汽车电子机械制动系统的ABS控制策略与仿真分析
2012-10-12何玉娴李伯全田洪胜
何玉娴,李伯全, 田洪胜
HE Yu-xian,LI Bo-quan, TIAN Hong-sheng
(江苏大学 机械工程学院,镇江 212013)
0 引言
随着车辆技术的进步和汽车行驶速度的提高,车辆的安全性能越来越被广泛的关注。电子机械制动(Electromechanical Brake, EMB)是一种全新的制动理念,EMB系统以电池为能源,电机为动力装置,其简捷的结构,高效的性能极大的提高了汽车的制动安全性。汽车防抱死制动系统(Anti-lock Braking System, ABS)作为一种新型的主动安全装置,能够在汽车紧急制动时防止车轮抱死,提高车辆的制动稳定性、缩短制动距离,减少交通事故发生率[1]。
汽车EMB防抱死制动系统的研究核心是其控制器设计中的控制策略的确定,本文通过建立车辆EMB防抱死系统的相关模型,在分析优化的基础上确定ABS控制器的控制策略,利用Matlab/simulink对EMB防抱死系统的控制策略进行仿真,以验证控制效果。
1 防抱死制动原理
汽车制动过程中,车速和轮速之间存在着速度差,也就是车轮与地面间有滑移现象,滑移的程度用滑移率表示[2]:
其中S是车轮滑移率,ω是车辆的车轮角速度,v 是即时车速,r表示车轮半径。车辆车轮纯滚动时滑移率为0,而当车轮抱死时滑移率为100%。根据试验数据,车辆滑移率与附着系数的关系如图1所示。

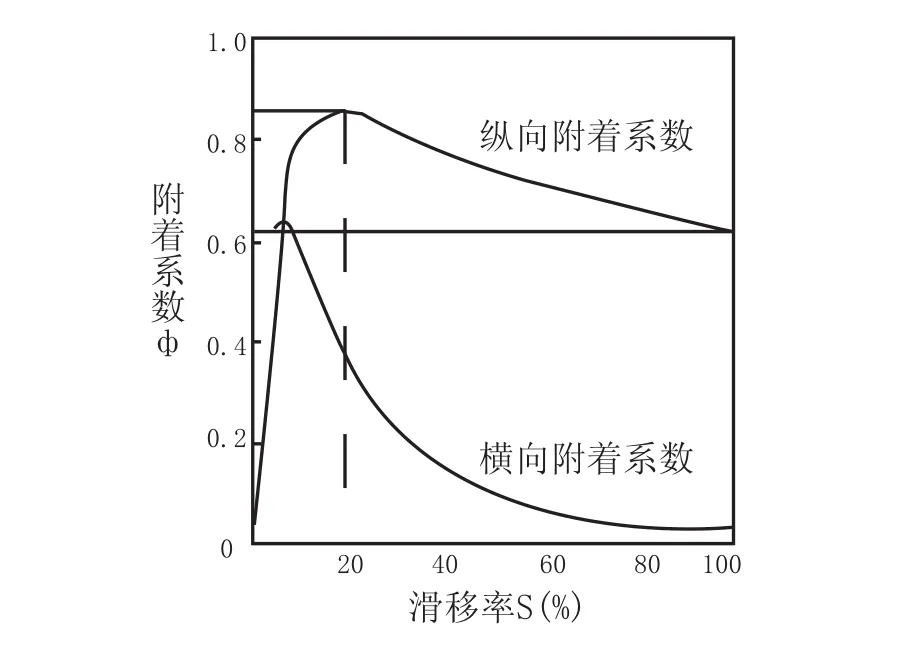
图1 滑移率和附着系数关系曲线
由图1可知,当滑移率s在15%至20%时,附着系数将达到最大值(峰值附着系数),而车轮完全抱死,s =100%时,附着系数有所下降,侧向附着系数甚至达到0。因此,在制动过程中,如果轮胎抱死,不仅车轮的纵向附着系数没有达到最大值,制动距离不能达到最短,而且,因为侧向附着力变为0,车辆会失去方向稳定性和转向能力。
