直驱永磁同步风力发电系统的研究
2012-09-29张蔚,王岳,杨奕
张 蔚,王 岳,杨 奕
ZHANG Wei1,2, WANG Yue3, YANG Yi2
(1.南通大学 杏林学院,南通 226019;2.南通大学 电气工程学院,南通 226019;3.江苏通达动力科技股份有限公司,南通 226019)
0 引言
在直驱永磁同步风力发电系统中,永磁同步发电机系统不需要励磁装置,具有重量轻、效率高、功率因数高和可靠性好等优点。转子上取消了励磁绕组,磁极结构简单,可以做成多极电机,同步转速降低使风轮机和永磁发电机可直接耦合,省去了风力发电系统中的齿轮增速箱,减小了发电机的维护工作并降低了噪声,使直驱永磁风力发电机系统从众多变速恒频风力发电系统中脱颖而出,具有很好的发展前景。由于永磁同步发电机输出的交流电由不可控整流后,经电容滤波,再经逆变器将能量送给电网。当风速较低时,直流电压会很低, 过低的直流电压将引起电压源逆变器无法完成有源逆变过程,进而无法将功率馈入电网。为了最大限度地利用风能,使直驱永磁发电机系统工作在一个较宽风速范围内,得引入DC-DC Boost升压斩波电路。交错并联Boost电路能够在开关频率较低的情况下获得较小的输入电流纹波与输出电压纹波,同时还能够降低开关损耗,成倍增加输出功率的等级减少单个电感的容量,在具有良好校正效果的前提下,可大幅度减少整个功率电路的成本。因此,交错并联Boost非常适合用于大电流、高功率的应用领域,较大功率开关电源及直驱型风力发电系统中的直流升压部分[1~4]。本文采用三相交错并联Boost电路对直驱永磁同步风力发电系统进行最大功率跟踪控制,并基于TMS320F2812搭建了实验室硬件平台,对风力发电系统进行相关实验验证。
1 风力机特性
风力机把风能转化为机械能是一个复杂的空气动力学过程,很难精确描述它。为了研究需要,人们设计了一种简单的模型来描述风力机的特性,它反映了风速与风力机从风中吸收功率的关系,如公式(1)—(4)所示。风力机的功率系数CP反映了风力机吸收利用风能的效率,它随风速、风力机转速以及风力机叶片参数如功角和桨距角等而变化。当风速变化时,可通过调节式(2)中的比值就可以得到最佳叶尖速比,即可得到Cpmax,从而达到最大风能捕获[3]。
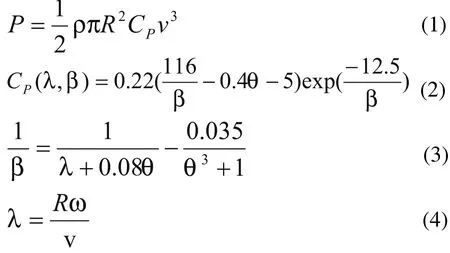
式中, P ——通过风轮扫掠面积风的功率,单位为W;
ρ——空气密度,单位为kg/m3;
R ——风轮半径,单位为 m;
v ——实际风速,单位为m/s;
CP——风力机的功率系数;
ω——风力机旋转的角速度;
λ——叶尖速比。
风力机的功率可以由风力机的转矩与旋转角速度的乘积来表示,其关系为:
P=Tω
根据式(1)可以推导出风力机输出转矩与风速和转速之间的关系

式中,T 为转矩,单位为N m;
CT=CP/λ为反映转矩大小的系数。根据式(1)和式(5)可以知道,风力机的最大功率和最佳转矩分别与转速的三次方和二次方成正比,风力机特性曲线如图1和图2所示。

