一种改进的自适应中值滤波方法
2012-10-10姚文伟张智斌
姚文伟, 张智斌
(昆明理工大学信息工程与自动化学院,云南 昆明 650500)
在实际应用中,信号和噪声总是同时存在(夏良正等,2005)。对图像中所混有的噪声进行滤除,抑制噪声就成了图像处理中一个非常重要的问题。去噪效果的好坏直接影响到后续的图像处理工作,如图像分割、边缘检测等。
图像信号在产生、传输过程中都可能会受到噪声的污染,一般数字图像系统中的常见噪声主要有高斯噪声、椒盐噪声、加性噪声、乘性噪声等。图像常用噪声滤波分为线性滤波和非线性滤波两类。中值滤波是由Tukey在1970s初提出的一种非线性滤波方法,能有效地滤除脉冲、椒盐噪声(Huang,1997)。传统标准的中值滤波(Standard Mediam Filter,简称SMF)算法的窗口是预先设定的,不能根据噪声密度自适应改变窗口大小,很难满足图像跟踪系统的实时性要求,它要对每个窗口内的所有像素进行排序求中值,导致时间复杂度增大,把窗口图像中所有像素值用其领域中值来代替,损失了图像中大量的细微的纹理和边缘特征信息,而使图像变模糊(吴连喜等,2004)。
在图像处理中,为了有效滤除噪声,同时保护图像边缘等细节,不使图像变得模糊,很多学者做了大量研究,一些改进的中值滤波方法相继被提出,如加权多级中值滤波法(钱晶清等,2000),中心加权中值滤波(Brownrigg,1984),一种自适应的中值滤波(Hwang,1995)算法(Ranked-order Adaptive Median Filter,RAMF)。该算法采用不同大小的窗口对像素点进行噪声判别,与传统中值滤波相比,能有效地保护图像细节。由于简单的认为噪声点就是区域内的极值点,可能导致将边缘信息点误判为极值点,从而误判为噪声点。
针对自适应中值滤波(RAMF)算法存在的问题,本文提出一种改进的自适应中值滤波算法(Improved Ranked-order Adaptive Median Filter,简称IRAMF),该算法引入最小几何距离测度(Mininum Set Distance,简称MSD),有效避免将一些高频信号误判为噪声信号。同时噪声检测只针对当前待测点,不判断中值是否为噪声,待测点可疑时扩大窗口,减少求中值的排序操作,降低时间复杂度。
1 自适应中值滤波算法(RAMF)
自适应中值滤波算法可根据噪声密度改变滤波窗口的大小,并对噪声点和图像信号点采取不同的处理方法。对噪声点进行中值滤波,对信号点则保持其灰度值不变,其滤波步骤如下。
