栅控行波管雷达发射机监控系统*
2012-10-16王刘军刘昌锦
王刘军 刘昌锦
(1.陆军军官学院研究生管理大队一队 合肥 230031)(2.陆军军官学院三系防空兵教研室 合肥 230031)
1 引言
雷达发射机是整个雷达系统的重要组成部分,其性能和品质直接影响决定着雷达整机的性能和品质。而栅控行波管雷达发射机处于高电压、高增益、高频率、大功率的工作环境中,极易出现自激、串扰、击穿、打火等故障,成为雷达整机中可靠性最低的系统[1]。因此,为了提高发射机的可靠性,除了通过改进发射机尤其是其中行波管的制造工艺的方式外,设计出一个能够担负对发射机技术参数和工作状态进行监视、控制、调节和保护的系统也是一种重要的方式。同时,监控系统要能够保证自身工作的绝对准确和可靠。
2 发射机监控系统发展现状
发射机监控系统的作用是实现对雷达发射机的开关控制、工作状态监测和指示、故障的监测、定位和处理、关键参数测试等,并且要能够实现与雷达主控台之间的通信。因此,要使雷达发射机能够长期稳定工作,必须要有一个可靠的发射机监控系统。目前,应用于发射机的常用监控系统分为四类。
1)基于继电器连锁电路的监控系统
发射机监控系统早期主要采用继电器连锁电路作为监控系统的主电路,其优点是结构简单、电路可靠。其缺点是系统体积大、控制方式不灵活、硬件接线较多、远程控制不方便、故障保护响应速度慢等[2]。该类监控系统设计的主要思路是:通过控制发射机各部分的供电来控制发射机各部分的工作状态,以交流接触点为执行元件,以继电器为驱动元件。其故障判定方法是:将发射机各部分引出一对断开触点,将其接通监控系统中的一个继电器,通过继电器触点进行电路连锁和故障指示,当出现故障时触点闭合。
2)基于单片机的监控系统
伴随着微处理的发展,发射机监控系统也逐渐向集成化、智能化方向发展,在发射机的监控系统中开始大量使用单片机。其优点是:适应范围广、响应速度快、能够处理各种模拟和数字信息、有通信接口,能够把采集到的发射机的状态、故障、参数等信息通过标准通信结构传送到雷达主控台等[3]。缺点是抗干扰性差、显示能力差、对较大的系统不能较好地适应等。因此该类监控系统在强电磁干扰环境中,需要在硬件和软件上采用多种抗干扰措施。
3)基于嵌入式工控机的监控系统
基于嵌入式工业控制机(简称工控机)来设计监控系统能够克服基于单片机的监控系统的不足,同时其优点还有:(1)兼容性好,易于升级;(2)软件资源丰富,所有在PC上能运行的软件都可在工控机上运行;(3)人机界面较为友好;(4)通信组网功能强大,工控机提供的各种网络适配器支持各种通信方式,因而可以构成较大的分布式控制系统;(5)模块化结构,维修方便;(6)可靠性高,电磁兼容性好等[4]。
4)基于可编程逻辑控制器的监控系统
虽然可编程逻辑控制器(PLC)也属于单片机系统的范畴,但是PLC经过了规范化的设计和工业控制中的大量使用,以及严格的电磁兼容实验,目前已经发展成为最可靠的控制器之一[5]。事实上,PLC是由继电器控制系统发展而来的,只不过是使用集成电路和内部逻辑代替了分立继电器、定时器、计数器和其他设备,具有较大的容量、精度和更大的灵活性。为了能够在强电磁干扰环境中适用,PLC采用了有效的电位隔离、瞬态控制和滤波等抗干扰技术,使其内部电路能够可靠稳定地运行。同时,PLC还具有开放的通信协议,能够比较容易地实现远程精确控制。
