基于STC12C5A03的倒车雷达系统设计
2012-10-14郑建立
李 东,郑建立
东华大学信息科学与技术学院,上海 201620
0 引言
2011年底我国汽车保有量破一亿大关位于世界第二,然而,随着保有量的激增由此而带来了道路拥挤和交通事故频发等问题。在所有交通事故中,由泊车而引发的交通事故占有很大比例。因此,倒车雷达系统应运而生。本文介绍的倒车雷达系统采用渡越时间法进行超声波测距,并运用自动增益放大电路提高系统的测量精度。
1 超声波测距原理
渡越时间法(TOF)的工作原理:检测从超声波发射探头发射出去的超声波, 经气体介质传播到接收探头的时间, 这一段时间称为渡越时间。渡越时间与超声波在气体介质中的声速相乘, 就是声波传输的距离。公式如下所示:

式中,s为待测距离,v超声波在气体介质中传播的声速,t为渡越时间。
超声波在空气中传播时很容易收到环境温度的影响,超声波速度与空气温度的关系为:

其中,v0为超声波在0℃的空气中的传播速度331.45m/s,T为空气的温度。
2 系统硬件设计
该系统以STC12C5A60S2为核心控制芯片,系统主要包括超声波测距模块,温度补偿模块,时钟模块,显示模块和语音报警模块等。系统的总体框图如图1所示。

图1 系统的总体框图
2.1 超声波测距模块
本文设计的超声波测距模块采用了自增益放大电路、渡越时间法检测电路和峰值检测电路。可变增益放大电路主要用来调整回波信号的幅值;渡越时间法检测电路主要用来判断接收的信号是否为回波,若是回波,则请求单片机中断,立刻停止时钟模块的计时工作,将所计时时间传递给单片机;峰值检测电路主要用于消除干扰信号,检测出回波信号的峰值传递给单片机。
超声波测距模块主要包括超声波传感器,超声波发射接收电路、前置放大电路、可变增益放大电路、带通滤波电路、峰值检测电路、渡越时间法检测电路。
2.1.1 超声波发射接收电路
本系统超声波传感器选用收发一体式超声波传感器TCF40-25TR1,其中心频率为40kHz。超声波发射接收电路接收通过P1.0 输出的,由STC12C5A60S2单片机产生40kHz的TTL脉冲信号,驱动超声波传感器发射超声波,超声波在空气中传播,遇到障碍物反射的回波信号加载到超声波传感器上。

图2 超声波发射接收电路
2.1.2 可变增益放大电路
由于超声波在空气中传播时,超声波的声强随着传播距离的增加而呈减少,其减小系数与超声波频率的平方成正比。因此系统设计可变增益放大电路,主要是使得放大器的增益随距离的变化而自动调整,使得回波信号的幅值不随距离的变化而受到较大影响。可变增益放大电路AGC如下图所示。

图3 可变增益放大电路AGC
这里采用一对场效应管J1和J2可组成动态范围较大的增益,由外加电压AGC控制的压控放大器。而控制电压AGC应能随目标的远近自动调整,即当测量距离变小时,接收回波信号较大,这时,AGC应自动调小,反之,AGC应自动调大。图4为电路设计可得到满足这一要求的控制电压。

图4 控制电压产生电路
2.1.3 峰值检测电路
本文系统设计回波峰值检测技术,主要是消除虚假回波和噪声的干扰。因为干扰信号有可能达到正常回波的域值,但其幅值达不到正常回波的峰值,因此采用回波峰值检测电路可有效剔除干扰信号,提高超声波测距模块的检测精度和可靠性。为了避免二极管死区电压对超声波测距模块检测精度的影响,系统利用深度负反馈和运算放大器开环增益大来有效限制。
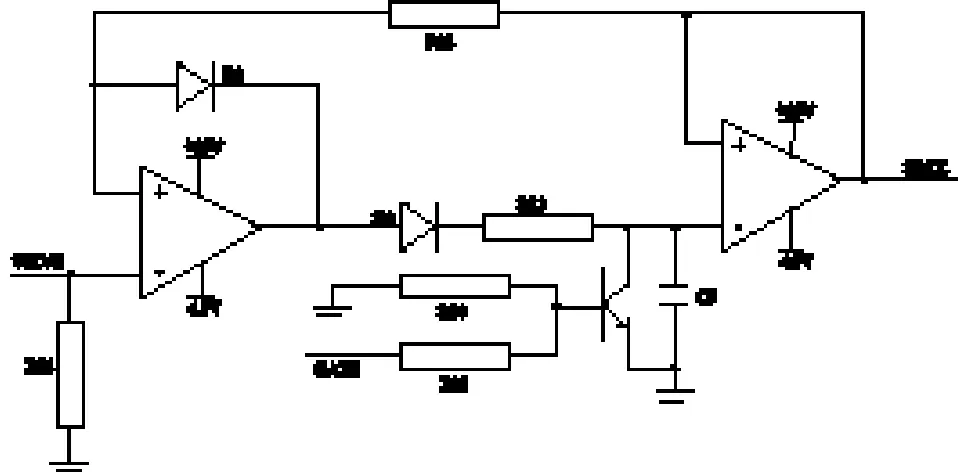
图5 峰值检测电路
2.1.4 渡越时间法检测电路
系统中的渡越时间法检测电路采用可变域值检测、回波峰值检测、过零检测等技术。这样就可以检测到准确的检测到回波信号,并发送命令使得时钟模块停止计时,保证了渡越时间的准确和可靠性。
2.2 温度补偿模块
由于空气的温度对超声波的波速有一定影响,因此系统设计温度补偿模块对环境温度进行测量,通过公式2得出当前温度下的超声波波速。系统温度补偿模块选用美国 DALLAS 半导体公司的DS18B20温度传感器作为核心芯片,其集温度测量、A/D 转换于一体,具有体积小、动态范围宽、测量精度高等优点。该芯片具有独特的单线接口,仅需要一个端口引脚进行通信;可以通过数据线供电,电压范围为3.0V~5.5V;测温范围为-55℃~125℃,分辨率最大可达 0.0625℃,基本可以满足实际测量的需要。
3 系统软件设计
本文系统设计了三路超声波测距模块, STC12C5A60S2单片机的三个中断口分别来处理回波信号。单片机将三路超声波测距模块测得的距离值进行比较后取最小值,并判断该最小值来自哪路超声波测距模块,将距离、环境温度、障碍物位置在显示模块上显示出来,同时根据距离值进行语音报警。