设图像大小为M×N,(i,j)为一图像信号点P的坐标,f(i,j)为该P点对应的灰度值,W(i,j)为以像素点P为中心的方形滤波窗口(初始窗口一般可取3 ×3),fmin,fmax和fmed分别为W(i,j)中的灰度最小值、最大值和中值。Wmax为预设的允许最大窗口。则RAMF算法的具体实现分以下2步。
(1)若fmin<fmed<fmax,则转至第2步;否则增大窗口W(i,j)的尺寸。若W(i,j)的尺寸小于Wmax的尺寸,则重复第1步;否则输出f(i,j)。
(2)若 fmin< f(i,j)< fmax,则输出 f(i,j),否则输出fmed。
分析可以看出,该算法中,噪声点的检测和判定是以fmin和fmax为基准的,如果fmed∈(fmin,fmax),表明fmed不是噪声。如果像素点P的灰度满足f(i,j)=fmin或f(i,j)=fmax时,则被认定为噪声点,因为噪声点的灰度值通常是局部最小值或局部最大值。对图像信号点的处理则采用以下2种方式:(1)如果在滤波窗口达到最大Wmax时仍没有中值输出(即fmin<fmed<fmax的条件不满足),则对像素点P不予滤波,直接输出f(i,j),不论它是否为噪声点;(2)如果滤波窗口有中值输出,那么再判断像素点P是否为噪声点,如果是噪声点,则采用标准中值滤波算法输出,否则保持原灰度值f(i,j)不变,并优先输出。
这样的噪声点检测方法,主要存在以下3点不足:①噪声点检测时,容易把满足f(i,j)=fmin或f(i,j)=fmax条件的图像边缘等一些高频信号点误认为噪声点,这就会损失一些边缘信息;②在滤波窗口达到最大Wmax时仍没有中值输出,则对像素点P不予滤波,直接输出当前灰度值,这就导致了一部分噪声点不能被滤除,滤波质量下降;③对于满足滤波条件(fmin<f(i,j)<fmax)的噪声点,采取了标准中值滤波的方法,用滤窗中值fmed代替噪声点的灰度值输出,这同样造成了图像的边界模糊或缺失。
2 改进自适应中值滤波算法
针对上述自适应中值滤波算法存在的不足,本文作如下改进。
(1)为避免将高频信号点误判为噪声点,引入最小集合距离MSD。灰度值为f(i,j)的像素与集合A的MSD定义为:

其中,A表示当前领域内未污染点的集合。MSD反映了像素值与未污染集合元素的相关性。MSD越小,相关性越大,表明f(i,j)为未污染点的可能性越高。当MSD小于某一个数阀值k时,可认为f(i,j)为未污染点。对于像素点f(i,j),只有当fmin<f(i,j)<fmax条件不满足时,才通过式(1)的MSD来判断其是否为高频信号点,因此不需要计算f(i,j)与集合A中所有未污染点的MSD。当fmin<f(i,j)<fmax条件满足时式(1)就变为:

其中Amax和Amin分别是集合A中的最大值和最小值。
(2)在噪声点恢复时,采用未污染点,即噪声点的输出为当前像素点领域内未污染点集合A的中值。大的滤波窗口,平滑作用强;小的滤波窗口,能较好的保持图像细节。IRAMF算法中,噪声点的检测判定窗口可以增大,但未污染点集合A保持不变,以保证A对应的窗口最小。
(3)窗口扩大的条件修改为,如果当前像素点为可疑噪声则扩大窗口,仅在恢复噪声点时才计算最小未污染点集合的中值。
改进的自适应中值滤波算法具体实现步骤如下:
①设定初始窗口W(i,j)大小为3。未污染点集合A初始为空。
②对当前像素点P,求出其工作窗口内的灰度最小和最大值 fmin,fmax。
③若fmin< f(i,j)<fmax,则满足该灰度值f(i,j)对应的P点就为信号点,输出f(i,j),然后转步骤⑦;否则判断未污染点集合A是否为空,若为空,则将W(i,j)中未污染点包含进来。
④若窗口W(i,j)边长W小于最大窗口尺寸Wmax,即W < Wmax,增大窗口,令W=W+2,转步骤②。
⑤若W≥Wmax,然后判断A是否为空,若为空,则输出f(i,j)然后转步骤⑦;否则按式(2)计算MSD。
⑥若MSD<k,则P点为信号点,滤波输出f(i,j);否则认为P为噪声点,滤波输出A的中值Amed。
⑦若窗口内所有像素处理完毕,则结束;否则转步骤②继续执行。
3 实验结果及分析
本文实验环境如下:CPU为 Pentium 4 2.80 GHz,内存为 512 Mb,操作系统为 Window XP,软件环境是Visual Studio 2008和OpenCV2.1。实验时,用Matlab7.0给256×256的 lena图像分别添加10%,50%和90%的椒盐噪声。一般的,椒盐噪声干扰通常比图像信号的强度大,在一幅图像中椒盐噪声总是数字化为允许的最大值和最小值(陈科等,2008)然后分别用5×5中值滤波SMF算法、自适应中值滤波RAMF算法和改进自适应中值滤波IRAMF算法对其进行滤波处理,以检测三种滤波方法在不同的噪声密度下的滤噪性能。采用峰值信噪比PSNR作为评价标准(卫保国,2008)。
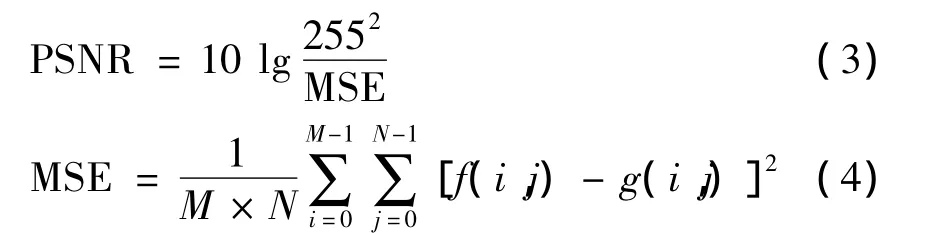
式中f(i,j)为原图形的像素值,g(i,j)为滤波后图像的输出值。在不同的噪声密度下,3种不同滤波方法的PSNR值比较如表1所示。
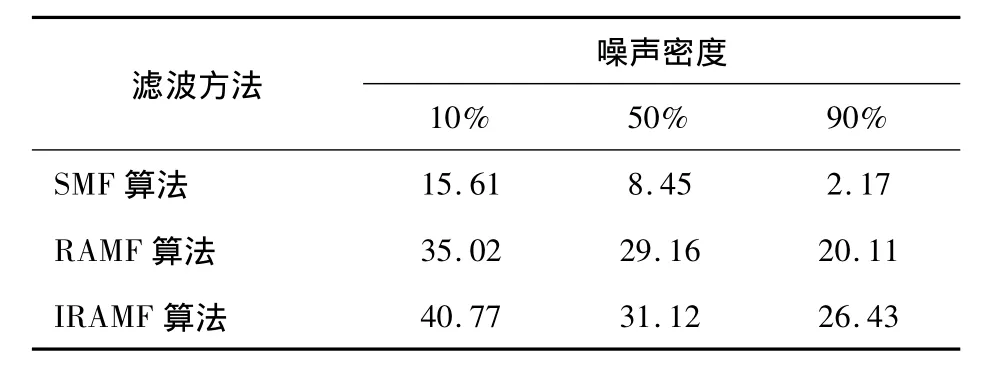
表1 3种滤波方法在不同噪声密度下的PSNR比较Table1 PSNR with different noise density of three filter methods
