PowerMILL Robot Interface离线编程系统
2012-10-23王振江
王振江
(Delcam(中国)上海办事处,上海 200070)
近年来机器人在世界上很多国家都逐渐得到应用,鉴于人工智能技术尤其是仿生技术还不太成熟,机器人的应用主要还是集中在工业生产制造领域。包括我们中国在内的不少先进制造企业也陆陆续续引入了工业机器人,机器人的诸多优势已得到各行各业的广泛认可。将机器人引入生产流程的制造商,绝大部分都看到了产能与效率的显著改观。不久前,国际机器人联合会(The International Federation of Robotics,IFR)经调查得出制造商投资机器人的10大理由,这10大理由包括降低运营成本、提升产品质量和一致性、改善员工工作条件、扩大产量、增强制造柔性、减少原料浪费、提高良品率等。
多达6轴及以上的Robot具备了更大的加工自由度,适合复杂零部件的加工;Robot对场地的要求比较低,对恶劣环境的适应性更强,特别适合高噪声、高粉尘、高温、有毒、寒冷和核放射等对人体危害较大的恶劣环境;Robot的“关节臂”比较长,也非常适合大型零部件的加工。
Robot设备目前被广泛应用于:
(1)加工:石材和木材等材料的雕刻、模型加工(泡沫、树脂……);
(2)剪切:使用铣削刀具、专用刀具、喷水器等修剪很多种类的材料;
(3)钻孔:对很多种类的材料进行快速钻孔;
(4)焊接/喷涂:等离子切割、激光切割、电镀、喷涂;
(5)测量:非破坏性验证量测;
(6)搬运、装配等等其他众多场所。
英国Delcam软件公司在加工制造领域提供了高端的PowerMILL、PartMaker、FeatureCAM、ArtCAM及DentMILL等软件,分别应用于各种制造领域。该公司在最近几年还推出了基于PowerMILL平台的工业机器人编程软件PowerMILL Robot Interface,这款软件最近几年在西方发达国家已经得到了广泛的应用,解决了Robot机器人自带编程系统对于复杂程序尤其是铣削切割程序处理能力略显不足的问题,能够进行机器人的离线编程,对于机器人的控制技术方面有着极为重要的意义。
PowerMILL Robot Interface支持目前世界上主流的 Robot设备,比如:FANUC、ABB、KUKA、STABLI和 MOTMAN等著名的机器人,也可以根据需求定制不同的Robot编程系统。
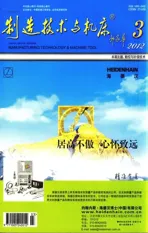
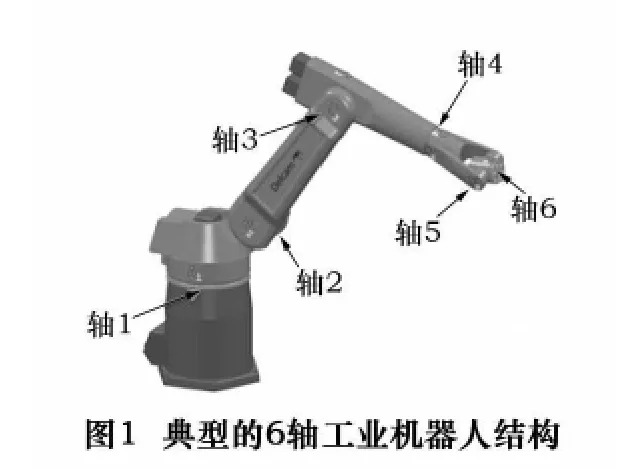
图1是一个6轴的典型Robot模型,PowerMILL Robot Interface的离线编程流程如图2。
下面通过一个实例来简要说明PowerMILL Robot Interface的离线编程。
(1)编写轨迹路径:加载项目文件“DemoToolControl1”到 PowerMILL Robot Interface软件,范例文件可以在软件安装后的目录找到:C:Program Files(x86)DelcamDelcam PowerMILL Robot Interface 2012(x.x.xx)LibraryProjectsDemoToolControl1,见图3(可以看到该项目文件中已经存在了2个轨迹,因为刀具路径轨迹的轨迹编制比较简单,基本上和PowerMILL软件是相同的,鉴于篇幅限制在此不做详述)。