若应用ABS防抱死系统,当驾驶员操纵制动系统引起车轮趋于抱死时,ABS便开始作用,调节车轮制动力,防止车轮抱死,使车轮与地面间的滑移率保持在20%左右,充分利用轮胎与地面间的峰值附着系数和高的侧向附着系数,提高制动减速度、缩短制动距离以及保证汽车的制动方向稳定性。
2 相关动力学模型的建立
2.1 车辆单轮模型
建立车辆单轮模型,此类模型主要描述制动性能,适合于车辆制动性能的分析,同时也可以简化问题,如图2所示为单轮制动受力模型,由图2可得平面运动的微分方程[3]。
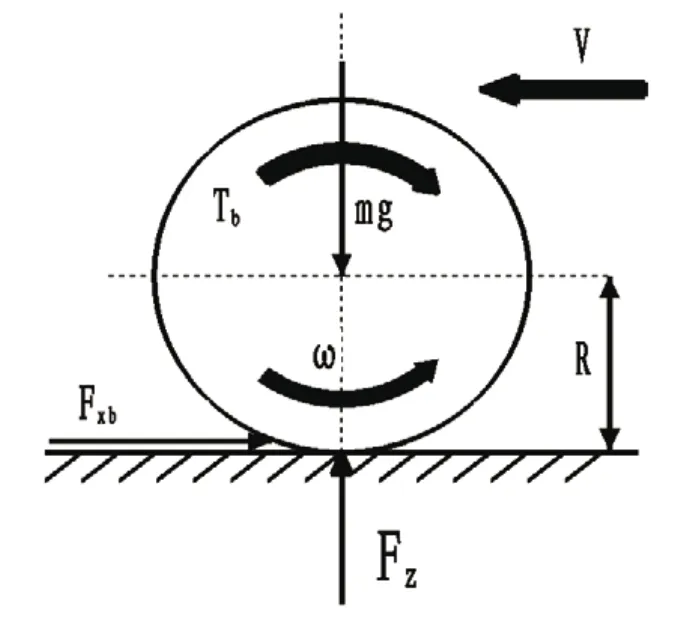
图2 车辆单轮受力模型

2.2 EMB制动器模型
EMB制动器可以分为力矩电机、减速传动机构和制动器模型,力矩电机选用无刷直流力矩电机,减速传动机构选择行星齿轮和滚珠丝杠机构。假设在制动过程中,无刷直流力矩电机工作在堵转状态下,即转速为零,这样电枢电压完全加在电机内阻上面。力矩电机、减速传动机构和制动器数学模型如式(3)所示[4]。

式中,TH为电机堵转转矩;Ke为反电势系数;Ik为连续堵转电流;TX为行星减速机构输出转矩;i 为行星减速机构传动比;ηX为行星减速机构的机械效率;N 为丝杠输出推力;ηS为滚珠丝杠副的效率;ph为丝杠导程;kp为制动器制动因数;Nm为克服弹簧力所需的推力,Tb为制动器制动力矩。
将(3)式中前几项依次带入到最后一项并求导,得

3 汽车EMBS的ABS控制策略与算法
3.1 汽车EMBS的ABS控制策略
EMBS由EMB控制器、电机、减速及运动转换装置等组成。EMB控制器用来控制电机输出力矩的大小;电机用来把电能转变为机械能,减速装置具有减速增扭的功能,运动转换装置用来把电机旋转运动转换为直线运动,从而压紧制动盘产生制动力。汽车采用EMB后,EMB控制器的输入是ABS或电子制动踏板传来的目标制动力。ABS控制器的输入信号为车速和各个车轮的轮速,输出信号为各个制动器的目标制动力[5]。
