变体无人机动力学模型及切换控制研究
2012-10-04董朝阳侯砚泽
苏 铁,董朝阳,侯砚泽
(北京航空航天大学a.航空科学与工程学院;b.自动化科学与电气工程学院,北京 100191)
变体无人机能够通过在飞行过程中的结构变形来拓宽其飞行包线,同时在飞行包线内的不同区域都能拥有较高的气动效率[1]。然而,飞行过程中的结构变形会引起重心位置、转动惯量、机翼展长、机翼面积等构型参数的改变,还会引起气动力与力矩,惯性力与力矩的非线性变化,导致模型具有较强的时变性和不确定性。变体无人机的动力学建模及控制系统设计存在诸多问题和难点,国内外学者对其进行了多种建模与控制方法的研究。文献[2]通过多体假设及柔体假设对变体飞行器进行了动力学建模,文献[3]在此基础上基于线性变参(LPV)系统理论提出了一种变体飞行器的稳定性分析方法。文献[4]针对Z型翼变体无人机,对机翼折叠过程中的气动特性进行了数值模拟。文献[5]提出一种多环的控制器设计方法,内环提供飞机的定常稳定性,外环采用LPV设计方法保证变体飞机在时变气动特性下的鲁棒稳定性。本文拟采用切换控制方法对变体无人机控制系统设计进行尝试。切换系统是由一组连续微分方程描述的子系统集合以及各子系统之间的切换规则组成的混合动力学系统,能对参数大范围变化的系统进行描述和分析[6],在航空航天领域有着广泛的应用,如垂直、短距起降飞行器的切换控制[7],飞机大迎角机动跟踪控制[8],高超声速飞行器的自适应控制[9-10]等。
飞行器的纵向稳定性与纵向短周期运动直接相关,因此在飞行器控制领域往往使用短周期特性来分析纵向稳定性。