32位计数器/定时器。同时,该系统采用东方马达公司αSTEP ARL系列内藏控制器型步进电动机实施运动控制,这是一种小型高转矩电动机,采用独创的闭环控制系统,具有优越的加速性和响应性,可实现信号的高精度定位,效率高,可靠性强。

图3 系统总体结构
2.2 系统程序设计
该性能测试系统由在线编程标定和性能测试2个部分组成,在线编程标定部分采用Micronas公司的PC825(V2.21)软件进行编程,选择“Two-Point Calibration”,即2点标定,并将相关标定信息写入传感器芯片。测试部分采用Lab-VIEW 2009[5]软件作为开发工具,利用面向对象的方法进行模块化设计,主要包括以下几个模块。
(1)参数设置模块。主要设置采集通道、采样频率、数据保存路径、按钮等,为数据采集和保存做准备。
(2)数据采集记录模块。该模块实现了在传感器转轴转过的每一个角度点处,读取采集卡采集到的传感器输出电压值,并将采集到的数据保存在PC机上。
(3)数据处理模块。实现将上述测量的数据进行计算和处理,得到传感器的静态特性指标,并将拟合的结果保存备用。
(4)显示模块。该模块可实现试验结果在前面板的显示,并可以显示状态信息、线性度幅值等。
系统初始化后进行在线编程标定。标定时,首先设置好各项参数,等待数据采集命令。其次在选取的2个标定点处记录下标定值,并采集这2点处传感器的输出电压值。随后,进行传感器性能测试,包括自动测试和手动测试2个模式。最后,将测量数据进行处理,在屏幕上显示传感器特性曲线图,并保存结果。软件流程如图4所示。

图4 软件测试流程
2.3 系统功能设计
本传感器可以实现0°~105°的大范围角度测量,采用的霍尔芯片具有可编程功能,通过编程来控制模块的线性输出特性。同时,采用对霍尔芯片的在线软件编程技术,能够有针对性地对由环境、温度等因素而引起的干扰、波动及漂移进行补偿和抑制,使测量结果更加精确。由于本传感器需要安装在自动变速器上并应用于实车运行中,在极限温度、不同工况交替变化、油污、振动等恶劣环境下具有较强的可靠性。
标定结束后,通过该性能测试系统的显示模块来显示传感器的输出特性,主要包括:① 显示挡位传感器角度电压曲线、线性度拟合曲线和此时传感器的标定值;②显示线性度幅值的最大值和最小值;③ 显示相关状态信息。另外,通过数据处理模块,可以实现试验数据结果的保存、读取和打印功能。
3 性能试验研究
3.1 传感器基本性能
传感器基本性能见表1所列,其中测量角度允许有±0.2°的误差。传感器理论输出特性如图5所示。
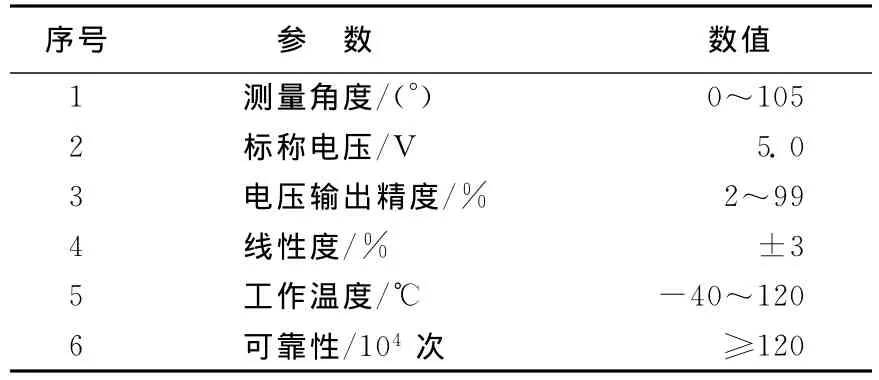
表1 非接触式汽车AMT挡位传感器基本性能

图5 传感器理论输出特性
3.2 试验内容及方法
为了得到传感器的输出特性,首先要对传感器进行编程。由于传感器是批量生产的,不同传感器内部的磁性材料存在内在差异,如磁场强度、磁路结构等。同时,传感器在组装完成后也存在机械偏差,无法保证每个传感器的输出参数都相同,所以本试验采用在线编程方法,当传感器组装完成后,针对每个传感器的内在特点和差异性进行独立的现场编程,保证了传感器间输出参数的统一。编程结束后,必须要对传感器进行标定[6]。本文采用2点标定方法,依据2点确定一条直线的原理,直接通过性能测试系统进行标定,利用率高,可以实现数据的自动实时分析,标定原理如图6所示。