防抱死控制策略是ABS的核心,汽车制动防抱死系统(ABS)的控制目标是把车轮的滑移率限制在对应最大路面附着系数的范围之内,从而使车辆获得最大的地面制动力。现在汽车防抱死制动系统的控制方法很多,在产品中应用较广的主要是逻辑门限值控制方法,但该方法降低了汽车的制动平顺性。由于车辆制动过程的非线性和时变性,使得经典控制方法不能完全适应汽车ABS的工作过程;现代控制方法中PID控制虽然算法简单,但是可靠性高。常规PID控制的缺点是,对于具有非线性、时变不确定性以及难以建立精确数学模型的系统,往往受到参数整定方法的限制,对运行工况的适应性差。模糊控制具有鲁棒性强的优点,能较好地适应车辆路况突变等干扰,但是单纯的模糊控制不能很好地消除系统的稳态误差。模糊PID控制结合了模糊控制和PID控制两者的优点,控制精度高,抗干扰能力强,实现较为简单。因此,本文选用模糊PID控制作为防抱死控制策略。
3.2 汽车EMBS的ABS模糊PID控制算法
模糊PID控制器原理结构图如图3所示。模糊控制器输入参数为车轮滑移率误差e和滑移率误差的变化ec,通过模糊逻辑生成PID控制器的三个参数Kp、Ki 、Kd 。

图3 模糊PID控制原理框图
参数e和 ec的模糊子集均为{负大,负中,负小,零,正小,正中,正大},表示为{NB,NM,NS,ZE,PS,PM,PB},而Kp 、Ki、Kd的模糊子集为{零,小,中,大},表示为{Z,S,M,B},所有变量的论域为{-6,-4,-2,0,2,4,6}。
PID控制器三个参数中比例系数Kp的作用在于加快系统的响应速度,积分系数Ki的作用在于消除系统的稳态误差,微分系数Kd的作用在于改善系统的动态特性,抑制系统较大波动。在系统误差e 较大时,为加快系统响应速度,避免因e 瞬间变化大而引起微分饱和,应采用较大的比例系数Kp 和较小微分系数Kd,同时避免系统过分超调,应限制积分系数Ki,通常取Ki=0;在系统误差e中等大小时,为使系统响应的超调减少,同时保证系统的响应速度,应减小Kp 值,并且Ki的取值要适当,这种情况下Kd 的取值对系统影响较大,一般根据ec 的取值经验;当ec 较大时,Kd可取稍小;ec 较小时,Kd 可取稍大;在系统误差e 较小,接近稳定时,为减小系统稳态误差应采用较大的积分系数Ki ,较小的比例系数Kp,较小的微分系数Kd 。根据此制定模糊规则如表1所示。
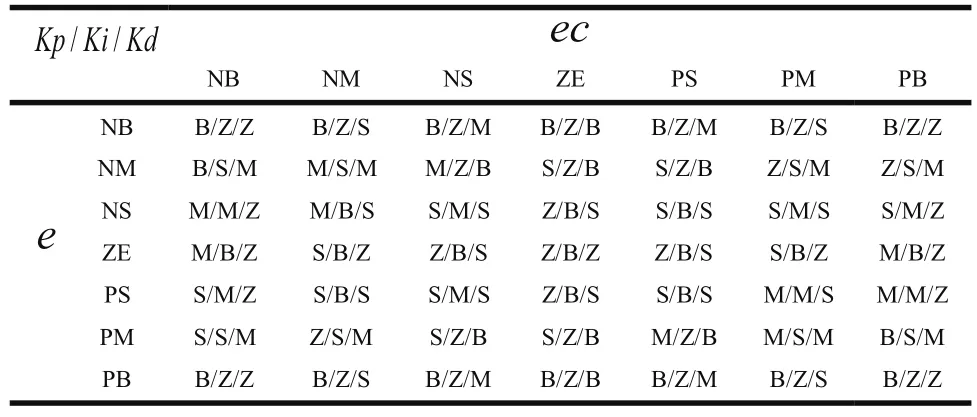