在本文中,针对能进行机翼结构变形的变体无人机Fire-Bee,在质点系假设条件下得出其纵向短周期动力学模型;将其视作一类线性切换系统,选择若干设计点,针对各点设计单点控制器;确定控制器切换方案,建立能够在不同的控制器之间进行切换的切换控制系统;通过构造公共Lyapunov函数,利用线性矩阵不等式(LMI)证明系统的一致有界性。最后,基于非线性运动方程,对控制方案进行仿真验证。
1 动力学建模
变体无人机Fire-Bee在飞行过程中能够在“巡航”和“高速”两种形态间进行机翼结构变形,如图1所示。
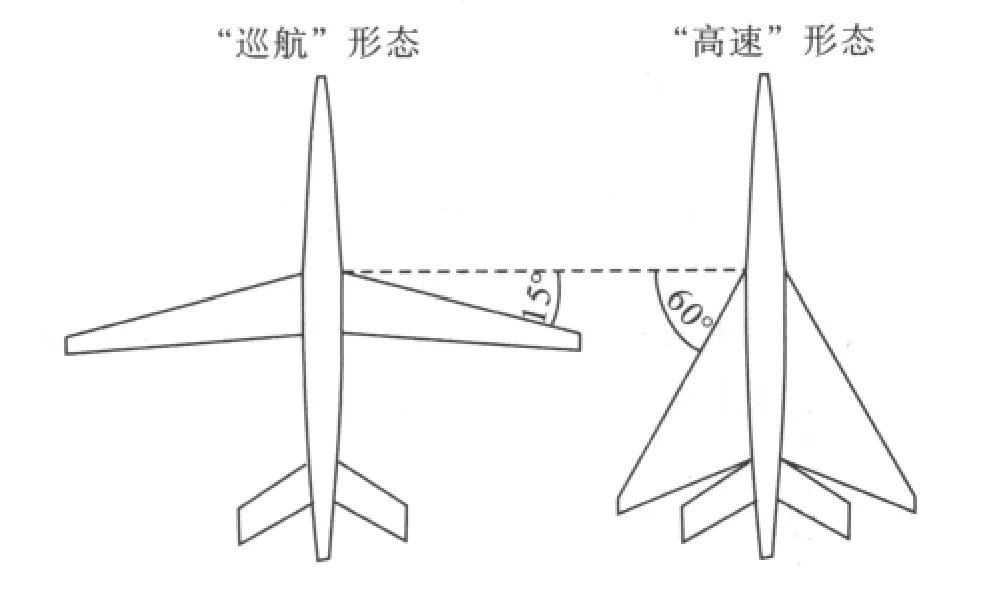
图1 变体无人机Fire-Bee平面图
变体无人机Fire-Bee机翼后掠角变化范围为15°~60°,机翼面积、平均气动弦长、展长随之连续变化,一个后掠角对应于一种固定构型,变体无人机的气动数据根据不同的构型给出,也就是说,它们都是后掠角χ的函数。在进行纵向短周期动力学建模时,有如下简化条件:
(1)准定常假设:忽略由飞行中的变形动态过程引起的非定常气动力与力矩,假设变体飞行中的气动力与力矩等同于当前瞬态结构下飞行的气动力与力矩;
(2)质点系假设:在变体无人机相对于机体轴进行结构变形时,将各变形结构的运动视为质点的运动,只考虑由其质心运动引起惯性力与力矩的非线性变化,忽略其转动及其他变形形式的影响;
(3)在纵向运动方程中,不考虑发动机推力引起的俯仰力矩,并假定发动机安装角为零;
(4)变体无人机Fire-Bee上有质量为ma的配重,位于机体纵轴(x轴)上,坐标为xa,它能在无人机变后掠过程中随着机翼(质量为mw)的重心位置(x轴坐标为xw)移动而移动,从而始终保持全机重心位置不变。
在准定常假设和质点系假设条件下,变体无人机多体动力学方程为:
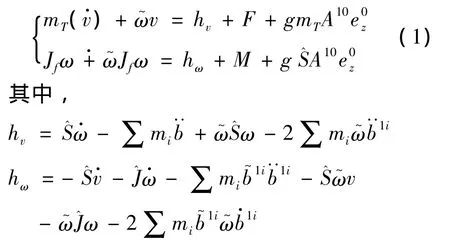
