基于dSPACE的运动控制系统实验平台设计
2012-10-12邵雪卷张井岗赵志诚
邵雪卷,张井岗,赵志诚
(太原科技大学电子信息工程学院,山西太原030024)
0 引言
“运动控制系统”课程综合了电子电路、电机拖动、自动控制理论、微机原理与应用等多学科知识,是一门综合性、实践性和应用性很强的课程。双闭环直流调速系统是“运动控制系统”课程的重要内容,该部分内容理论性强且比较抽象。为了让学生能直观地了解不同调节器以及同一种调节器不同参数对系统性能的影响,在现在的教学中经常用到的有两种方法[1]:一是在实验室中,先测出电机的基本参数,采用工程方法设计出两个调节器,然后在直流调速实验台上进行操作,以观察电机起动时的电流和转速波形。这种方法使用的是模拟调节器,模拟调节器存在零点漂移现象,且环境温度变化会影响调节器参数,但对于一些先进的控制方法用模拟调节器难以实现;二是在Matlab/Simulink下搭建结构框图,然后进行仿真研究。这种方法虽然调节器参数比较容易调节且不受外界影响,但仿真使用的是电机数学模型,仿真结果过于理想化。
dSPACE是基于Matlab/Simulink开发的实时仿真系统软硬件工作平台[2],它可以提供快速控制原型系统的应用平台,在这个平台上不仅控制器容易实现,而且可以实时地调整控制器参数,并提供多种参数显示方式,满足不同的需求。本文针对双闭环直流调速系统,使用快速控制原型方式设计了一套以dSPACE为核心的运动控制系统实验平台,并在此平台上,研究了PID控制和内模控制策略在运动控制系统中的应用。在线仿真研究表明,基于dSPACE平台的双闭环直流调速系统实现简单,参数修改方便,易于学生了解不同控制器对系统性能的影响。
1 基于dSPACE的控制系统开发
在使用dSPACE之前,学生首先需要了解直流调速系统的软件构成以及各软件的作用。dSPACE的软件包括Matlab/Simulink/RTW,dSPACE/RTI和ControlDesk等。
RTW可以从Simulink方框图自动生成C代码,RTW与dSPACERTI联合可以实现从模块方框图到dSPACE实时硬件的转换。
RTI是连接dSPACE实时系统于现代控制设计开发平台Matlab/Simulink之间的纽带。RTI对Simulink库进行了扩展,利用这些框图可以无需书写任何代码就能完成包括I/O接口及其初始化过程的全部设置。
我们可以采用Simulink建立模型并加入需要的dSPACE I/O模块,然后对RTW进行设置,就可以实现从Simulink模型到dSPACE实时硬件代码的无缝自动下载。ControlDesk是dSPACE公司开发的新一代实验工具软件。一旦控制器的开发及仿真模型用Matlab/Simulink建立好,通过RTI实现并下载到实时硬件中,就可以使用ControlDesk对运行过程进行监控。
基于dSPACE的控制系统可以采用如下的开发过程。
(1)算法框图的建立—在Matlab/Simulink中建立控制算法的框图,控制算法可以直接用传递函数表示,也可以用C语言编写;
(2)加入输入/输出口(I/O)—从RTI库中拖放实时测试所需的I/O,并对I/O参数进行配置;
(3)选择RTW Build—Matlab与dSPACE可实现完全无缝连接,以此完成目标系统的实时C代码的生成、编译、连接和下载,将Simulink下的模型变为dSPACE可运行的程序;
(4)进行dSPACE综合实验和调试—利用dSPACE提供的ControlDesk对实时仿真数据进行获取、联机改变参数并进行实时实验。
2 双闭环直流调速系统实时控制平台
基于dSPACE的双闭环直流调速系统总体构成如图1所示。