3 栅控行波管发射机监控系统
随着新型控制器件的不断问世,发射机监控技术近年来取得了突飞猛进的发展。栅控行波管发射机监控技术从最初的继电器控制电路发展到现在广泛采用的工控机及PLC系统。工控机由于抗干扰性能好,功能强大,可以用于发射机控制台;PLC由于采用了模块化设计,各种接口形式的模块比较齐全,可以根据需要对模块的种类和数量进行选择。栅控行波管雷达发射机监控系统框图如图1所示。
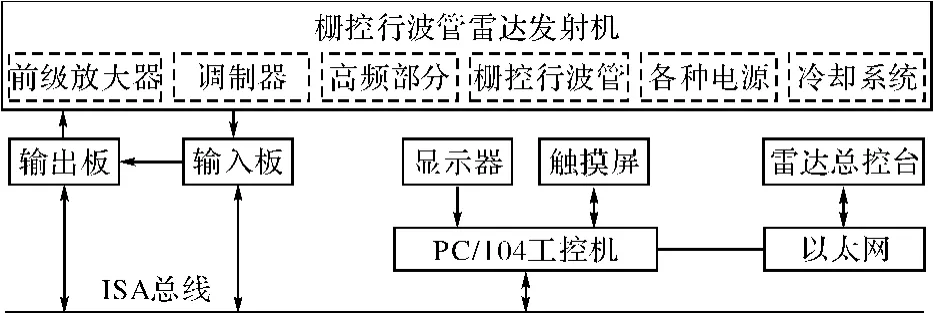
图1 栅控行波管雷达发射机监控系统
栅控行波管雷达发射机主要由前级放大器、调制器、高频部分、栅控行波管、各种电源和冷却系统等组成[6]。监控系统的控制核心是PC/104,采用模块化结构,PC/104主板由PC/104工控机和复杂可编程逻辑器件(CPLD)组成,由其引出通信接口,并将背板引接到ISA(Industry Standard Architecture)总线上。输入板由CPLD、A/D变换和光电耦合器件组成,完成对发射机状态和故障信号的采集工作,并将信号通过接口电路传送至ISA总线,由PC/104工控机读取和处理。输入板由CPLD、光电耦合器件和驱动器件组成,将来自ISA总线的控制信号经隔离驱动传送到发射机的各个部分。
同时,为了处理一些需要很快响应速度的故障保护信息,在输入板上还有快速保护通道,一旦出现该类故障,输入板直接通过快速保护通道将信号直接送到输出板。显示器用于显示发射机的各项参数以及故障原因等,它与触摸屏共同构成了监控系统的人-机交互界面。另外,监控系统不仅要能够实现对本地控制、信号采集、故障处理和状态显示,还必须能够接收雷达总控台的控制指令、同步信号、故障处理以及状态控制等,并通过以太网向雷达总控台发送本地故障和状态信息[7]。
雷达发射机加电后,监控系统首先对自身的内部器件进行初始化检测,要确保自身能够正常工作后,才能对雷达发射机进行监控。根据系统框图可以看出,检测系统的工作方式包括本地监控和遥控监控两种。事实上,遥控监控只是在本地监控的基础上,能够接收雷达控制台的控制指令,同时发送发射机的各种参数。
在本地监控状态下,栅控行波管雷达发射机开机程序是:1)开冷却系统电源及钛泵电源;2)开低压电源及栅极正、负偏压电源和灯丝电源;3)当预热时间已到和无故障信号时,可送出高压准加信号;4)高压准加信号到了以后,即可接通高压电源。当高压逐渐加到额定电压后可加栅极触发脉冲;5)行波管工作正常后,接通高频激励信号。在关机时由于灯丝温度下降较慢,因此在断开灯丝电压后,负偏电压仍要保持几分钟,以免对栅极造成破坏。发射机的关机程序与开机程序相反:1)切断射频激励信号;2)切断直流高压及栅控驱动脉冲信号;3)关低压、灯丝电源;4)延迟几分钟后,自动关冷却系统电源,以保证行波管及发射机的充分冷却[8]。
在雷达发射机正常工作的情况下,监控系统综合发射机各个传感器采集的数据信息,进行实时的检测、判断和显示。当发射机产生故障的情况下,监控系统首先应当切断发射机的触发脉冲和高压,然后将故障信息传送出来并进行显示,同时保留相关故障数据,以便事后对故障进行分析和处理[9]。
4 栅控行波管关键参数检测