式中,
mT为全机质量,
v= [VTcosαcosβ VTsinβ VTsinαcosβ]T为飞行速度矢量,
ω=[P Q R]T为相对于地面坐标系的转动角速度矢量,
F为气动力矢量,
M为气动力矩矢量,
A10为地面坐标系到体轴系的转换矩阵,
Jf为机身(无人机非变形部分)转动惯量,
b1i为动质点在体轴系中的位置矢量,
将式(1)中力的方程与力矩的方程展开为标量形式,并将力的方程投影到风轴坐标系Fw上,得到基于假设条件3的纵向短周期运动方程:
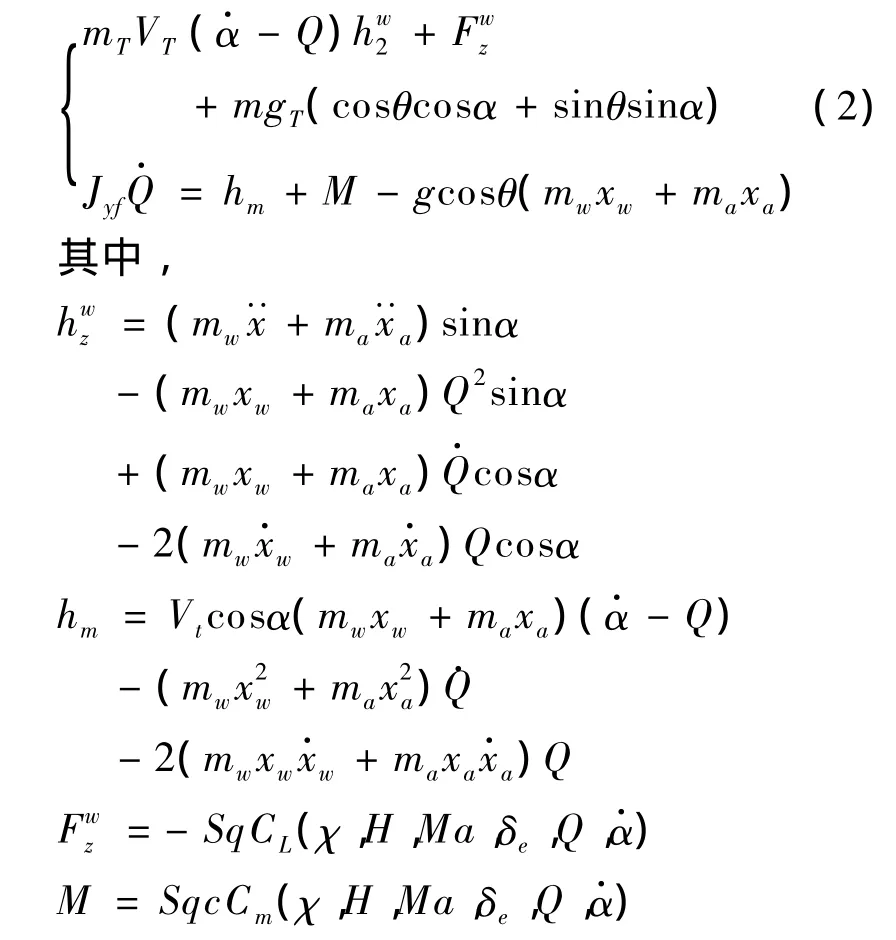
式中,
Jxf为机身俯仰转动惯量,
S为机翼面积,
q为当前动压,
c为平均气动弦长,
δe为升降舵偏角。
再由条件4可知mwxw+maxa=0,将式(2)简化为:
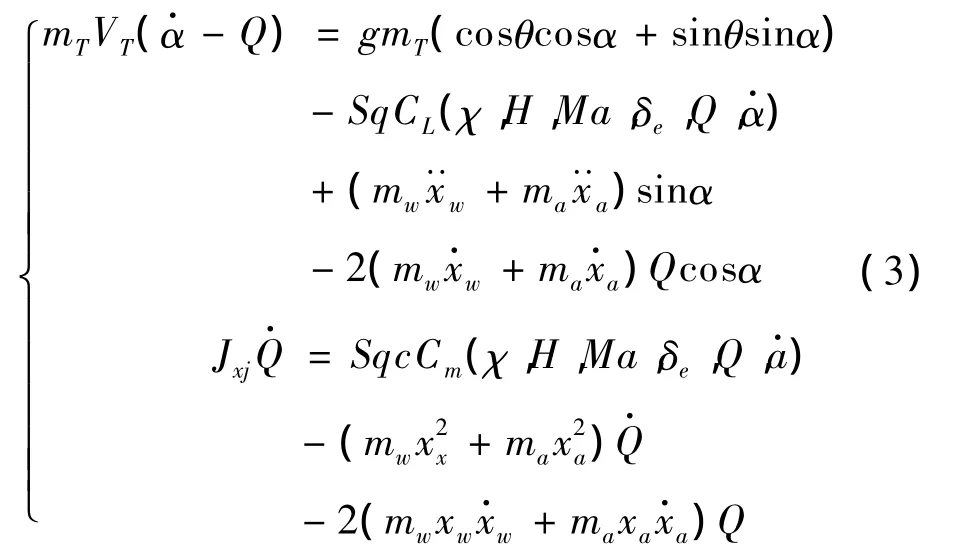
至此便完成了变体无人机Fire-Bee的纵向短周期非线性动力学建模,在采用切换系统理论进行控制系统设计时,还需要对其进行线性化。在选定的后掠角下对式(3)进行线性化时,xw、xa为常数,并且力、力矩系数也具有如下形式:
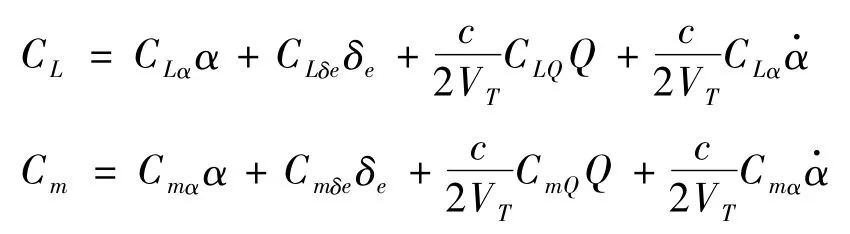
其中各气动力、力矩导数均为后掠角χ的函数。于是便可得到与固定翼飞机相同形式的小扰动状态空间模型:

状态变量 x=(α,Q),控制变量 u 取 δe。Asp、Bsp由变体无人机在某高度、马赫数下的气动参数、构型参数计算得出,它们随着无人机的变形而改变,可把Asp、Bsp看作是后掠角的函数。
2 切换控制研究
2.1 切换系统模型及控制器设计
在式(4)中,系统矩阵Asp、控制矩阵Bsp随后掠角χ变化,将其视为一类线性切换系统:

式中,下标 σ(t,χ):[0,+∞)⊗ X→ Ω ={1,2…,N}为分段右连续切换信号,后掠角χ为独立于切换系统模型的决策变量 X=[15°,60°],Ω 为模型下标集;{(Asp,iBsp,i),i∈Ω}为切换系统矩阵集,满足(Asp,iBsp,i)可控且 Bsp,i列满秩。
本文中的切换系统决策变量χ在15°~60°之间变化,每5°划分一个区间,获得10个分别对应于后掠角15°、20°、…60°的子系统;针对每个子系统,在未加入舵面作动环节的情况下,采用极点配置方法,选择配置极点为[-2+2i,-2-2i],得到状态反馈增益向量;加入舵面作动环节Ga=20.2/(s+20.2),将由极点配置得到的状态反馈量直接反馈到升降舵偏角指令端,验证表明带舵面作动环节的闭环系统主导极点与配置点[-2+2i,-2-2i]临近,单点控制器设计结果满意;最后,在设计得到的各子系统控制器上加入切换律(根据后掠角χ),得到变体无人机的纵向短周期控制系统,控制结构如图2所示。
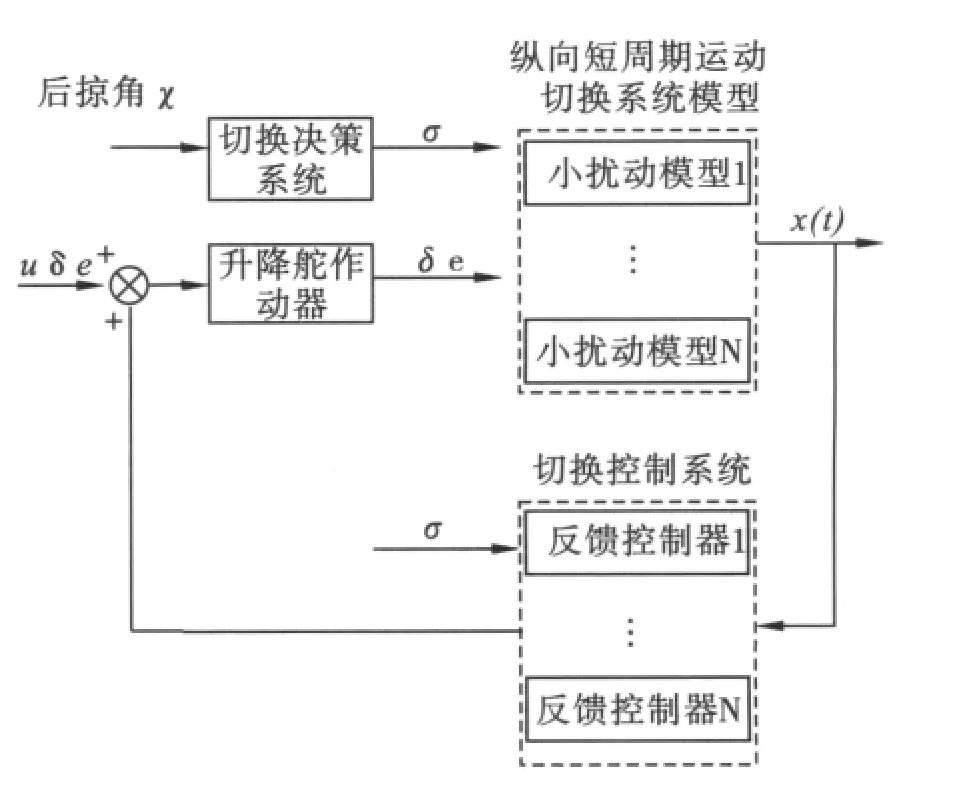
图2 切换控制系统结构图
2.2 闭环切换系统稳定性
由文献[6]可知,闭环切换系统的稳定性可通过如下引理来进行验证:
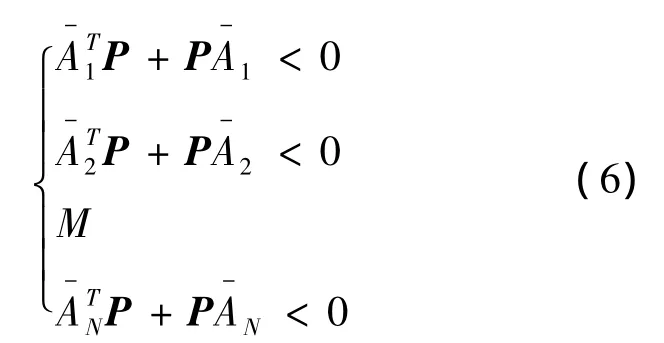
则闭环系统在任意切换律下一致有界。
3 仿真验证
本文以变体无人机Fire-Bee为例,设计其纵向短周期切换控制系统,并对其闭环动态特性进行仿真验证。仿真在高度9 150 m,马赫数0.5处进行,采用文献[2]给出的气动数据。表1列出了无人机在“巡航”、“高速”两种形态下的构型参数,其他后掠角度下的参数通过一定方式拟合得到。