图1 双闭环直流调速系统实时控制平台
从图1可见,基于dSPACE的调速系统包括工控机、dSPACE硬件、整流装置、直流电机以及电流、转速检测装置。工控机是底层工具,dSPACE实时系统软件Matlab/Simulink/RTW和ControlDesk/RTI安装在其中。dSPACE硬件安装在它的ISA插槽上。dSPACE针对不同用户的需求,提供多种可供选择的硬件系统,如单板系统和标准组件系统等。
本文采用的硬件是DS1103单板系统,把DS1103提供的A/D和D/A模块与调速系统根据控制要求连接。基于dSPACE的调速系统实质上是一种数字控制,需要对输入信号和输出信号进行A/D转换和D/A转换。调速系统有给定电压,转速反馈电压和电流反馈电压三个模拟输入信号,都需要通过A/D转换才能被dSPACE系统处理;控制器输出控制电压,这是一个数字信号,需要通过D/A转换成模拟信号才能控制晶闸管整流电路的触发角进而控制电枢电压。
本文采用dSPACE的单板系统DS1103可以提供20路A/D通道和8路D/A通道,把选用的A/D和D/A通道所对应的引脚通过信号线和其对应的输入输出连起来,即可完成系统的硬件连接。在Simulink下搭建控制系统模块框图,使用RTW的Build把控制框图自动编译并下载到dSPACE硬件后,就可以脱离工控机在dSPACE硬件上独立运行。
3 dSPACE在调速系统中的应用
3.1 实验用的直流他励电动机DJ15
DJ15的主要技术参数为额定电流IN=1.2A,额定转速nN=1600r/min,额定电压UN=220V,额定容量185W,额定励磁电流IfN<0.13A,励磁电压220V。通过实验测量计算可得电枢回路总电阻R=30.06Ω,电枢回路总电感L=532mH;飞轮惯量CD2=0.154N·m2;晶闸管整流装置放大倍数KS=15;电动机电势系数Ce=0.121V·m2,系统的机电时间常数Tm=0.25s,转矩常数Cm=1.156V·r/min,本文采用工程设计方法来设计PI电流调节器和PI转速调节器。
3.2 PID控制的调速系统
基于dSPACE的调速系统的Simulink模块框图如图2所示。利用dSPACE扩展了的RTW的Build功能,可以把Simulink模块框图编译并下载到dSPACE硬件上。

图2 PID控制的调速系统的dSPAC实现模块
为了对运动控制系统的性能进行评估,我们可以利用ControlDesk建立用户虚拟仪表对控制参数进行实时检测;控制器参数的设定对控制器性能的影响至关重要,ControlDesk可以通过使用不同仪表在线修改调节器参数。还可以利用ControlDesk提供的绘制功能,得到双闭环直流调速系统的电流响应曲线和转速响应曲线,如图3所示。从图3(b)的速度响应曲线可以看出,采用PI调节器存在转速超调现象。

图3 PID控制的调速系统特性
3.3 内模控制的调速系统
内模控制器具有常规PI调节器控制稳态精度高和抗干扰性能好的优点,根据内模控制原理,结合工程设计法,设计一种内模速度控制器,可以实现无转速超调控制。采用内模控制策略的双闭环直流调速系统的Simulink控制框图如图4所示。
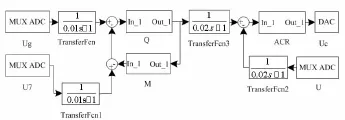
图4 内模控制的调速系统的控制框图
内模控制的调速系统的电流、转速的响应曲线分别如图5所示。从图5(b)可以看出,采用内模控制的调速系统可以避免转速超调现象。
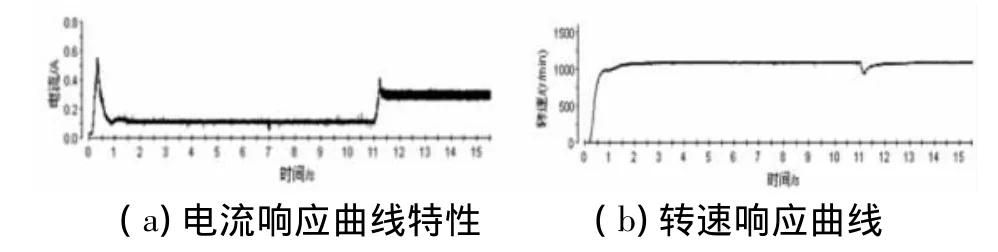
图5 内模控制的调速系统
从以上两个实验可以看出,采用dSPACE实时仿真系统只需改变结构框图中的控制器部分,就可以实现不同控制策略在运动控制系统中的应用,而且通过ControlDesk界面很容易修改控制器参数。这对于学生在学习运动控制系统过程中,了解不同控制策略以及相同控制策略不同控制器参数对系统的影响是非常有益的。
4 结语
本文基于dSPACE设计了双闭环直流调速系统的实时控制平台,并在此平台上,研究了常规PID和内模控制两种不同的控制策略在运动控制系统中的应用。
实验结果表明,基于dSPACE平台的双闭环直流调速系统实现简单,参数修改方便,学生可以很直观地看到不同控制器下的控制效果。这一实验平台的设计使得各种先进控制算法应用于运动控制系统成为可能,适合于教学实验使用。
[1] 杨静,黄江平,杨辉,陈世明,龚锦红.“运动控制系统”课程虚拟实验室建设的探索[J] .南京:电气电子教学学报,2009,31.
[2] 杨涤,李立涛.系统实时仿真开发环境与应用[M] .北京:清华大学出版社,2002.
