基于方向滤波的指纹图像增强算法的研究
2012-10-18杨秀坤
张 彤,杨秀坤
(哈尔滨工程大学信息与通信工程学院,哈尔滨150001)
近年来,在指纹采录过程中,由于采集器的本身缺陷,人为因素等,采集到的指纹图像有10%左右是低质量指纹图像,为了保证指纹识别的有效运算,指纹增强已经是必不可少的关键一步[1-2].
方向滤波是一种非常常用又有效的方法,它是依据指纹图像特点而设计出来的[3-4].方向滤波的主要特点是使用与指纹局部方向一致的滤波器进行滤波,使指纹纹线方向的点得到增强,随机噪声得到消弱,指纹纹线平滑连续.由于指纹纹线方向是缓慢变化的,所以要涉及多个方向的滤波器,不同的方向选用不同的滤波器.基于方向滤波的指纹图像增强算法包括两个最关键的步骤就是指纹方向图的计算和方向滤波器的设计[5-9].
本文利用梯度法求取指纹的方向图,并对梯度法进行了一定的改进,得到了效果更好的指纹方向图.在滤波器的设计上,利用方向滤波器原则设计出水平方向滤波器,再对它进行旋转插值得到其他方向上的方向滤波模板,并提出了旋转溢出问题和解决方法.并且对每一种方法的增强结果作出了分析和评价.
1 理论分析与设计
1.1 基于方向滤波的指纹图像的增强
方向滤波增强算法流程图如图1所示.算法主要步骤和目的是:

图1 方向滤波增强算法流程图
1)图像的正规化:目的是为了消除传感器本身的噪声以及因为手指压力不同而造成的灰度差异.
2)方向图的求取:指纹纹线是指纹的一个重要特征,它的纹理性和方向性具有极其重要的意义.因此,要使低质量的指纹图像预处理后能获取清晰稳定的脊线特征图,提取指纹图像的方向信息——方向图是必不可少的一步.本文应用改进的梯度发求解方向图,并得到了较好的效果.
3)指纹图像的方向滤波:根据像素点方向不同设计一组滤波器,以满足不同方向的像素点,设计时必须考虑指纹方向性和谷脊交替的特性.
4)指纹图像的二值化:将滤波后的图像转化为二值图像,是指纹识别必不可少的一步.
1.2 归一化
f(i,j)代表原始图像在点(i,j)的灰度值,f'(i,j)代表规格化后的图像在点(i,j)的灰度值,M代表原图像的均值,VAR代表原图像的方差,由公式(1)和公式(2)确定.M0和是期望得到的均值,VAR0是期望得到的方差.f'(i,j)为规格化后的指纹图像由式(3)确定.其中:M0和VAR0为预置的均值和方差,可以取M0=120,VAR0=120.其处理后的图像如图2所示,图3为未经处理的指纹原图像.可见,正规化并没有改变指纹文线的质量,只是改变了整幅图像的对比度.


1.3 运用改进的梯度法求解方向图
本文采用的是Sobel梯度算子.把大小为3×3的Isotropic Sobel算子扩展到5×5,如下所示,扩展的二维Isotropic Sobel是垂直边缘检测算子和水平边缘检测算子.其中改进的依据是权值与临近点和中心点的距离成反比的原则.该方法保留细节能力强,同时去噪能力也很强.
使用这两个方向上的灰度差异就可以计算出当前点的梯度及其梯度方向,垂直于梯度方向的就是脊线的方向.如图4所示为改进算子所求出的方向图.
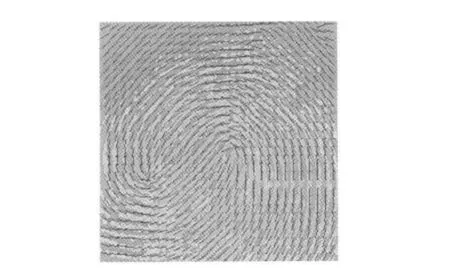
图4 改进Sobel算子求出的方向图
通过方向图短线方向的肉眼直观比较可能难以发现两种方法所求的纹线方向的差异,如图5、6所示.由图5、6比较可知,普通Sobel算子增强后的图像产生了较多的伪特征,通过图7、8的比较以及图9、10的比较可以看出.但改进Sobel算子的增强时间要长于普通Sobel算子,这是较好效果的代价.