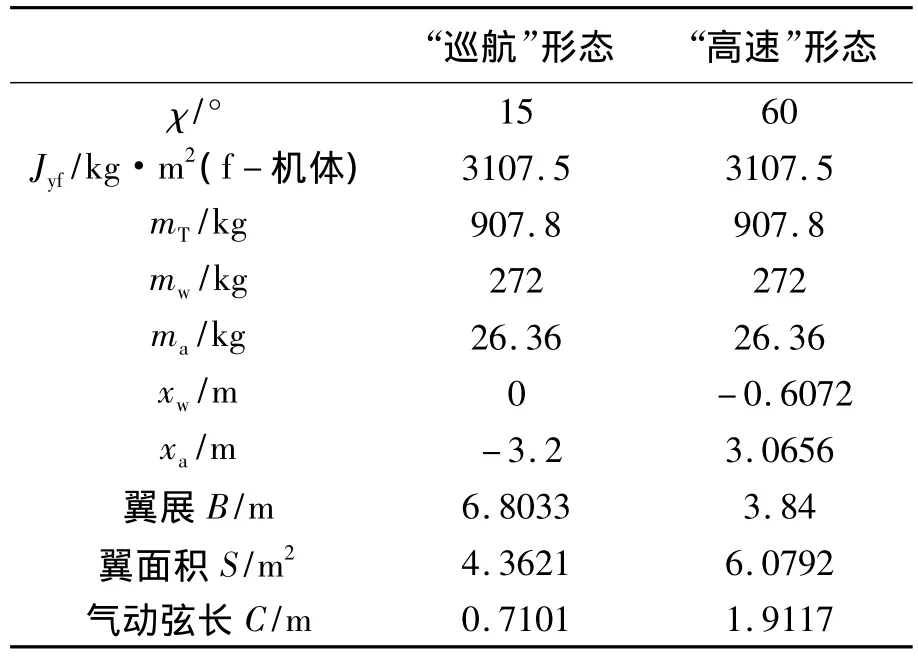
表1 变体无人机Fire-Bee构型参数
采用2.1节中介绍的方法,划分后掠角区间得到 10 个子系统矩阵集合(Asp,σ,Bsp,σ),针对各子系统采用极点配置方法得到10个反馈增益向量集合 ksp,σ,为简单起见将它们表示为 A15、B15、k15,A20、B20、k20,….,A60、B60、k60,分别对应于后掠角15°、20°,….,60°。加入舵面作动环节后,验证得到所有闭环子系统共轭极点均在配置极点(-2,±2i)的R=0.255领域内,单点控制器的设计结果满意。在切换控制系统中,设计切换律为在各相邻子系统所对应的后掠角区间的中点处进行控制器切换,例如在(A15,B15)、(A20,B20)所对应的后掠角区间[15°,20°]上,切换点为 17.5°,在[15°,17.5°]区间上使用反馈增益向量 k15,在[17.5°,20°]区间上使用反馈增益向量 k20。
在采用2.2节中的定理进行闭环系统稳定性分析时,为了提高分析精度,以1°为间隔在χ∈[15°,60°]上划分得到 46 个闭环切换子系统,系统矩阵分别为 A15x、A16x、A17x、…、A60x,Ajx表示χ=j°时的开环子系统加上升降舵作动器和最邻近设计点处的控制器后的闭环系统矩阵,例如在χ=17°处,开环系统矩阵A17和控制矩阵B17在加入作动器环节和反馈增益向量k15后得到闭环系统矩阵A17x。通过MATLAB软件LMI工具箱计算得出令 A15x、A16x、A17x、…、A60x满足切换系统稳定条件(6)的正定解矩阵P存在,且
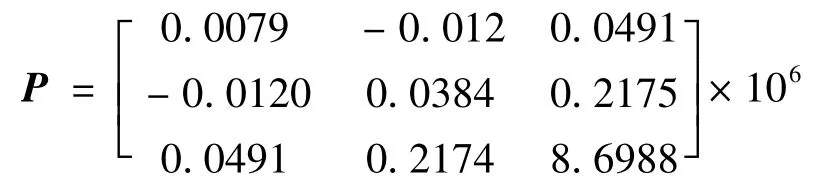
