电机转速传感器高精度检测装置的研究
2012-10-12吴房胜余华益陈业丽
吴房胜,余华益,张 翔,陈业丽
WU Fang-sheng1, YU Hua-yi2, ZHANG Xiang3, CHEN Ye-li4
(1. 安徽新华学院 电子通信工程学院,合肥 230088;2. 安徽安凯福田曙光车桥有限公司,合肥 230051;3. 合肥美亚光电,合肥 230088;4. 安徽霍山县与儿街中学,六安 237200)
0 引言
电动机占我国电力损耗非常大,其能效检测设备必不可少,而这种检测设备主要是对转速特性的检测,即转速传感器。为确保准确度,转速传感器自身的技术指标是否达到精度要求还无法检测。本文设计了一套设备,将嵌入式与数字图像处理技术相结合,实现高精度自动对中,保证连接同心度,其精度远远高于传感器的精度,因此可用来检测转速传感器是否达标。
1 系统概述
本装置如图1所示,左侧为驱动部分,工业相机安装在驱动主轴上,电机带动驱动主轴旋转;中间为自动对中部分,相机拍摄图片,进行自动对中并自动联接;右侧为被测件安装板,用来安放被测传感器,伺服电机带动被测件安装板,完成对中附件的精确移动。自动对中完成后,再将左侧驱动部分与右侧被测部分自动精确联接,避免人为操作误差。
对中附件如图2所示,工业相机对附件中间小黑块连续拍摄,进行图像采样,将数据反馈给控制芯片,控制芯片确定对中位置与中心距的偏移,再控制对中附件上下,左右,旋转等移动,实现高精度自动对中。该附件为白色背景,中央为黑色矩形,控制芯片采用S3C2440,拍摄到图像后,嵌入式采集卡采集相机拍摄的信息,将其传给ARM进行数据处理,最后利用伺服电机控制安装板移动的方向和位移。同时,ARM端口采集光电传感器的信号,反馈给控制中心,然后不间断比较实际转速与设定转速的差值,不停的向伺服电机发出指令,调节转速,形成一个闭环控制,直到实际转速达到设定转速。最后比较驱动转速与被测传感器上显示的转速的差值,如差值大与规定值,为不合格产品。
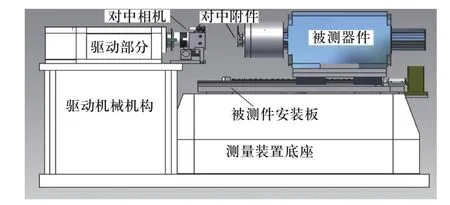
图1 装置结构图

图2 对中附件
2 基本理论
2.1 转速的测量
驱动转速测量时,光电编码圈安装在驱动主轴上,驱动主轴带动光电编码圈一起旋转,光电编码圈上的凸齿切割光电转速传感器的红外线。每通过一个凸齿,传感器记录一个脉冲。脉冲信号送到控制芯片,ARM芯片结合时间参数和收到的信号数量计算当前的实际转速。根据指标要求,最高转速6000r/min和不确定度0.03%,将光电编码圈分成30等份,根据f = n×N (f为信号频率;n为转速,单位为r/second;N为光电编码圈分度值),可得信号频率最高3KHz,故选择SICK公司的WF5T-B4210。
2.2 数字图像处理
在拍摄系统中,利用工业相机将静止或运动的对中附件图像拍摄下来。在图像采集、传输时,不可避免地受到外界甚至人为因素的影响,使得所拍的对中图像效果不理想。为消除这些噪声干扰,本装置采用领域平均法对图像滤波。数学公表达为:式中,f (m, n)为给定的噪声图像,g (x, y)为领域平均处理后的图像。滤波后,再对图像边缘检测,突出边缘信息,以利于机器识别。本系统采用Sobel算子对附件图像进行边缘检测。该算子是以图像中某一个像素为中心, 截取一个3×3像素的窗口,然后分别计算窗口像素在水平和垂直方向上的偏导。