3种算法的滤波效果如图1所示。实验中,自适应算法的窗口最大尺寸为10,MSD阀值k取2。
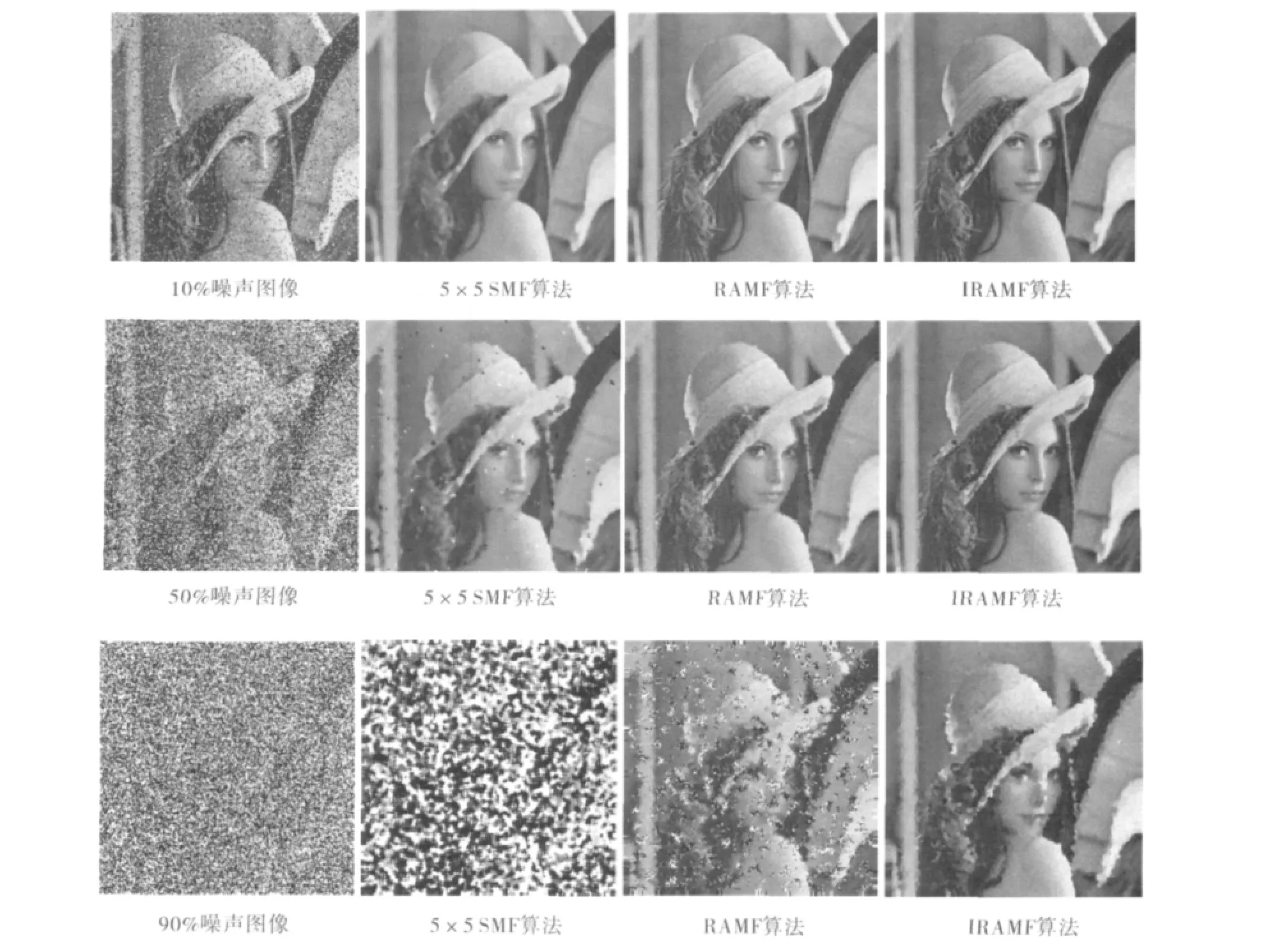
图1 3种算法的滤波效果比较Fig.1 Filtering effects of three algorithms
由图1可以看出,对于5×5中值滤波,由于工作窗口大小不变,当噪声密度较大时,取的中值仍可能是噪声,对处理50%椒盐噪声的图片时,处理后的图片仍有明显的斑点;对于自适应中值滤波,噪声检测时,简单的将像素点划分为信号点和噪声点,这样容易把边缘等一些高频信号点误判为噪声点,在噪声密度比较高的时候尤其突出。在处理低密度噪声时,3种算法都能较好滤除噪声,但对处理高密度噪声时,改进后的自适应算法要显著优于其它两种算法。
4 结论
本文对自适应中值滤波进行改进,实验表明,改进的自适应中值滤波算法引入了表征可疑噪声点与信号点相关性的测度MSD,有效地将高频细节与噪声区分开,并且仅采用未污染点进行中值滤波。在滤除噪声的同时,更好地保护了图像的细节,滤波之后的信噪比也有了较大的提高。
陈科,葛莹,陈晨.2008.基于混合滤波的遥感图像去噪[J].东华理工大学学报:自然科学版,31(3):276-278.
钱晶洁,王欣.2000.加权多级中值滤波[J].山东工业大学学报,10:408-410.
卫保国.2008.一种改进的自适应中值滤波方法[J].计算机应用.28(7):1732-1733.
吴连喜,梁波,刘平辉.2004.消除噪声的rnf图像融合算法[J].东华理工学院学报,27(3):281-284.
夏良正,李久贤.2005.数字图像处理[M].第2版.南京:东南大学出版社,31-160.
Brownrigg D.1984.The weighted median filter[J].CommunicationAssociation ComputerMachine,27(8):807-81.
Huang C C.1997.On The Edge Preserving Smoothing Filter-Southeast Con’97 Engineering New Century[J].Proceedings,IEEE,146-147.
Hwang H,Haddad R A.1995.Adaptive median filters:new algorithms and results[J].IEEE Transaction on Image Processing,4(4):499-50.