全机器人胸腔肿物切除术的临床应用
2012-10-11温佳新初向阳张连斌
温佳新,初向阳,张连斌,王 波
解放军总医院 胸外科,北京 100853
Da Vinci S手术操作系统在2000年获得FDA认证,允许将其用于临床医疗。至今全世界共有2 031台。2005年我国香港威尔士亲王医院引进第一台,大陆地区由我院在2006年首次引进,此后北京、上海、南京、沈阳、香港等地多家医院陆续引进。截止2011年9月全国共开展手术超过2 000例,主要应用于心脏外科、泌尿外科、普外科(肝胆及胃肠)、妇产科及胸外科的手术。Da Vinci S在胸部外科的发展较慢,近两年病例报道逐渐增多,现将我科2011年9-10月完成的4例全机器人下胸腔肿物切除术进行总结。
资料和方法
1 临床资料 4例患者因胸腔占位入住我科,均无不适主诉,既往体健。男性2例,女性2例。年龄41-59岁。术前诊断分别为右前上纵隔占位2例(图1、2),左前下纵隔占位1例(图3)、左后胸壁肿物1例(图4)。
2 术前准备及麻醉 术前准备与常规开胸手术一致。麻醉采用基础加全麻的方法。双腔气管插管,健侧肺单肺通气。
3 手术方法 1)体位:均采取胸部手术常用体位,即侧卧位,体位塑型垫固定体位,根据肿物的位置适当调整体位角度。2)Trocar定位:通过术前CT检查大致确定肿物在体表的投影位置。在床旁机械臂系统的中轴和肿物的延长线上(远于肿物20cm)确定第一个Trocar的位置,在此位置两侧,距离10cm以上,对称确定另外两个Trocar的位置(图5、6)。选取左胸壁腋中线第六肋间(例1、2)、右胸壁腋中线第5肋间(例3)、右胸壁腋前线第4肋间(例4)作长约2cm切孔作为观察孔,应用“气腹机”经Trocar持续向胸腔泵入CO2(图7),促进肺萎陷,提供足够的操作空间。置入Camera,观察有无胸腔粘连及肿瘤位置,根据情况确定相应的两个操作孔(长约1cm)的位置。3)术中操作:左臂放置双极“Cadiere钳(CA)”,右臂放置单极“电凝钩”(图8),通过3D目镜观察两个操作臂,两臂放置位置以器械前端(包括关节部位)及肿瘤同时在目镜视野内为宜。应用Cadiere钳暴露,首先将肿物周边胸膜提起,电凝钩逐步离断,暴露肿物。钳夹肿物提起,沿肿物边缘逐步离断于周围组织。前纵隔肿物充分暴露膈神经及上腔静脉,注意保护,避免损伤。后胸部肿物避开肋间神经及肋间动脉。肿物完整切除后,3例前纵隔肿物患者继续清扫纵隔周围脂肪组织,切除过程遇到出血时,Cadiere钳钳夹后电凝止血即可。应用腔镜专用取物袋将标本取出。再次检查操作创面无活动性出血,于观察孔位置放置30号胸腔闭式引流管,结束手术。
结 果
4例患者均顺利完成手术,无一例中转开胸。术后病理回报分别为:胸腺瘤(AB型)、胸腺囊肿、脂肪瘤样增生、神经鞘瘤。平均手术时间为120min,术中平均出血量55ml,术后下床活动时间平均为2.5d,胸腔闭式引流管拔除时间平均为2.75d,平均住院日为9.25d,见表1。术后半个月、1个月、2个月分别对4例患者随访。除例2外,其他患者术后半个月胸壁切口疼痛不适均已消失。例2在1个月随访时,不适基本缓解。
讨 论
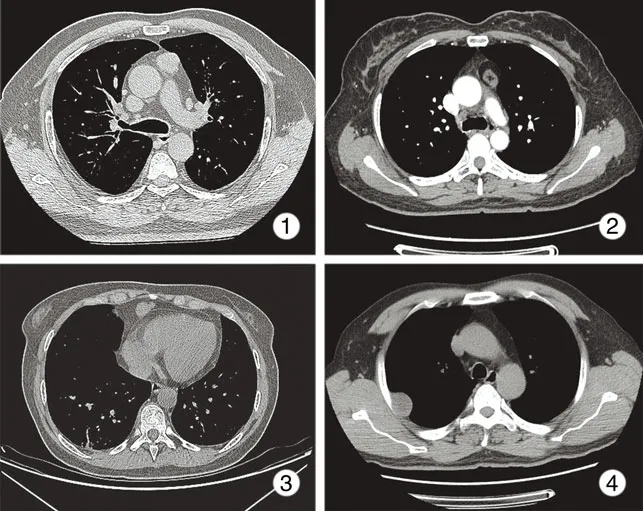
图1 例1右前上纵膈占位(3cm×2cm)图2 例2右前上纵膈占位(3cm×3cm)图3 例3右前下纵膈异常淋巴结(2.5cm×1.5cm)图4 例4右后胸壁肿物(4cm×2cm)Fig 1 Case 1: Tumor in right anterior superior mediastinum(3cm×2cm)Fig 2 Case 2: Tumor in right anterior superior mediastinum(3cm×3cm)Fig 3 Case 3: Tumor in right anterior lower mediastinum(2.5cm×1.5cm)Fig 4 Case 4: Tumor on right chest wall(4cm×2cm)
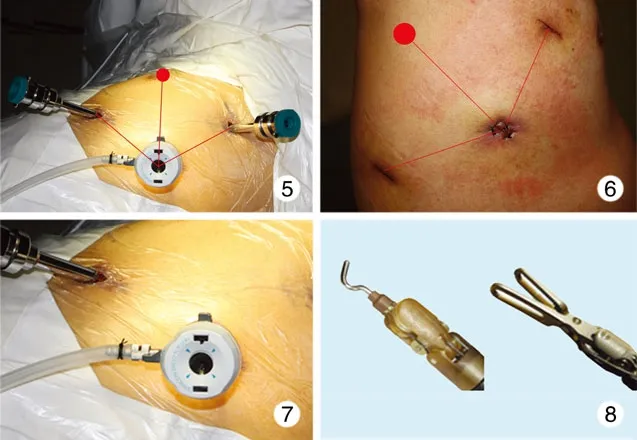