(2)选择轨迹路径:左侧边栏(图3)激活刀具路径Knife路径。

(3)选择Robot机床:从右侧边栏顶端选择“Robot”,可以看到默认的库里面已经有一些品牌(FANUC、ABB等)的Robot在机床库中了,在这里我们鼠标左键双击选择Delcam-6X-Knife机器人设备。这台设备已经装载了“扁形”的切割刀头。
(4)设定工件及机床位置:在“Simulation”状态下,选择图标使Robot设备初始化到缺省位置。
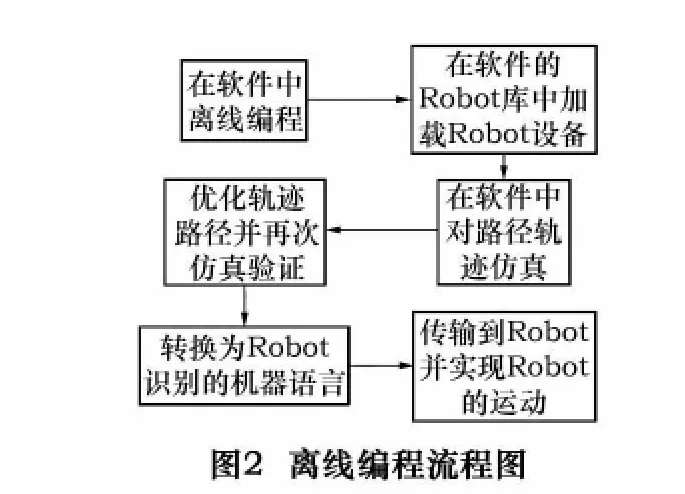
(5)仿真轨迹:点击“Play”按钮,开始仿真。观察仿真状态,放大后见图4。从图4右图可以明显看到刀具过切到工件内部区域,需要进行优化调整轨迹。
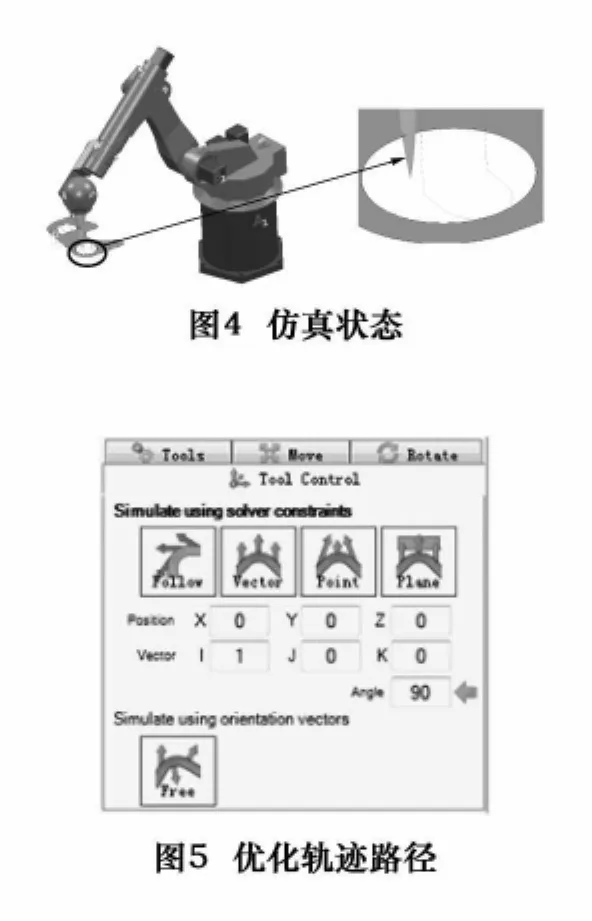
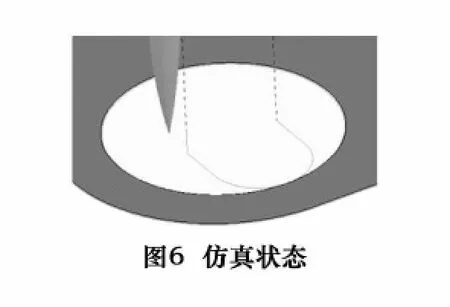
(6)优化轨迹路径:选择“follow”图标,并设定相关矢量参数为1、0、0及角度为90°(见图5)。再次按照上述第4步进行仿真。观察仿真状态,放大局部后见图6,可以明显看到“扁形”刀具已经和工件的轮廓完全相切,解决了之前的“过切”现象。

(7)记录轨迹路径到文件:点击“回到起始点”按钮,点击“记录仿真”按钮,并根据弹出窗口存储1个*.robsim文件到硬盘上。继续上述第5步的过程进行仿真,仿真结束后点击“停止按钮”。
(8)转换到Robot能够识别的语言:按照图7设置,并点击“Write robot program”按钮写入。
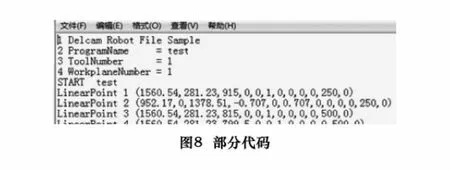
(9)检视编译后的语言并传输给Robot:用记事本打开得到的文件,内容如图8(仅截取了部分代码)。
鉴于篇幅所限,对于机器人运动轨迹路径的编修优化还有许多没有和大家分享,通过Delcam公司的PowerMILL Robot Interface编程系统可以非常便捷地对机器人程序进行离线编写与优化。
PowerMILL Robot Interface的特点:
(1)软件离线编程,编程更高效;软件易学易用,具有人性化的操作界面;可控性极强的后编辑能力,容易优化各个轴的运动;可以使用标准化的模板进行编程、标准化的刀具库管理系统,让车间的管理更容易实现标准化。
(2)支持机器人定位换刀功能;支持机器人装卸、搬运等定点运动功能、支持机器人弧焊和激光焊等焊接功能;支持机器人发泡取件、火焰切割、注塑取件及水刀切割等;支持机器人对复杂零件的铣削处理。
(3)离线编制的程序可以直接被机器人读取采用。
(4)真实模拟实际工作环境。
Delcam的离线编程系统使得技术人员对工业机器人的控制变得轻而易举,特有的离线和仿真技术帮助我们脱机编制优化的程序,减少现场验证等待时间,减少出错及不必要的风险,降低安全隐患。