光电跟踪伺服系统中的模型参考自适应控制
2012-10-10林森,陈娟
林 森, 陈 娟
(长春工业大学 电气与电子工程学院,吉林 长春 130012)
0 引 言
目前随着运动目标速度、加速度的提升,对光电跟踪伺服系统的精度要求也越来越高。现有的控制算法已经很难满足对高速度和高加速度运动物体的跟踪。文中在前人研究成果基础上,对速度环进行模型参考自适应控制,在速度环的设计中,利用数学建模的方法得出速度环的实际模型。根据得出的实际模型,应用MIT原理建立理想模型以及推导出自适应律。再根据模型参考自适应控制原理,在 MATLAB/Simulink软件环境下,画出系统的仿真框图,进行仿真验证。得出实际模型与参考模型输出波形的对比及误差分析,从而提高光电跟踪的精度。
1 光电跟踪伺服系统
光电跟踪系统是一种跟踪测量系统,主要包括光学系统、跟踪伺服系统、测角测速系统和记录系统4个主要部分。它的工作原理是当目标进入视场内,伺服系统捕获锁定目标,然后一直跟踪目标,保证目标一直位于光学测量的视场内,记录系统同时记下目标相对视场中心的偏差——脱靶量,测角系统测量出视场中心的方位角和高低角,与脱靶量共同合成目标的实际角位置。
采用加速度滞后补偿控制的光电跟踪伺服系统结构如图1所示。
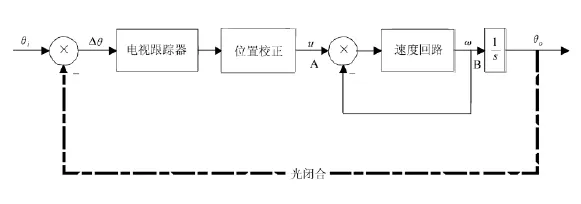
图1 光电跟踪伺服系统框图
图1中,θi为目标输入,将跟踪架的速度ω和位置输出θo做负反馈。Δθ为跟踪位置误差,即电视脱靶量。
现代光电跟踪系统大多采用位置环加速度环的双环控制模式,这里仅对速度环采用模型参考自适应控制。
2 模型参考自适应控制
2.1 模型参考自适应控制原理
模型参考自适应控制(Model Reference Adaptive Control,MRAC)是从模型跟踪问题或模型参考控制问题引申来的。模型参考在对象参数未知的情况下是不可行的。MRAC中处理这种情况的主要方法是采用确定等价法,即用参数估计值代替控制律中的未知参数,从而得到MRAC结构。模型参考自适应控制系统原理如图2所示。
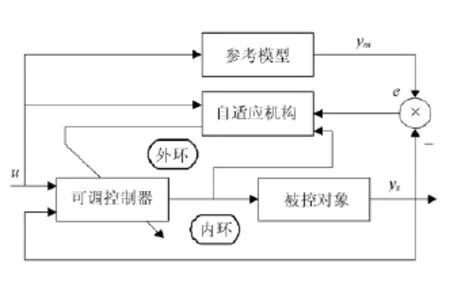
图2 模型参考自适应控制系统原理
图2中,MRAC系统由两个环路组成,即内环和外环。内环与常规反馈系统类似,由被控对象和可调控制器组成,称为可调系统;外环是调整可调控制器参数的自适应回路,其中的参考模型与可调系统并联。由于加在可调系统的参考输入信号同时也加到了参考模型的输入端,所有参考模型的输出或状态可用来规定希望的性能指标。因此,MRAC的基本工作原理为:根据被控对象结构和具体控制性能要求设计参考模型,使其输出ym表达对参考输入θi的期望响应;然后在每个控制周期内,将参考模型输出ym与被控对象输出ys直接相减,得到广义误差信号e=ym-ys,自适应根据一定的准则,利用广义误差信号来修改可调控制器参数,即产生一个自适应控制律,使e趋向于零,也就是使对象实际输出向参考模型输出靠近,最终达到完全一致。
这里采用模型参考自适应控制方法来控制光电跟踪系统。把光电跟踪系统的速度、加速度模型作为理想的参考模型,用自适应控制来调节扰动量,与理想模型比较,通过调节可调系统的增益,使实际模型与理想模型的误差趋于0。
2.2 自适应控制律的推导
设理想模型的传递函数为:

被控系统的传递函数为:

定义广义误差为

式中:ym——理想模型的输出;
yp——被控系统的输出。
广义误差e为当参考模型与被控系统的输入信号同为u时,理想模型的响应与被控系统的响应之间的偏差。
选取性能指标泛函为:

通过调整可调增益Kc,使性能指标J达到最小值。若采用梯度法寻优,则首先求出J对Kc的梯度。

根据梯度法可知,Kc值应沿梯度下降的方向移动,在一定的步距下,Kc的变化量ΔKc将取数值为:

式中:λ>0,调整后的Kc为:

式中:Kc0——可调增益Kc的初始值,ΔKc=Kc-Kc0。
为了获得调整Kc的自适应律,上式两边对时间t求导得:


将上式变形为:

将频域方程式(10)进行拉普拉斯反变换为时域方程:

式中:p——微分算子。
将方程两边对Kc求导数得:

而理想模型的输出与输入之间有下列关系:


式中:
这就是可调增益Kc的调节规律,也是系统的自适应规律。
MIT自适应控制方案如图3所示。
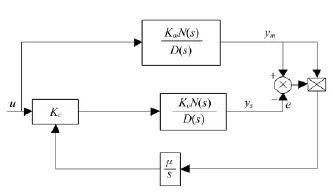
图3 MIT自适应控制方案
这样综合出来的模型参考闭环自适应系统的数学模型可用下列一组方程来描述:
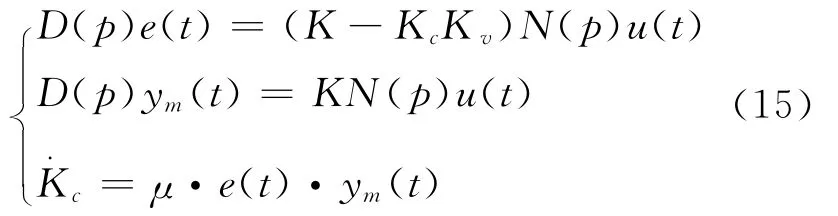
式中,第一个方程为开环广义误差方程,第二个方程为理想参考模型方程,第三个方程为可调增益的自适应调整规律。
3 速度回路中模型参考自适应控制
3.1 模型建立
在光电跟踪伺服控制系统中,速度环主要由PWM功率放大环节、跟踪架环节、数字脉冲调宽环节组成,速度环模型如图4所示。
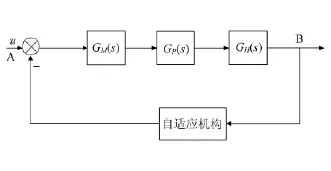
图4 速度环模型
PWM功率放大环节GP(s)是一个比例环节KP。
控制对象是跟踪架,为了提高机械谐振频率,一般采用力矩电机和跟踪架直接耦合传动方式,在不考虑高频谐振时,其传递函数为:

式中:TM——机电时间常数;
Te——电气时间常数;
Ke——电机反电势系数。
数字脉冲调宽环节GH(s)是一个采样保持环节,当PWM执行频率很高时可以等效为一个惯性环节。

经公式计算和仿真验证得到速度回路的传递函数为:

3.2 仿真与实验结果
仿真模型中参考模型选用已经计算出来的传递函数。用示波器来观察参考模型和实际模型的输出波形,这样可以实时监控系统波形变化。实际参考模型最后通过PWM功放来控制电机转台,使其跟踪目标。
MIT规则比较简单,也比较容易实现。在系统设计时必须十分注意,以防系统出现不稳定的现象。
跟踪系统中理想的传递函数是:

可调系统的控制模型为:

将理想模型的传递函数转化为:

将式(21)应用MIT控制律得:
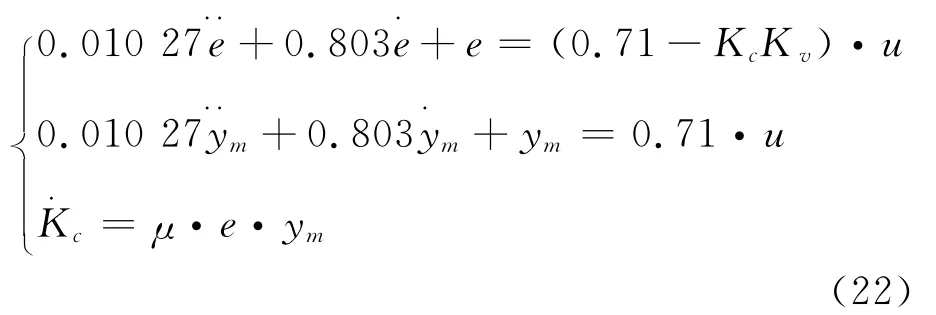
假设该系统输入信号u为阶跃信号,幅值为10,Kv的可能变化范围为0.6~1.2,根据上式可以得到:

形如式(23)的方程可以看作是一个三阶系统,根据劳斯判据,要使该自适应闭环系统稳定,必须满足:

也就是说,根据Kv的变化范围可知,系统稳定的条件是

对该跟踪自适应控制系统运用MATLAB软件中的Simulink模拟系统进行仿真实验,得到仿真图如图5所示。
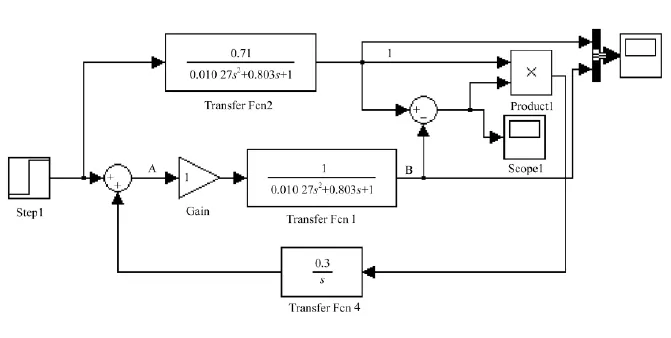
图5 MIT系统仿真图
3.3 实验结果
提出了用模型参考自适应方法来对速度环进行控制。通过采用MIT稳定性原理推导出自适应控制律。应用 MATLAB/Simulink仿真软件进行了系统仿真模型的建立,并得出实际模型与参考模型的输出波形。通过实验结果可以得出,当系统输入u=10,μ=0.3时,系统输出如图6所示。
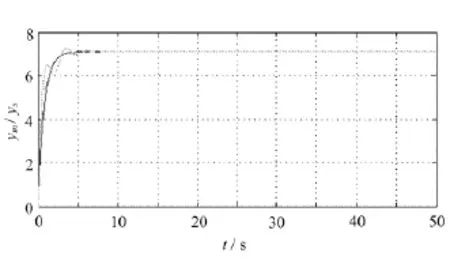
图6 传递函数仿真曲线
从图中可以看出系统稳定,这是因为μ满足稳定性条件。
误差仿真曲线如图7所示。
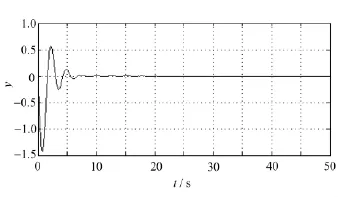
图7 误差仿真曲线
从图7中可以看出,由于参考模型与实际模型有差异,在前几秒中系统通过自适应律调节被控系统,使被控系统与理想输出波形无限接近,最终使输出误差为零。实际波形与理想输出波形几乎同时达到稳态值,结合误差曲线等各项指标得出系统符合原设计要求。
按照MIT理论,如果自适应增益过大,或者输入信号的幅值过大,都有可能使系统不稳定。为了验证这一点,取μ=10,u=50,得到系统的阶跃响应曲线如图8所示。
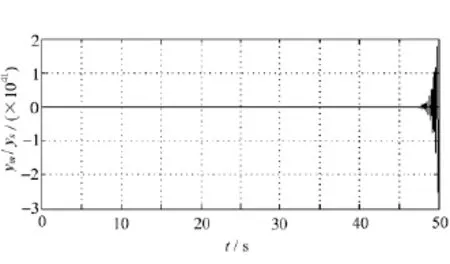
图8 μ=10,幅值为50时系统的仿真曲线
从图中可以看出系统是不稳定的。
4 结 语
针对光电跟踪伺服系统速度环采取模型参考自适应控制。在模型参考自适应控制中,控制律的推导是文中的核心部分,控制律决定了系统的精度问题。在光电跟踪伺服系统中,对精度的要求很高,而模型参考自适应控制有效地提高了精度。从实验结果可以看出,在静态过程中被控对象与参考模型之间的广义误差为零,达到了预期的效果。
[1]董宁.自适应控制[M].北京:北京理工大学出版社,2009.
[2]庞中华,崔红.系统辨识与自适应控制MATLAB仿真[M].北京:北京航空航天大学出版社,2009.
[3]Torben Andersen.The servo system of the EISCAT svalbard antenna[J].SPIE,1995,2479:301-312.
[4]胡寿松.自动控制原理[M].4版.北京:国防工业出版社,2001.
[5]王建立,吉桐伯.加速度滞后补偿提高光电跟踪系统跟踪精度的方法[J].光学精密工程,2005,13(6):681-685.
[6]王建立.提高光电经纬仪跟踪快速运动目标能力的一种方法[J].光电工程,2002,29(1):34-37.
[7]王虎,陈娟,尹立鹏,等.光电跟踪系统中的伺服控制技术[J].长春工业大学学报:自然科学版,2009,30(5):533-539.