图5-6 肿物及Trocar的位置关系图7 经Trocar向胸腔泵入CO2图8 电凝钩和Cadiere钳Fig 5-6 Relationship between tumor and trocar locationFig 7 CO2 pumped into chest through trocarFig 8 Electrocoagulation hook and cadiere forceps
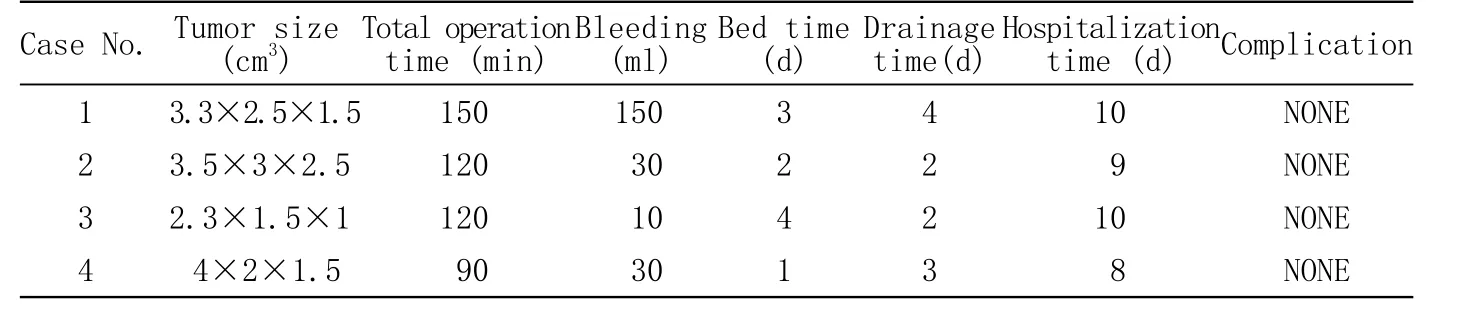
表1 术后资料Tab1 Parameters after operation
目前,胸外科获得美国FDA许可已开展的临床手术有:肺叶切除、食管膈肌疝修补术、食管切除、胸腺切除、纵隔肿瘤切除、肺大泡切除、食管反流手术。第1例全机器人肺叶切除是2000年由Okada等完成并报道[1],随后在2004年Melfi等报道12例全机器人普胸外科手术[2],2006年Park等报道了34例全机器人肺叶切除,这34例囊括了所有肺叶的切除,并均进行了系统的淋巴结清扫[3]。对于纵隔肿瘤,2001年Yoshino等报道了第1例全机器人胸腺瘤切除[4],随后Ruurda、Ashton、Bodner等先后报道了胸腔肿瘤经全机器人切除[5-8]。目前认为,纵隔肿瘤切除、胸壁肿物切除、胸腺切除及纵隔脂肪组织清扫是最能体现机器人优势的手术[9]。我们对胸腔肿物经全机器人切除进行了初步尝试,体会如下:1)经验积累:我们认为,Da Vinci S手术系统作为一个新的手术操作方式,跟以往的手术方式有很大不同,对术者要求较高。术者需有丰富的常规开胸手术及胸腔镜手术经验,并经过Da Vinci S手术系统的培训后,尝试进行全机器人手术才能更加安全、得心应手。另外,术者、助手及器械护士间的配合经验也很重要,就本文4例手术的经验,术前准备时间、术中更换器械时间、术者操作时间都随着熟练程度的增加而减少,整体的手术时间也逐步缩短。2)病例选择:为保证安全,我们选择相对年轻(平均年龄50岁)、既往体健、肿物大小适中(平均大小约3cm×2cm)的患者,并特意选择了不同部位的胸腔肿物(左前上纵隔、右前上纵隔、后胸壁)进行尝试,结果表明,Da Vinci S系统在胸腔不同部位的表现都很出色,均能顺利的将肿物暴露并切除,如肿物位于心膈角附近、后胸壁等,这些位置行胸腔镜手术切除可能会遇到很大困难。但应用Da Vinci S系统操作很简单;这得益于其30°镜的3D成像系统及拥有7个活动度的EndoWrist可转腕器械。这也正是Da Vinci S系统的优势所在。3)患者术后恢复:虽然没有大量病例对比,但此4例术中出血量、术后活动时间、拔管时间、住院时间等指标均优于常规开胸及VATS术式。1例患者出现术后疼痛,分析认为可能是术中机械臂动作过大造成Trocar挤压肋间所致。由于Da Vinci S系统灵活性较高,系统触觉反馈缺失,易造成机械臂动作过大,故在初期手术时,应动作缓慢轻柔,逐步移动机械臂,切忌动作幅度过大,避免造成损伤。4例手术时间平均120min,而常规手术及胸腔镜手术的时间平均为50min。分析认为是对Da Vinci S系统不熟炼造成手术时间过长,随着手术逐步开展,熟练程度不断提高,可缩短手术时间。4)手术体位及Trocar定位:体位和Trocar的位置在机器人手术中十分重要,较好的位置可以给机械臂提供最充分施展的空间,避免机械臂及器械间的相互影响。在Intuitive Surgical公司给出的Da Vinci手术系统在胸外科手术应用指南上建议手术体位为侧卧位,两臂呈“游泳”姿势,将腋下充分暴露。调整手术台呈头低脚低型,尽量使术侧胸壁与地面平行。也有报道采用平卧位进行手术[10]。本文4例均采用侧卧位,体位塑型垫固定体位。根据肿物位置作适当的调整。我们认为这样的体位是胸外科医生最熟悉的体位,而且患者双臂放松,自然体位,减少患者术后肩背部的酸痛不适感。Trocar位置的确定可以说是整个手术的关键步骤,位置选取的合适与否,直接影响到手术的难易程度[11]。5)机器人手术系统的局限性:尽管在诸多方面Da Vinci S手术操作系统均表现出优越性,但其局限性也不可忽略。首先是触觉反馈的缺失,使术者无法判断组织的质地、弹性等。尤其在结扎血管等重要操作时,术者只能靠视觉判断结扎的情况,也正是这个原因,增加其在肺叶切除等复杂手术中应用的风险。另外,整套系统及维护费用都很昂贵。学习时间也较长,对术者经验的要求较高,这些因素不利于该系统的推广普及。