图1 风力机功率—转速曲线
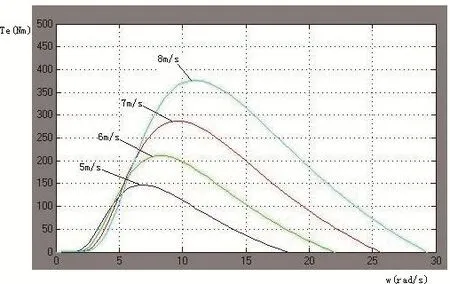
图2 风力机转速—转矩曲线
2 直驱永磁同步风力发电系统
2.1 系统组成
该系统主要包括风力机、永磁同步发电机、DC/DC变换电路、DC/AC变换电路以及负载等组成。系统电路图如图3所示,其中DC/DC变换电路选择三相交错BOOST电路,DC/AC变换电路选择三相电压型逆变电路。通过对DC/DC、DC/AC变换器的控制,将永磁同步发电机发出的变频变幅电压转化为恒频恒幅电压输出。

图3 直驱永磁同步风力发电系统电路结构
2.2 最大功率跟踪的原理
最大功率追踪算法是实现风能利用率最大化的优化算法,即在一定的风速条件下,通过对等效负载的调整,实现风力机转速的调整变化,使得风力机运行在最佳叶尖速比曲线上,从而能够及时地捕获到随机波动的最大风能,使风力发电机输出功率最大,提高风能的利用率,实现系统的优化运行。

图4 风力机转速—功率曲线
图4为风力机输出功率与转速特性曲线,由图4可知,在某一固定转速下,风速越大风力机输出功率越大;风速固定时,风力机在特定转速下才可以输出最大功率,转速过小或过大时,风力机输出功率都会变小。图4中实线为不同风速下风力机输出最大功率的连线,也称为最佳功率负载线。要在风速不断变化时获取最大风能,风力机必须始终跟踪其最大功率点,使风力机在最佳叶尖速比下运行,输出最大机械功率。
2.3 MPPT控制策略
传统爬山算法,在跟踪控制过程中,扰动步长过大时,不可避免地出现在最大功率点附近振荡的现象,导致跟踪的最大功率点与实际值相差很大,降低了风能转换效率;扰动步长过小时,则会降低跟踪的快速性。因此需要权衡准确性与响应速度,确定一种既可以减少最大功率点附近振荡,又可实现准确和快速地跟踪最大功率点的控制方法。本文采用改进的变步长爬山算法来实现最大功率跟踪控制[4],其控制流程图如图5所示。
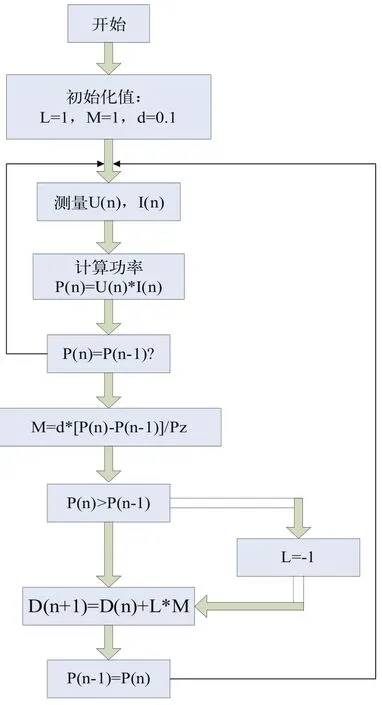
图5 改进的爬山算法流程图
图5中U(n)、I(n)、P(n)为测量和计算的永磁同步风力发电机的输出电压、电流和功率值,而P(n-1)为上次计算的发电机功率值,PZ为功率增量的基准值,M为步长,L为符号控制变量,d为初始占空比D(n)和D(n-1)分别为第(n)、(n-1)次的占空比。
2.4 逆变器控制策略
直接电流控制是一种电流跟踪控制方式,通常采用电压外环和电流内环的双环控制模式。这类电流型控制技术是检测电感电流或功率开关电流,并将它作为电流内环的反馈信号,然后将它与电压外环的输出信号(电流给定) 经比较器比较后去控制功率开关的占空比,使功率开关的峰值或谷值电流直接跟随电压反馈回路中误差放大器输出信号的变化。这种控制方式具有电流波形好、动态响应速度快、稳定性好和调节性能好等优点[5]。本文采用滞环电流跟踪控制,其控制策略的系统原理图如图6所示。由相位检测环节得到的同步信号与并网电流幅值给定一起送正弦波发生器,生成与电网电压同频同相的参考电流信号 ,再经滞环比较器对并网电流反馈信号 与 偏差进行调制得到开关管控制信号。