故由定理1可知闭环切换系统可在反馈控制律及切换信号作用下保持稳定。
选择后掠角38°作为代表,仿真验证所设计的切换控制系统在设计点之外的工作点处的飞行控制效果。图3为闭环系统在后掠角38°静态构型下的迎角扰动响应,包括线性模型和非线性模型的仿真结果。仿真结果表明,线性模型对变体无人机的运动描述与非线性模型比较贴近,在给予5°的迎角扰动后,迎角在3 s内回到平衡点,俯仰角速度波动幅值不超过6°/s,舵偏角操纵量在1°以内,切换控制系统在此构型下控制效果良好。
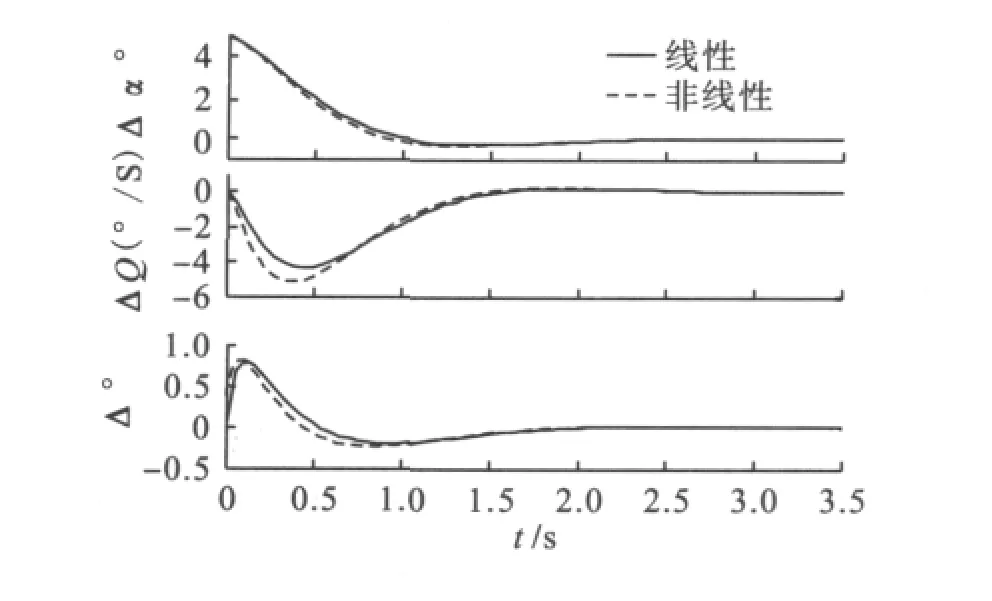
图3 后掠角38°构型下的迎角扰动响应
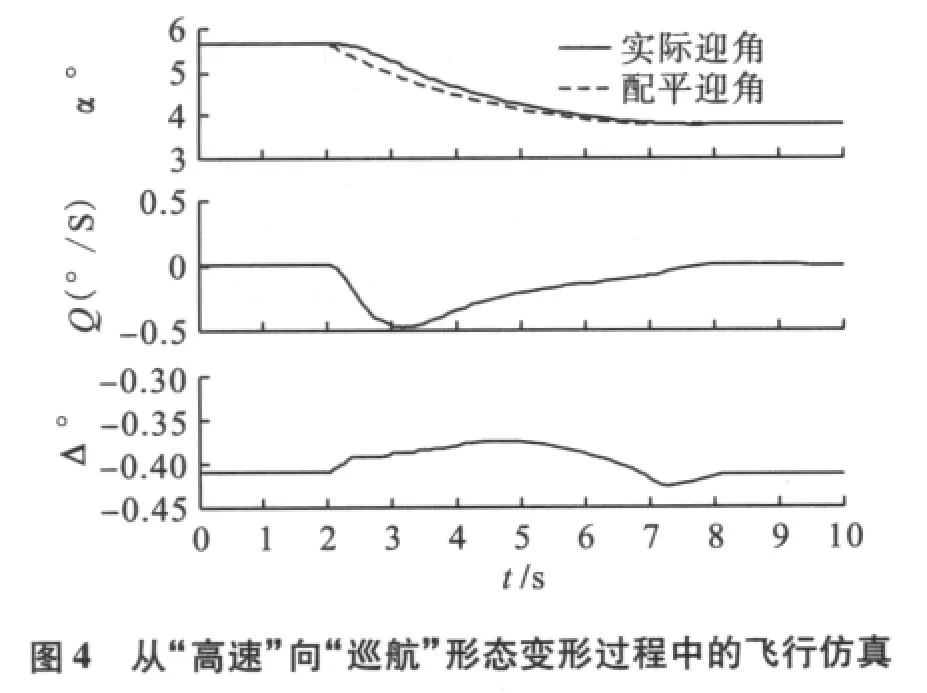
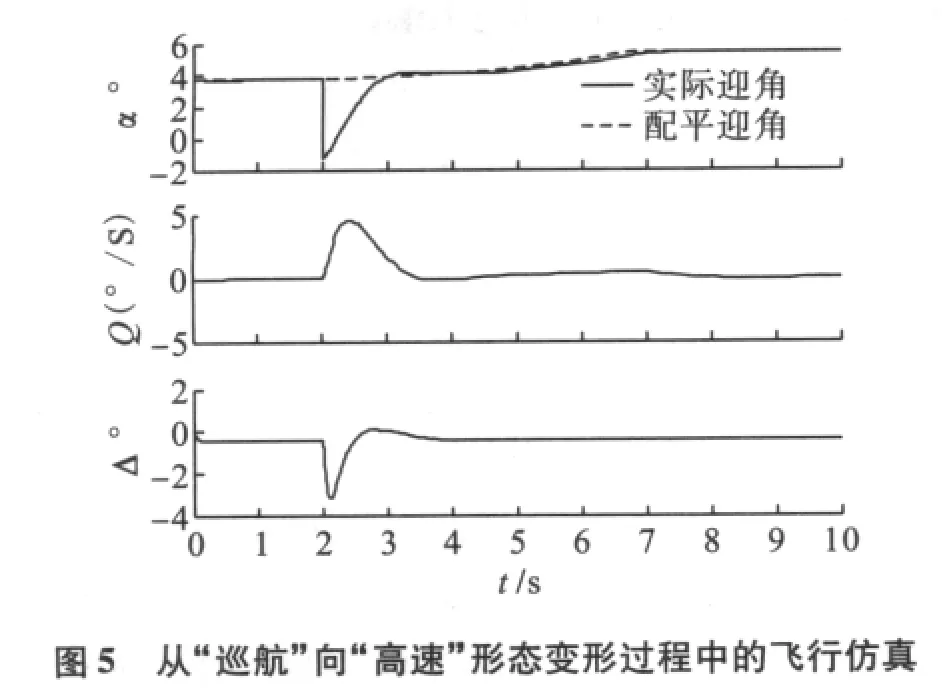
图4和图5显示了闭环系统在无人机进行变体飞行时的动态特性,在变体过程中,舵偏指令始终取为当前后掠角度下的平飞配平舵偏角。图4为Fire-Bee从“高速”形态向“巡航”形态进行结构变形时的飞行仿真结果,无人机从2秒开始变形,后掠角在5秒内从60°匀速变化到15°,结果显示其在变体过程中对配平迎角跟踪良好。图5为Fire-Bee在有迎角扰动的情况下,从“巡航”形态向“高速”形态进行结构变形时的飞行仿真结果,无人机从2秒开始变形,后掠角在5秒内从15°匀速变化到60°,在开始变形的同时给予其-5°的迎角扰动,结果显示其在变体飞行过程中具有较强的抗扰动能力。
4 结论