本装置采用ARM,其处理能力不如电脑,对图像分割时,提出了一种简单的基于图像边缘的分割法。算法如下:由于图片背景只有黑白两种颜色,对比度相当明显,所以首先利用边缘检测技术,对图像进行二值化处理,通过迭代运算得到图像的平均灰度值,再将平均灰度值作为阀值,大于阀值的像素点为图像边缘,灰度值设定为255,小于或等于阀值的像素点灰度值设定为0,这样就可将边缘图像分离出来。
图像数字处理后,即开始自动对中,在图2中,如果黑色方块不在相机拍摄范围的中心位置,并与拍摄范围的边界有一角度。为将黑色方块精确移到拍摄中心区域,先驱动控制转角的电机进行角度校正。等到图像两边界线与拍摄区域两边界线分别平行时,计算黑色校正方块四条边界离拍摄区域相对应的四条边界的垂直距离,采样的距离长度以及移动的位移可以按一个像素(0.005mm)为单位进行计算,再利用水平方向电机与垂直方向电机进行左右和上下位置的调整,使黑色矩形方块和拍摄区域的左右边距相等,上下边距也相等,最终完成高精度自动对中。
3 软硬件设计
该系统的硬件采用ARM芯片S3C2440,主要实现电机转速检测、自动对中和界面显示与操作等功能。系统硬件框图如图3所示。软件设计采用模块化、子程序化,便于程序的调试、移植和修改,主流程如图4所示。
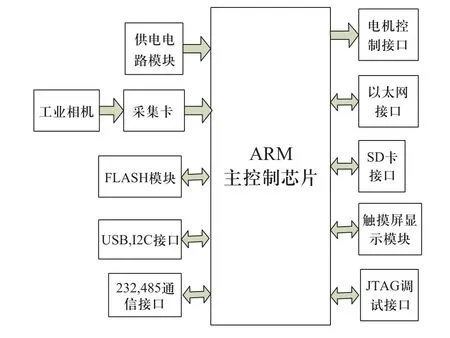
图3 硬件框图
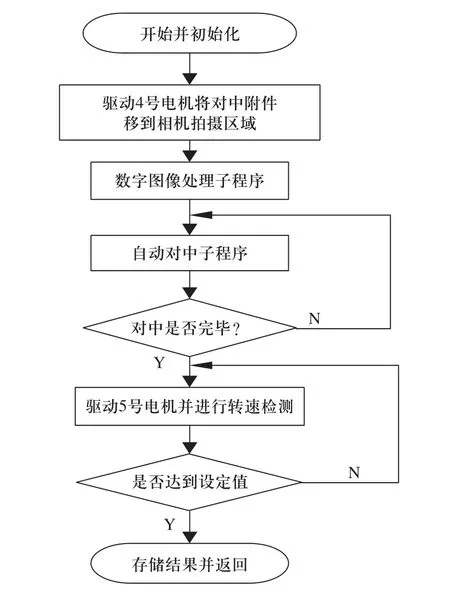
图4 主流程图
4 测量结果
系统运行时,首先采集附件上的原始图片,如图5所示。从图中可看出,图像不在视频范围的正中央,左边界距离小于右边界距离,上边界距离小于下边界距离,角度上也有一定程度的偏差。采集到对中附件图片后,对图片进行数字图像处理,最终实现自动对中,对中后的图片如图6所示。对中后,图像左右边、上下边距均相等,角度偏差为零,完成了附件图片的中心线与驱动部分的中心线相重合,达到精确自动对中功能。其测试界面如图7所示。

图5 原始图片
整体速度测定方面,技术指标要求测量装置的转速特性的准确度等级应等于或高于±0.03%FS。测试结果如下:电机测量范围:(3006000)r/min;转速不确定度:0.019%;自动对中能力:0.08mm,测量范围宽,自动对中精度高,满足检测需求,符合国家检定标准。
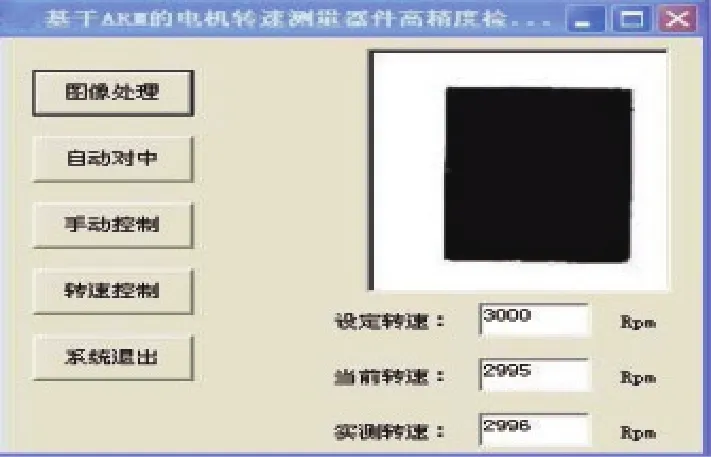
图7 测试界面
[1]印保靖, 等. 转矩转速测量装置转速特性检测方法的研究[J]. 上海计量测试, 2006, (6): 14-16.
[2]连锦湮. 机器计算机视觉的应用—打孔机影像定位系统设计[J]. 今日电子, 2006: 83.
[3]冈萨雷斯. 数字图像处理(MATLAB版)[M]. 北京: 电子工业出版社, 2006: 17-18.
[4]胥静. 嵌入式系统设计与开发实例详解[M]. 北京: 北京航空航天大学出版社, 2005.