总之,Da Vinci S手术操作系统在胸外科的应用还处于探索阶段,相信随着手术的不断开展,经验不断积累,技术不断更新,Da Vinci S手术系统在胸外科手术中的优势会越来越明显。
1 Okada S, Sugawara H, Tanaba Y, et al. Thoracoscopic major lung resection using a newly developed instrument retraction system and a voice-controlled robot[J]. Kyobu Geka,2000,53(10):862-865.
2 Melfi FM,Menconi GF,Mariani AM,et al. Early experience with robotic technology for thoracoscopic surgery[J]. Eur J Cardiothorac Surg,2002,21(5):864-868.
3 Park BJ,Flores RM,Rusch VW. Robotic assistance for videoassisted thoracic surgical lobectomy:technique and initial results[J]. J Thorac Cardiovasc Surg,2006,131(1):54-59.
4 Yoshino I,Hashizume M,Shimada M,et al. Thoracoscopic thymomectomy with the da vinci computer-enhanced surgical system[J]. J Thorac Cardiovasc Surg,2001,122(4):783-785.
5 Ruurda JP,Hanlo PW,Hennipman A,et al. Robot-assisted thoracoscopic resection of a benign mediastinal neurogenic tumor:technical note[J]. Neurosurgery,2003,52(2):462-464.
6 Ashton RC,Mcginnis KM,Connery CP,et al. Totally endoscopic robotic thymectomy for myasthenia gravis[J]. Ann Thorac Surg,2003,5(2):569-571.
7 Bodner J,Wykypiel H,Wetscher G,et al. First experiences with the da vinci operating robot in thoracic surgery[J]. Eur J Cardiothorac Surg,2004,25(5):844-851.
8 Bodner J,Wykypiel H,Greiner A,et al. Early experience with robot-assisted surgery for mediastinal masses[J]. Ann Thorac Surg,2004,78(1):259-265.
9 Rea F, Marulli G, Bortolotti L, et al. Experience with the “da Vinci”robotic system for thymectomy in patients with myasthenia gravis:report of 33 cases[J]. Ann Thorac Surg,2006,81(2):455-459.
10 黄佳,罗清泉,方文涛,等.机器人外科手术系统辅助治疗纵隔肿瘤的初步经验[J] .上海医学,2011,34(1):47-50.
11 易俊,董国华,许飚,等.达芬奇-S外科手术辅助系统在普胸外科的应用[J] .医学研究生学报,2011,24(7):696-699.