图6 并网逆变器系统控制原理图
3 系统仿真与实验研究
3.1 基于三相交错BOOST电路MPPT仿真研究
本文利用仿真软件Matlab/Simulink对直驱永磁同步风力发电MPPT控制系统进行了建模与仿真研究。模型如图7所示。仿真模型由风力机系统、发电机模型、三相交错BOOST电路、MPPT控制算法模块组成,其中风力机仿真参数为风力机额定功率5kW,叶片半径为3.5m,最大风能利用系数为0.4,桨距角为0度,发电机额定功率为5kW,内阻为0.5Ω,d轴电感与q轴电感均为3mH,磁链大小为0.5Wb,极对数为7,直流侧电感为2.3mH,滤波电容为2mF,负载为80Ω,负载滤波电容为470 uF。

图7 直驱永磁风电系统仿真模型
风速的给定阶跃信号在第2s从5m/s突变到8m/s,对系统进行仿真,仿真结果如图8和图9所示。从图8占空比的波形图中可知占空比在风速为5m/s时能够保持在0.34附近,而当风速在8m/s时能够保持在在0.53附近,波动很小,系统较为稳定。从图9可以看出,输出的功率波形平稳,而且跟踪速度很快,在0.8s以内就能够跟踪到最大输出功率。
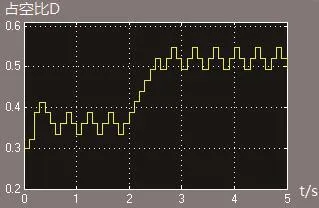
图8 占空比波形图

图9 风力机输出功率
3.2 实验结果
实验系统如图3所示,在实验室中使用一台6kW他励直流电动机来拖动5kW的永磁同步发电机,通过直流电动机来模拟风力机,搭建了基于DSPTMS320C2812的实验室硬件平台,功率开关IGBT选择三菱公司生产的IPM模块型号为PM50RLA120。由于电网相电压有效值为220V,为了系统逆变能得到220V交流电, 逆变器输入电压应为380V左右,逆变器开关频率为20kHz,滤波电感为10mH。对该系统进行测试,实验结果如图10和图11所示。图10为直流侧电压波形,图11为a相电压与电流波形图。实验结果表明直流电压波形比较平稳,逆变器输出电流为稳定的正弦波,且与电网电压相位相同,实现了单位功率因数电能传送。
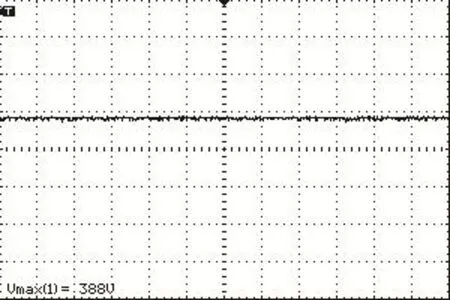
图10 直流侧电压波形

图11 逆变器输出波形图
4 结束语
本文采用改进的变步长最大功率跟踪算法改变占空比对三相交错Boost电路进行控制,采用滞环电流跟踪控制对逆变器进行控制,使直驱永磁同步风力发电系统获取最大功率,并实现近似单位功率因数并网运行。通过仿真与实验研究证明了其控制策略的正确性与可行性。
[1] 闫耀民,范瑜,汪至中.永磁同步电机风力发电系统的自动优[J].电工技术学报,2004,17(6):82-86.
[2] 吴迪,张建文.变速直驱永磁风力发电机控制系统的研究[J].大电机技术,2006,(6):51-55.
[3] 刘其辉,贺益康,赵仁德.基于直流电动机的风力机特性模拟[J].中国电机工程学报,2006,(4):134-139.
[4] 李扬.永磁直驱风力发电系统的模拟仿真及MPPT方法研究[D].河北:燕山大学,2010.
[5] 李友红,黄守道.风力发电系统中PWM并网逆变器的研究[J].电气应用,2006,(10):63-65.
