“下反”式炮长微光瞄准镜稳像系统的设计与实现
2012-10-08谢志宏宗艳桃
谢志宏,宗艳桃,王 超,汪 熙,刘 佳
(1.装甲兵工程学院控制工程系,北京100072;2.66440部队,河北石家庄050081)
“下反”稳像式炮长瞄准镜利用陀螺仪的定轴性直接稳定光路下部的反射棱镜,通过对光路的合理补偿实现了视场和瞄准线的稳定效果[1-2]。“下反”稳像系统具有结构简单、价格低廉、体积小等突出优点,因此具有广泛的应用价值。但是,“下反”稳像式瞄准镜有一个主要不足,即微光夜视瞄准镜的光路不通过等腰棱镜,无法通过稳定棱镜的方法稳定夜视成像,“稳线”方式所看到的夜视图像仍然会随着车体的抖动而晃动[2],大大影响了乘员观察目标的能力。因此,改进炮长微光瞄准镜的稳像方法,对提高“下反”稳像式瞄准镜的性能以及提高夜战能力具有重要意义。
1 微光稳像系统总体结构设计
稳像工况下,当车体处于静止状态时,火炮轴线与瞄准线重合,陀螺仪输出信号为零;坦克运动中发生振动时,火炮轴线随坦克一起运动,被陀螺仪稳定的瞄准线与火炮轴线分离,陀螺仪组件中的光电码盘实时测量出瞄准线与火炮轴线之间的夹角[2],这个夹角反映了坦克整体的姿态变化。稳像系统就是利用了瞄准线与火炮轴线之间的角度信号,对微光瞄准镜数字化后的视频图像进行反向补偿,从而实现对夜视图像的稳像功能。稳像系统的总体结构如图1所示,主要包括陀螺仪信号采集模块、视频采集模块、DSP电子稳像模块、稳像视频显示模块,其中陀螺仪信号采集模块和DSP电子稳像模块是系统设计的核心部分。

图1 微光稳像系统的总体结构
2 陀螺仪信号采集模块设计
在瞄准镜中,陀螺仪的内外环轴的一端分别固定着一面小反射镜,将2个光源发出的扁平光束反射后穿过格林码盘,硅光电池形成20路二进制数值[2]。为减轻DSP电子稳像模块的工作负担,提高系统的稳定性和实时性,笔者设计了基于 AVR Mega16L单片机的独立的信号采集模块,完成对陀螺仪输出信号的实时采集和相关处理。
2.1 硬件电路设计
陀螺仪信号由炮长瞄准镜和控制盒之间的三通电缆引出,通过74LS373锁存器锁存后由外部中断触发电路控制AVR Mega16L的I/O口进行采集。处理后通过串口发送给DSP,并由8个8位共阳极数码管分别对水平和垂直方向的角度值进行显示。陀螺仪信号采集模块的结构如图2所示。
2.1.1 AVR Mega16L单片机的I/O口分配

图2 基于AVR Mega16L的陀螺仪信号采集模块结构图
AVR Mega16L与外部电路通过I/O口来连接。陀螺仪信号采集模块需要对20路经LS373锁存的数据进行采集,驱动8个8段数码管,并与外部中断电路和串口接口电路相连。为避免额外的硬件电路,最大限度地利用单片机的I/O口,需要对I/O进行合理的分配。模块利用单片机的I/O输入输出功能设置,对部分通用I/O口进行了复用,外部中断和串口通信使用相关端口引脚的第2功能来实现。具体I/O口使用和复用情况如表1所示。