表1 模糊控制器模糊规则表
4 防抱死模糊PID控制算法仿真分析
本文在Matlab/Simulink环境下,根据给出的车辆单轮模型和EMB执行器模型,利用simulink工具箱,建立了仿真模型,并进行子系统封装处理,插入基于模糊PID算法的仿真模型中,对典型路况进行仿真,仿真所用参数如表2所示。
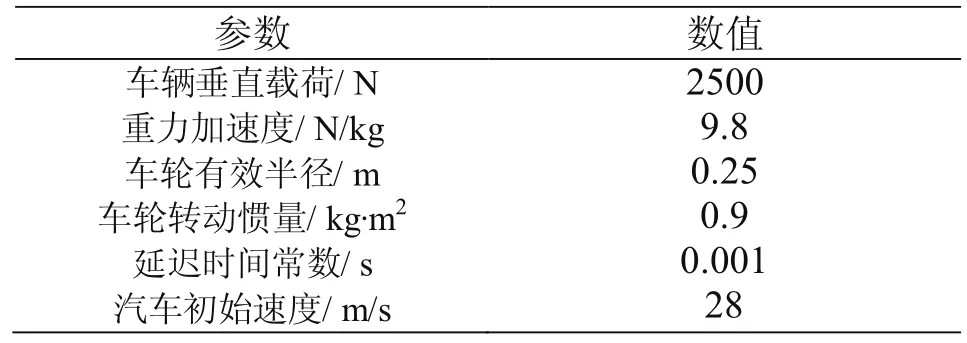
表2 汽车单轮模型相关参数
图4、图5分别为模糊PID控制算法仿真模型和车辆的车速、制动距离、滑移率仿真效果图。

图4 模糊控制算法仿真模型图
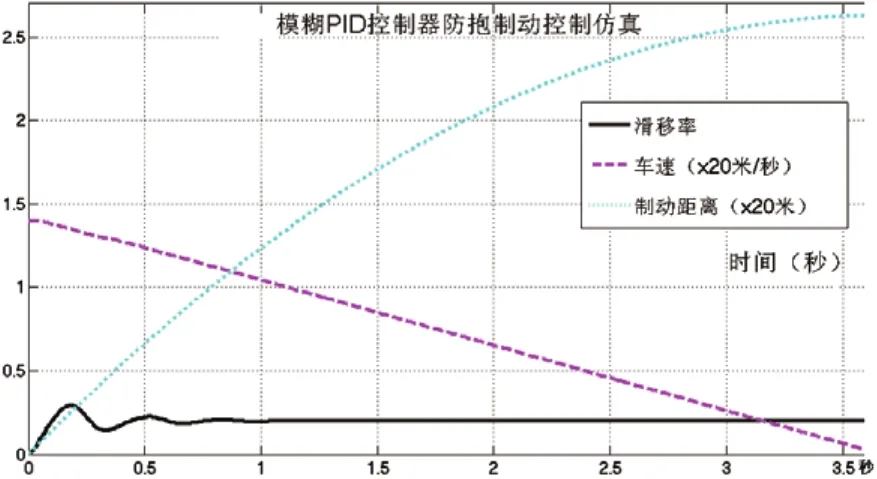
图5 模糊PID控制算法仿真效果图
设定初始车速为28m/s,即时速大约100公里,车辆开始制动并立即进入ABS状态,使用模糊PID控制器,制动时间为3.64s,制动距离为52.98m,滑移性能较好,把车轮滑移率精确地控制在目标滑移率附近,兼顾了鲁棒性和控制精度,可以达到理想的制动控制状态。
5 结论
根据建立的EMB系统相关模型和汽车制动防抱死控制原理,给出了汽车ABS模糊PID防抱死控制策略,通过Matlab的Simulink工具箱对电子机械制动防抱死系统建立了系统仿真模型,仿真结果表明,模糊PID防抱死控制响应时间较短,稳态性能较好,把车轮滑移率精确地控制在目标滑移率附近,兼顾了鲁棒性和控制精度,可以达到理想的制动控制状态。
[1]李文娟,赵梦莹,高小丽,等.汽车ABS自寻最优控制器的模拟研究[J].伺服控制,2010,(02):45-48.
[2]刘辉.车辆防抱制动系统仿真与实验研究[D].合肥:合肥工业大学,2006.
[3]李林,李仲兴,陈昆山.汽车ABS模糊控制方法的分析与仿真[J].江苏大学学报(自然科学版),2003, 24(3).
[4]林逸,沈沉,王军.线控制动系统防抱死特性模糊控制方法的仿真研究[J],公路交通科技,2006,(10):124-127.
[5]杨坤,李静,李幼德,等.基于汽车电子机械制动系统EBD/ABS研究[J],系统仿真学报,2009,(3):1785-1788.