本文针对变体无人机Fire-Bee,在质点系假设条件下建立其动力学模型,并根据切换系统理论对其进行纵向切换控制系统设计。通过文中给出的闭环系统稳定性条件验证表明,设计得到的控制系统能够保证系统稳定性。仿真结果表明:在各固定构型下,闭环系统具有良好的动态特性;切换控制系统能够保证变体无人机在飞行过程中进行平稳的变形,并且在变形过程中具有较强的抗扰动能力。
[1] Rodriguez A R.Morphing aircraft technology survey[R].AIAA -2007 -1258,2007.
[2]Seigler T M.Dynamics and control of morphing aircraft[D].Blacksburg:Virginia Polytechnic Institute and State University,2005.
[3]Seigler T M.Analysis of transition stability for morphing aicraft[J].Journal of Guidance,Control and Dynamics,2009,32(6):1947 -1953.
[4]乐挺,王立新,艾俊强.Z型翼变体飞机的纵向多体动力学特性[J].航空学报,2010,31(4):679 -686.
[5]Baldelli D H,Lee D H.Modeling and control of an aeroelastic morphing vehicle[J].Journal of Guidance,Control and Dynaics,2008,31(6):1687 -1699.
[6] Hou Yanze,Dong Chaoyang,Wang Qing.Stability analysis of switched linear systems with locally overlapped switching law[J].Journal of Guidance,Control and Dynamics,2010,33(2):396 -403.
[7] Turner M C,Aouf N,Bates D G,et al.Switched control of a vertical/short take-off land aircraft:an application of linear quadratic bumpless transfer[C].Proceedings of the Institution of Mechanical Engineers,Part I:Journal of Systems and Control Engineering,2006,220(3):157 -170.
[8] Lu B,Wu F,Kim S W.Switching LPV control of an F-16 aircraft via controller state reset[J].IEEE Transactions on Control System Technology,2006,14(2):167-277.
[9] Hou Yanze,Wang Qing,Dong Chaoyang.Gain scheduled control:switched polytopic system approach[J].Journal of Guidance,Control and Dynamics,2011,34(2):623-628.
[10]侯砚泽,董朝阳,王青.不确定切换系统的鲁棒自适应控制方案[J].北京航空航天大学学报,2009,35(4):444-448.