2 指纹的方向滤波
2.1 方向滤波器的设计
滤波后的指纹图像中每一个像素的灰度值,都是由原来图像中它的周围点像素值共同决定的.如图11的方向滤波器,每一点的灰度都由其邻近的24个像素的灰度值共同决定,即对于第i行第j列点的灰度值f(i,j)[7]如公式(4)所示,并且通过式(5)对进行进一步的处理:

图11 方向滤波器

由于使用的指纹图像的脊线宽度在个像素之间,因此滤波器的尺寸设置为为宜,并且对上述模板做出一定的修改,使每一行的系数由中间向两端很快地衰减,得到改进后的滤波模板如图12所示.

图12 改进后的方向滤波器
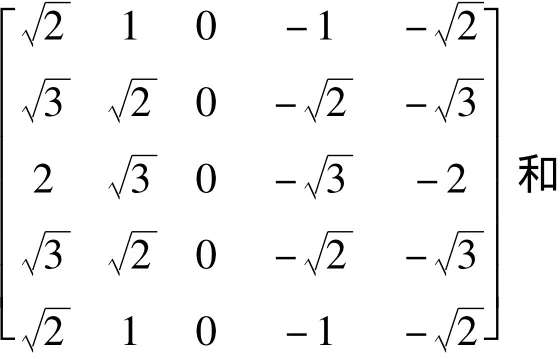
Z=-24,Y=0,X=0,U=30,得到水平方向上的方向滤波器如图13所示.

图13 水平方向滤波器实例
2.2 滤波器的旋转
脊线的方向,可在0~180°之间预先划分为N个基本方向,同时当N越大时脊线方向的描述也就越好,但实验证明:若N太大,耗费计算时间多,对脊线方向质量的改善也一般,此处理中最好选取一个恰当的值.通过实验比较,N取8时就满足实际要求,即需要8个不同的滤波器.
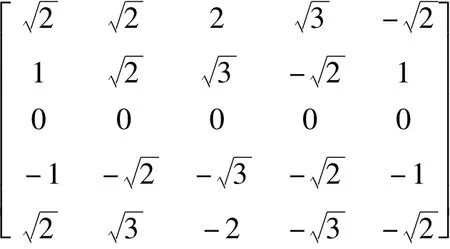
如上已设计出了水平方向上的滤波器,其他方向的滤波器可由水平方向按式(6)旋转[8-10]得到.旋转后的滤波器坐标为(x',y'),水平方向滤波器的坐标为(x,y).其(x',y')点的权值可通过旋转θ角,返回到水平方向上(x,y)点,并通过f(x,y)的值求取.如图14所示.


图14 点方向坐标变换
通过旋转处理后,得到的滤波器,其(x',y')的系数与水平方向的滤波器(x,y)位置的系数是相等的,即fθ(x',y')=f(x,y).根据式(6)计算出对应于(x',y')点的值即(x,y)值.当(x,y)不为整数时,分别取其附近的4个整数点,如图15所示.具体计算步骤如下.