图6 2点标定原理示意图
由于测试系统存在一定的系统误差,为了使传感器具有良好的线性度,这里采用补偿法来减小系统误差,其基本原理是[7]:在测量某一被测物件时,使定值误差的影响在2次读数所对应的测量状态中正好方向相反,在取2次读数的平均值作为被测量的测量结果时,定值系统误差对被测量的影响便相互补偿而消失。
选择一只传感器作为试验样本,并通过夹具固定在试验台上。标定时,根据输出要求得出Nominal Vout1(起始角度额定电压值)和Nominal Vout2(末角度额定电压值)2个角度点的电压值(0.562V和4.488V),并计算出钳位低点和钳位高点的比例系数填入编程界面中,然后通过数据采集卡分别对起始角度(Nominal Vout1对应的角度点)和末角度(Nominal Vout2对应的角度点)的磁场强度进行采样,得出以上数据后,运行标定程序即可得到标定值,标定结束后软件界面如图7所示。
最后,通过通信端口把标定值写入传感器内部以完成通讯编程。此时,传感器就具有了在2个编程标定的磁场点输出相应电压值的功能,因为在这2个磁场点之间的磁场强度是均匀变化和线性的,所以传感器内部芯片在这2个磁场点间的输出电压也是均匀变化和线性的。标定结束后,通过电动机带动齿轮上的齿圈转动,在传感器上产生感应电压信号,通过数据采集卡输入到计算机中进行处理,并显示传感器的输出特性。
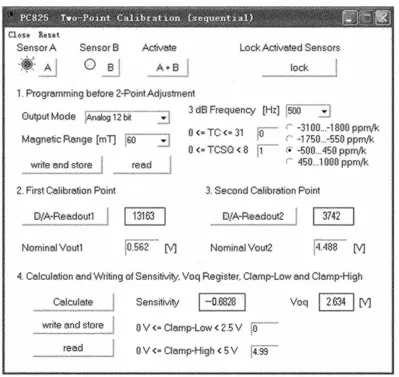
图7 传感器2点标定界面
3.3 结果分析
(1)按照上述试验方法选取50只传感器进行了试验,由于传感器间存在差异性,不能保证所有的传感器具有相同的输出特性,经过实际测试,在误差允许范围内,可以认为这50只传感器的输出特性基本一致,均达到设计性能要求。随机选取一只传感器作为数据样本,得出传感器转轴转过的角度和其对应的输出电压部分数据,见表2所列。

表2 挡位传感器性能测试部分实验数据
程序将每次测试的数据以电子表格的形式存储于计算机中,便于随时查询。
(2)传感器各项参数计算结果和拟合曲线显示于前面板,如图8所示,其中上半部分为角度电压曲线图,下半部分为线性度曲线图,参数计算由计算机实时完成。
从图8中可知,传感器的线性度曲线有抖动和锯齿,并不是光滑的,这是由测试系统自身存在的系统误差和所处的测试环境中有一定成分的高频干扰信号所导致的[8-9]。

图8 传感器性能分析前面板
(3)将本系统中的电动机改为带有编码器的普通开环控制系统步进电动机,重新对传感器进行测试,测试后传感器各项参数计算结果和拟合曲线如图9所示。通过对比可知,若采用开环控制系统的步进电动机,传感器的线性输出特性和线性度较差。

图9 采用开环控制系统控制的传感器性能分析前面板
(4)为了验证环境因素对挡位传感器的影响,通过该性能测试系统对传感器进行了试验。取2只传感器,其中一只浸入质量分数为5%的盐水中72h,另一只承受不同方向由喷嘴喷出的水的冲击若干次,随后把2只传感器分别安装在试验台上并用夹具夹紧进行测试,传感器输出特性如图10、图11所示。

图10 浸入5%的盐水中72h后传感器输出特性

图11 承受不同方向由喷嘴喷出的水的冲击后传感器输出特性
另外,在2只传感器上分别吹入粉尘和铁屑后进行测试,其传感器输出信号的情况如图12、图13所示。
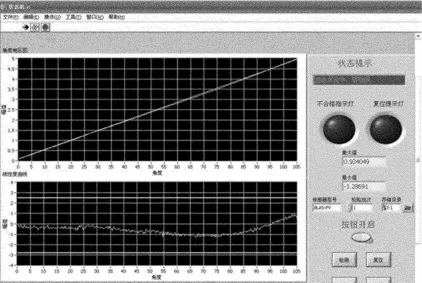
图12 吸入粉尘后传感器输出特性

图13 吸入铁屑后传感器输出特性
从图10、图11可知,挡位传感器的主要性能受浸入盐水中和承受水的冲击影响不大。从图12、图13可知,挡位传感器主要性能受粉尘因素影响不大,但铁屑对挡位传感器的正常工作影响较大。当传感器粘上铁屑时,传感器实际角度电压曲线偏离理论曲线较大,线性度幅值在负方向上明显变大,已经超出理论幅值的最小值。由于当传感器粘上铁屑时将影响AMT的正常工作,所以在使用过程中应避免出现类似情况。
4 结束语
本文通过开发汽车AMT挡位传感器性能测试系统,对挡位传感器进行了试验研究,对传感器的各项性能进行了测试。试验结果表明,利用霍尔效应制成的非接触式汽车AMT挡位传感器性能优良,对环境的适应性较好,在大多数环境下能够精确、快速地完成任务,能够满足实际汽车AMT系统的需要,可广泛应用于自动变速器及其他汽车相关领域。
[1] 刘延东.汽车自动变速器构造与原理解析[M].北京:机械工业出版社,2010:22-30.
[2] 张 珂,杨其华,李 冰,等.基于霍尔器件的非接触式角度传感器研制[J].传感技术学报,2008,21(6):981-984.
[3] 程 捷,陈 雁,王春健.非接触式数字信号档位传感器:中国:200910132226 6[P].2009-11-11.
[4] 李占江,任 钢,张 烁,等.霍尔档位传感器:中国,200920041348.x[P].2010-02-17.
[5] 林 静,林振宇,郑福仁.LabVIEW虚拟仪器程序设计从入门到精通[M].北京:人民邮电出版社,2010:392-405.
[6] 刘珂琴,潘雪涛.LabVIEW在测量装置静态特性标定中的应用[J].现代测量与实验室管理,2008(3):6-8.
[7] 陈功振.定值系统误差的判断及消除方法[J].计量技术,2002(8):47-48.
[8] 孙 骏,陈彦夫.汽车ABS轮速传感器性能测试系统的研究[J].汽车工程,2007,29(18):698-699.
[9] 陈 杰,张崇巍,孔慧芳.电控液力自动变速器控制单元的设计[J].合肥工业大学学报:自然科学版,2010,33(10):1488-1492.