图6 系统主程序流程图
4 测量结果与分析
本系统测量的范围为30cm~350cm,在30cm~200cm范围内,所设置的标准值以10cm为步长递增至200cm。在200cm~350cm范围内,所设置的标准值以20cm为步长递增至350cm。
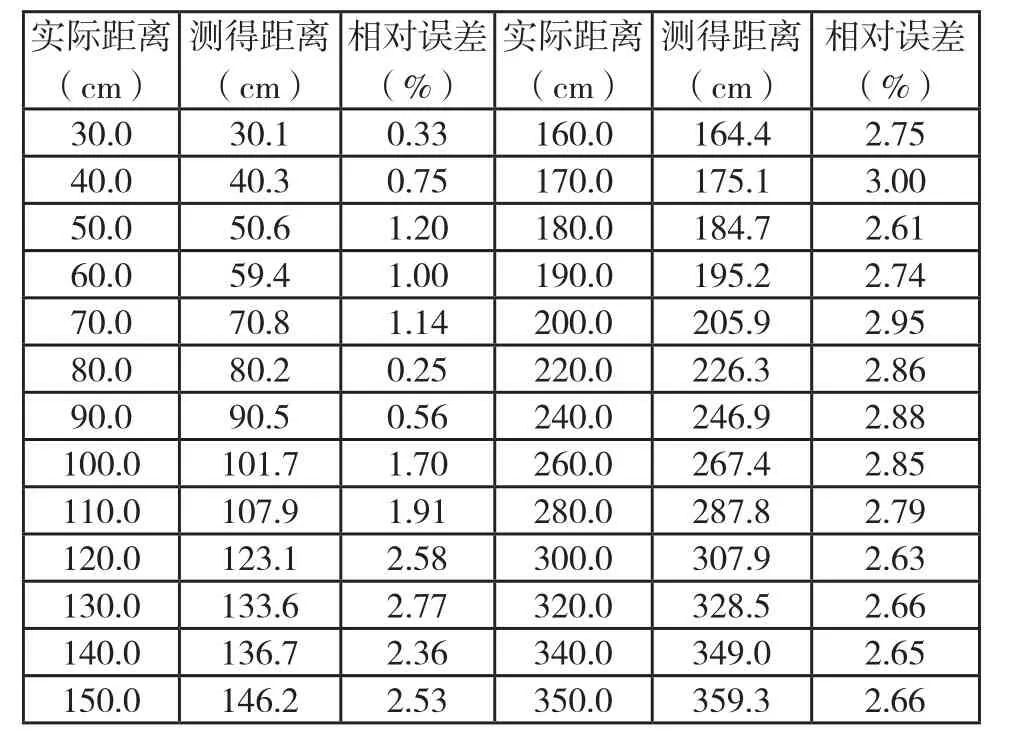
表1 测量数据
5 结论
实验结果表明该倒车雷达对障碍物距离的测量结果稳定,探测范围能够达到 在整个测量范围内30cm~350cm,最大误差小于3%。本系统设备成本低、精度高、实时性好、可靠性高,提高了汽车倒车时的安全性。
[1]赵海鸣,王纪婵,刘军,史春雪.一种高精度超声波测距系统的改进[J].电子技术应用,2007(4):59-61.
[2]曾祥进,王敏,黄心汉.自动增益电路在超声波测距系统中的应用研究[J].测控技术,2005(7):69-71.
[3]中国机械工程学会无损检测分会.超声波检测[M].北京:机械工业出版社,2000.