图15 线性插值算法

3 实验结果分析
通过VC++编程,我们可以得到8个方向上的方向滤波器,图16展示了这8个滤波器分别作用的结果.
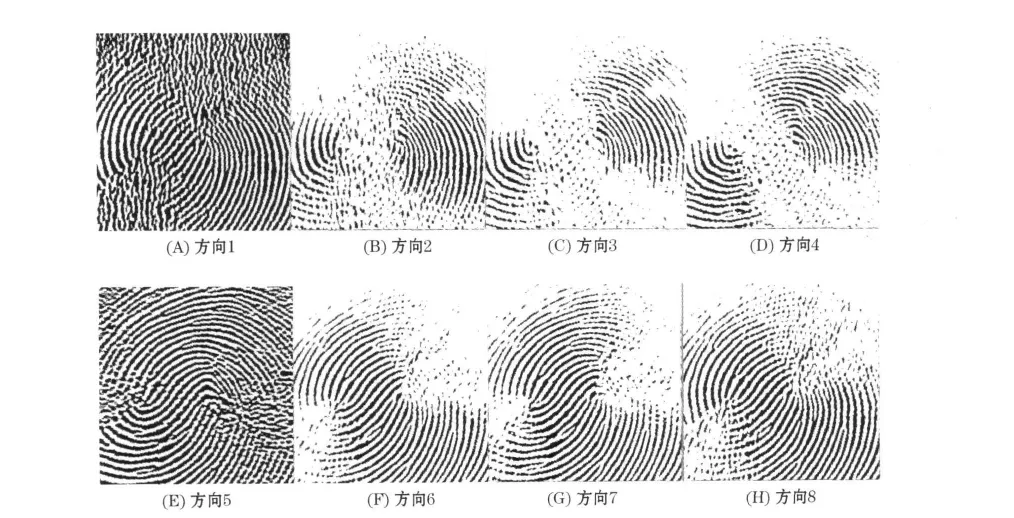
图16 方向滤波器各方向分别作用结果
在编程过程中,对角度分区间进行操作共分为8个区间,每个区间的长度都为,分别为(0°~11.25°)∩(168.75°~180°)和(11.25°~33.75°),(33.75°~56.25°),(56.25°~78.75°),(78.75°~101.25),(101.25° ~123.75°),(123.75° ~146.25°),(146.25°~168.75°)依次对应着方向1滤波器~方向8滤波器,最后的滤波增强结果如图17(B)所示.我们从图像中提取出部分来仔细分析,如图18所示,可见本算法对空洞,断裂的修补能力极佳,还大大的改善了图像的对比度,而且增强后的图像并未改变原图像的大部分的重要的特征.
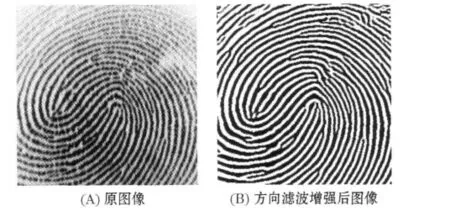
图17 方向滤波增强

图18 细节对比

图5 实验结果对比
[1]CHRISTOPH F.A 3D-TV Approach Using Depth-Image-Based Rendering(DIBR)[C]//Visualization,Imaging,and Image Processing(VIIP),Benalmadena,Spain.2003,482--487.
[2]CHAOCHUNG C,CHENGTE L,POSUN H.A Block-based 2D-to-3D Conversion System with Bilateral Filte[C]//International Conference on Consumer Electronics,Las Vegas,NV,USA.2009:1-4.
[3]FENG X,GUIHUA E,XUDONG X,et al.2D-to-3D Conversion Based on Motion and Color Mergence[C]//3DTV Conference:The True Vision-Capture,Transmission and Display of 3D Video,Istanbul,Turkey,2008:205–208.
[4]SHAOJIE Z,TERENCES.Defocusmap estimation from a single image[J].Pattern Recognition,2011(5):1852–1858.
[5]YUE F,JAYASEELAN J,JIANG J.Cue based disparity estmation for possible2D to3D video conversion[C]//Visual Information Engineering.IET International Conference,Bangalore,India.2006:384-388
[6]ASHUOTSH S,JAMIE S,ANDREW Y N.Depth estimation usingmonocular and stereo cues[C]//International Joint Conference on Artificial Intelligence(IJCAI),Hyderabad,India.2007:2197-2203.