在雷达发射机工作中,需要实时对关键参数进行采集和监控,以便人员能够及时了解发射机的工作状态。一旦故障发生,能够通过发射机监控系统进行自动或人工的保护。在对各项参数进行采集的过程中,需要进行多路信号同时采集,然后再通过一定的算法,可以判定行波管的工作状态。
同时,要保证参数检测的结果是可靠的,应当从以下两个方面入手。第一,检测的方法要正确,选择满足精度要求的经过计量部门鉴定的合适检测仪表;第二,由于发射机内部的强电磁干扰环境,多路信号的参考电位会产生差异,导致参数检测不准确,因此在参数信号采集的过程中,需要采用电流互感和光电耦合等技术进行电磁干扰防护。
栅控行波管是雷达发射机的核心部件,因此对其主要技术参数进行检测是整个监控系统最首要的任务和关键所在。由于雷达发射机在出厂时已经经过了密封处理,因此在线监测系统是不能通过直接的方式对关键参数进行采集的。同时,由于监测系统的目的是监视和控制发射机的工作状态,发现判定故障和故障保护,不同于行波管的设计和出厂检测,所以也没必要对其进行直接参数采集。因此可以采用电源监控的方法对关键参数进行间接采集和控制,其结构框图如图2所示。
其中的采集系统主要由各级电压/电流采集、电压频率转换(VFC)、隔离传输光纤、频率电压转换(FVC)和多路ADC等部分组成,其主要结构框图如图3所示。
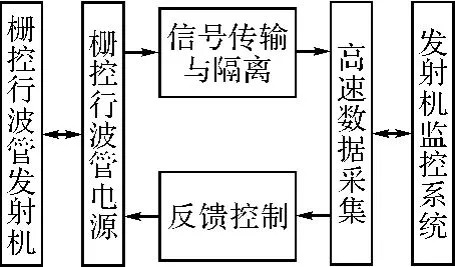
图2 行波管电源监控方式
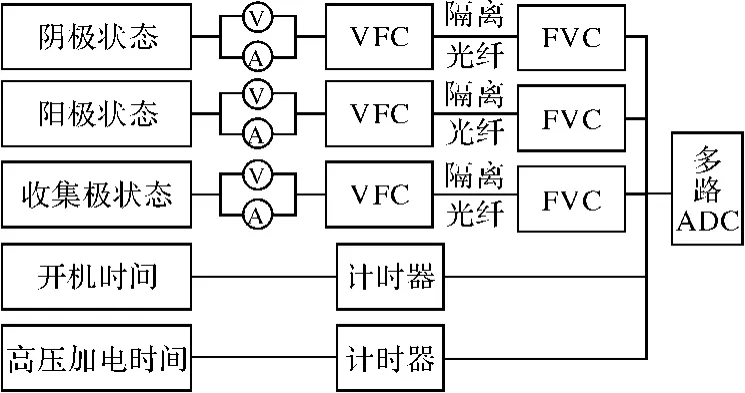
图3 采集系统
5 结语
栅控行波管雷达发射机监控系统正在向着高度智能化、自动化、人-机界面友好的方向发展。与固态雷达发射机相比,真空管雷达发射机需要保护和监测点较多,系统结构复杂,且工作环境电磁干扰严重,一个可靠稳定有效的监控系统是雷达发射机性能水平的一个重要标志。随着监控新技术的不断发展,必将使雷达发射机具有更好的稳定性和可靠性。
[1]郭高峰.栅控行波管雷达发射机的控制与保护[J].现代电子技术,2009(22):200-202.
[2]周秀君.用PLC技术改造继电器电路的探讨[J].电气传动自动化,2007(6):51-53.
[3]郝东亮.单片机监控广播发射机的系统设计[J].广播与电视技术,2009(12):116-118.
[4]马延,王健.嵌入式工控机PC/104在CAN现场总线通信中的应用[J].微计算机信息,2001(11):30-31.
[5]叶锋.PLC监控器的研制与开发[J].科技资讯,2010,19:5.
[6]葛圆圆,谢英.雷达发射机监控技术的特点与发展应用[J].信息化研究,2009(9):42-44.
[7]胡惠玉.基于工业以太网上位机对远程PLC的监控[J].长春工程学院学报,2011(2):113-116.
[8]郑新,李文辉,潘厚忠,等.雷达发射机技术[M].北京:电子工业出版社,2006:410-411.
[9]谭源源,陶利民,周远华.C/S模式数据库在发射机监控管理系统中的应用[J].兵工自动化,2006(1):42-44.
[10]李旭东,陈冬,程鹏.二次散射对脉冲激光雷达回波功率的影响[J].计算机与数字工程,2012(1).
[11]杨文君,林伟.基于DSP5402的雷达测速系统硬件、软件设计[J].计算机与数字工程,2012(5).
[12]胡晓军.数据采集与分析技术[M].西安:西安电子科技大学出版社,2010:46-47.