表1 AVR Mega16L单片机I/O口分配表
2.1.2 外部中断触发与信号锁存电路设计
要准确检测陀螺仪输出信号,必须准确检测驱动电流,并将陀螺仪信号瞬时锁存下来。因此笔者采用光耦模块TLP521-1设计了外部中断触发电路,采用3片74LS373设计了对20路信号的锁存电路,如图3所示。
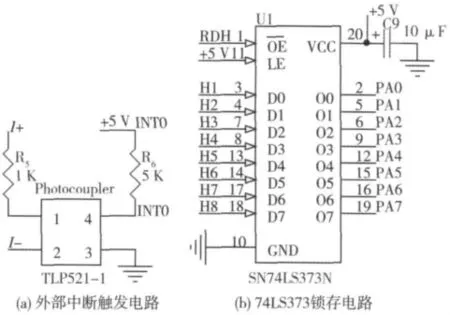
图3 外部中断触发及信号锁存电路
在没有驱动电流时,INT0保持高电平;当驱动电流产生时,光耦TLP521-1的第1和第2管脚相连的发光二极管工作,使得第4和第3管脚相连的三极管导通,INT0产生一个下降沿,触发外部中断。单片机先后使能3片74LS373,分别锁存水平向和高低向的10路陀螺仪信号,再通过 PORTA和PORTC读取信号。
2.2 信号采集模块软件设计
2.2.1 中断优先级设计
为提高系统的准确性和实时性,信号采集模块采用串口接收中断、外部INT0中断和定时器中断分别控制单片机与DSP的串口通信、陀螺仪信号采集和数码管的动态显示。AVR没有中断优先级,当单片机响应一个中断时,全局中断标志禁止,其他中断被屏蔽;但可通过在中断中打开全局中断和控制中断使能位的方式来设计中断的优先级。考虑系统工作时,当DSP请求单片机发送陀螺仪角度信号时产生的串口接收中断,直接影响DSP电子稳像后续程序的运行和视频显示的实时性,因此串口接收中断应置于最优先的位置;其次,陀螺仪信号只在外部INT0触发时才是有效的,应置于第2优先级;最后,数码管显示主要用于单片机模块的自检和陀螺仪组的辅助测漂,因此可以将定时器中断置于中断优先级的最低级。
2.2.2 软件程序设计
陀螺仪信号采集模块的软件部分包括主程序和各中断响应程序。主程序中,单片机初始化后,进入while死循环。F_INT0代表外部INT0中断的标志位,初始值为零。只有当单片机采集到新一帧陀螺仪信号后,F_INT0置位,单片机才会对陀螺仪信号进行相关处理,避免了单片机的重复工作,如图4(a)所示。
数码管显示采用动态显示驱动的方式,通过分时轮流控制各个数码管的使能端,使各个数码管轮流受控显示。由于人的视觉暂留现象及发光二极管的余辉效应,尽管实际上各位数码管并非同时点亮,但只要扫描的速度足够快,给人的印象就是一组稳定的显示数据,不会有闪烁感,动态显示能够节省大量的I/O端口,而且功耗更低。定时器中断数码管动态显示的程序流程如图4(b)所示。
当单片机响应INT0中断时,开始对陀螺仪信号进行采集。因为数据低位与数码管显示复用,首先需要将PORTA改变为输入方式,然后通过LS373使能控制,分别锁存陀螺仪水平向和垂直向的信号,并通过I/O采集。信号采集程序流程如图4(c)所示。
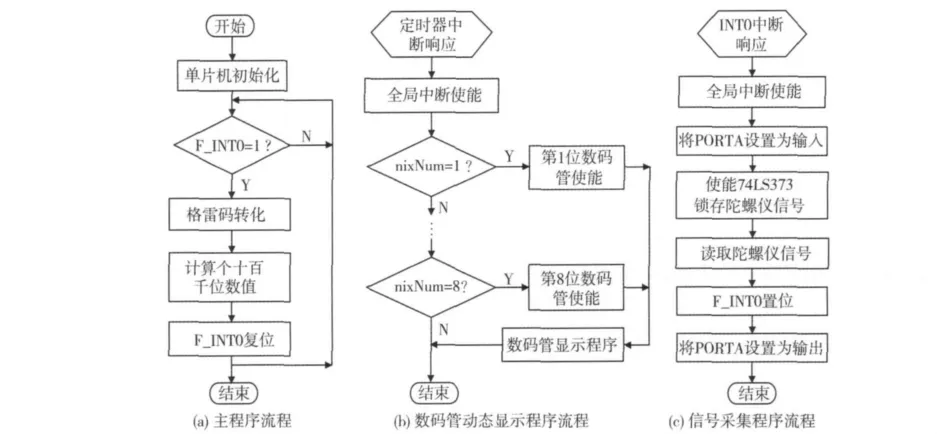
图4 信号采集模块主要程序流程
3 DSP电子稳像模块设计
本系统的核心部分——DSP电子稳像模块,选用了基于TMS320DM643的视频处理开发板。DM643在结构上延续了C64x的内核,采用了增强型超长指令字结构,芯片内部集成了8个独立的功能单元和64个32位的通用寄存器,在一个周期内可以完成4个16位的乘累加运算或者8个8位的乘累加运算,非常适合数字图像和视频处理。
3.1 电子稳像算法的基本原理
电子稳像 (Electronic Image Stabilization)是指利用数字图像处理的方法和图像运动变化信息,对视频中的图像按照一定模型进行反向补偿,消除因摄像机的随机运动而造成的图像抖动,获得视觉上稳定的视频图像序列[3-5]。电子稳像系统主要是由图像预处理、运动矢量估计、运动滤波和抖动补偿4部分组成[6],如图5 所示。

图5 电子稳像系统结构
电子稳像获取图像序列运动矢量的方法主要有2种:一种是利用运动估计算法直接从图像中提取运动矢量;另一种是利用高精度陀螺作为传感器来检测载体(瞄准镜)的运动信息[7]。第1种方法结构简单,价格低,但运动矢量估计需要占用较长的时间,当图像运动变化幅度较大或视场中存在运动目标等复杂情况时,会严重影响电子稳像的实时性和准确性;第2种方法成本较高,但实时性强且不受观察场景的影响。“下反”稳像炮长瞄准镜中安装了高精度的两自由度陀螺仪,可以准确测量瞄准镜在水平和垂直方向的姿态角变化,因此可以研究将其用于图像抖动的反向补偿,从而实现稳定图像的目的。
3.2 图形运动模型与比例因子标定
在对炮长微光瞄准镜中的图像进行稳像补偿之前,首先需要分析瞄准镜运动和图像运动的对应关系,进而确定合适的图像变换模型以及陀螺仪角度信号与图像运动矢量的比例因子。在三维计算机图形学的研究中,为了简化问题的处理同时又满足应用的需要,常用针孔相机模型来代替实际的摄像机[8]。针孔相机的成像几何关系称为透视投影(Perspective Projection)。透视投影使用一种基于几何光学原理的理想小孔成像原理来描述二维图像的形成,水平向的简化图如图6所示。

图6 简化的摄像机成像模型
图6中:OXYZ表示摄像机自身坐标系,oxy表示摄像机成像面的平面坐标系,摄像机视轴指向Z轴方向。当摄像机绕X轴转动一个角度θx,自然界中物体的像点在像平面y轴上的坐标变化可以近似为

同理可知,当摄像机绕X轴和Y轴转动时,图像的运动模型可近似为平移变换(Translation Transformation)模型:

式中:(x',y')、(x,y)为空间中某点在像平面坐标系中前后时刻的坐标;k为角度值与像素值的比例因子,等于单位距离像素个数与焦距的乘积,可以结合图像运动估计值与陀螺仪信号值,采用最小二乘法拟合求得。平移变换模型中,图像在水平面上发生整体平移,具有全局统一性,且图像特性(角度、对称性、内部结构)无任何改变,是一种刚性变换。
3.3 DSP电子稳像软件实现
在DSP电子稳像模块实现中,视频采集模块获取的PAL制视频流经视频线传递给SAA7115解码器,送至 DSP视频口 VP0,将其再解码得到 YUV(4∶2∶2)格式的图像,进入片内 FIFO 缓存,并通过EDMA传送至SDRAM中,然后通过中断通知DSP访问SDRAM中的图像数据并进行相应的稳像算法处理。DSP电子稳像程序流程如图7所示。

图7 DSP电子稳像程序流程
4 稳像实验与分析
为检验稳像系统的性能,笔者进行了陀螺仪信号采集和微光夜视瞄准镜的稳像实验。在瞄准镜静止状态下,陀螺仪信号采集模块中的数码管显示的水平向和垂直向数据稳定在原始零位;在动态条件下,数据随着瞄准镜的运动实时变化:这说明陀螺仪信号采集模块能准确采集和显示陀螺仪信号。
利用稳像模块的视频采集模块采集微光瞄准镜中的图像,同时利用计算机和视频采集卡采集DSP电子稳像处理前后的图像,并进行对比,结果如图8所示。图中水平和垂直方向的2条白线位于像平面的同一位置。可以看出:在稳像前,图像中的圆形标志盘和三角分划在垂直方向和水平方向都发生了移动,三角分划相对于圆形标志盘位置不变,是“稳线不稳场”的场景;DSP电子稳像后,三角分划和圆形标志盘的相对位置仍然不变,但两者在图像序列中的水平和垂直向的位置基本没有变化,说明经过稳像系统电子稳像后,炮长微光瞄准镜中的图像得到了有效的稳定,更加有利于炮长对目标进行观察和瞄准。

图8 炮长微光瞄准镜图像的稳像实验
5 结论
针对“下反”式炮长微光瞄准镜图像抖动的问题,笔者设计了独立的稳像系统。该系统集陀螺仪信号采集、视频采集显示和DSP图像处理于一体,实现了对微光瞄准镜中图像的有效稳定,提高了炮长的观察和瞄准的能力。另一方面,陀螺仪组件测量信号只包括水平和垂直2个方向的角姿态变化信息,所以稳像系统无法对位移振动和绕视轴旋转引起的图像抖动进行补偿。因此在基于陀螺仪的电子稳像技术的基础上,用更高精度的电子稳像算法对图像进行二次稳定,可以进一步提高微光瞄准镜稳像的精度。
[1] 周启煌,常天庆,邱晓波.战车火控系统与指控系统[M].北京:国防工业出版社,2003:1-22.
[2] 朱竞夫,赵碧君,王钦钊.现代坦克火控系统[M].北京:国防工业出版社,2003:63-88.
[3] 郑晓峰,陈越庭,徐之海,等.一种补偿平移与旋转运动的快速电子稳像算法[J].光子学报,2008,37(9):1890-1894.
[4] 纪红霞,蒋晓瑜,李树军.车载电子稳像算法研究[J].装甲兵工程学院学报,2005,19(3):38-41.
[5] 王志民,徐晓刚.电子稳像技术综述[J].中国图象图形学报,2010,15(3):470-480.
[6] Hsu S C,Liang S F,Fan K W,et al.A Robust In-car Digital Image Stabilization Technique[J].IEEE Transaction on Systems,Man and Cybemetics,2007,37(2):234-247.
[7] 杜登崇.面向运动场景的电子稳像算法研究[D].北京:装甲兵工程学院,2009.
[8] 章毓晋.图像工程(下册):图像理解与计算机视觉[M].2版.北京:清华大学出版社,2007:44-54.
