三站无源时差定位系统噪声干扰效果分析
2012-09-28杨军佳毕大平沈爱国
杨军佳,毕大平,2,陈 慧,2,沈爱国,2
(1.解放军电子工程学院,合肥230037;2.安徽省电子制约技术重点实验室,合肥230037)
1 引 言
时差定位系统以其良好的定位性能在侦察定位系统中受到越来越多的关注,有关该系统定位精度的研究已有大量的工作,文献[1-5]分别从不同的侧重点研究了影响时差定位系统定位精度的因素。但是关于该系统主动对抗的研究还比较少。噪声干扰是电子对抗领域最常用的一种干扰方式,本文在文献[1-3]中定位误差公式的基础之上,考虑了侦察站对信号到达时间的测量误差受噪声影响的因素,对时差定位系统中不同侦察站受到相同强度的噪声干扰以及同一侦察站受到不同强度噪声干扰后的干扰效果进行了研究。
2 噪声干扰原理及时差定位原理
2.1 噪声干扰原理
噪声对侦察系统的干扰原理是通过干扰设备向时差定位系统发射包含辐射源频率在内的大功率窄带噪声,以使定位系统中的各侦察站对辐射源信号到达时间的测量出现误差,进而导致侦察主站与副站之间的信号到达时间差出现误差,最终达到使时差定位系统对辐射源的定位出现偏差而不能对辐射源精确定位的目的。
假设各侦察站对信号到达时间的测量均采用固定门限法,干扰信号功率能够全部进入侦察接收机,辐射源辐射的信号s(t)以及侦察站接收到的信号x(t)模型为
式中,0≤t≤T,τ为信号到达时间,T为观测时间,n(t)为干扰设备发射的噪声。
由文献[4]可得,侦察站对信号到达时间测量的均方误差为

式中,tr为脉冲幅度前沿从10%到90%的上升时间,So/No为接收机输出的信噪比。
信号被侦察系统截获之后,首先经过接收机的线性部分(检波器之前的部分),其次经过接收机的非线性部分(检波器),最后再进行视频信号处理。
信号经过接收机线性部分的时候,线性部分的输入输出信噪比与噪声系数[5]的关系为
式中,F为接收机噪声系数,So为侦察接收机线性部分输出额定信号功率,No为侦察接收机线性部分输出额定噪声功率,Si为接收机线性部分输入额定信号功率,Ni为接收机线性部分内部噪声功率,k=1.38×10-23J/K为波尔兹曼常数,T为绝对温度,B为接收机带宽。
信号经过接收机非线性部分的时候,信号与噪声经过检波,该部分的输入输出信噪比满足
则由上可得,噪声干扰下侦察站对信号到达时间的测量均方误差为

式中,β为一与雷达信号脉冲前沿宽度有关的常系数,J为有源噪声功率,其余参数同上。
2.2 三站无源时差定位原理
时差定位是利用平面或者空间中的多个侦察站,测量出同一个信号到达各侦察站的时间差,由此确定辐射源在平面或空间中的位置[6]。假设辐射源位于平面的 E点,3个侦察站 A(xA,yA)(主站)、B(xB,yB)和 C(xC,yC)对辐射源测得的时间差分别为tAB、tAC。为了便于分析,本文只考虑该定位系统中侦察站对信号到达时间测量误差的影响,忽略站址误差等其他影响因素。这里作为近似计算,假定各侦察站对信号到达时间测量误差是正负对称的。平面上三站无源时差定位示意图可用图1表示。
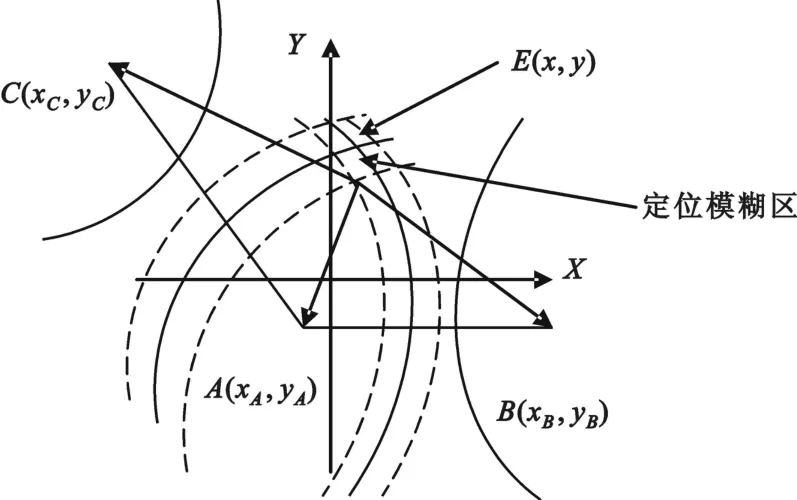
图1 平面三站无源时差定位示意图Fig.1 The diagrammatic sketch of 2D TDOA location
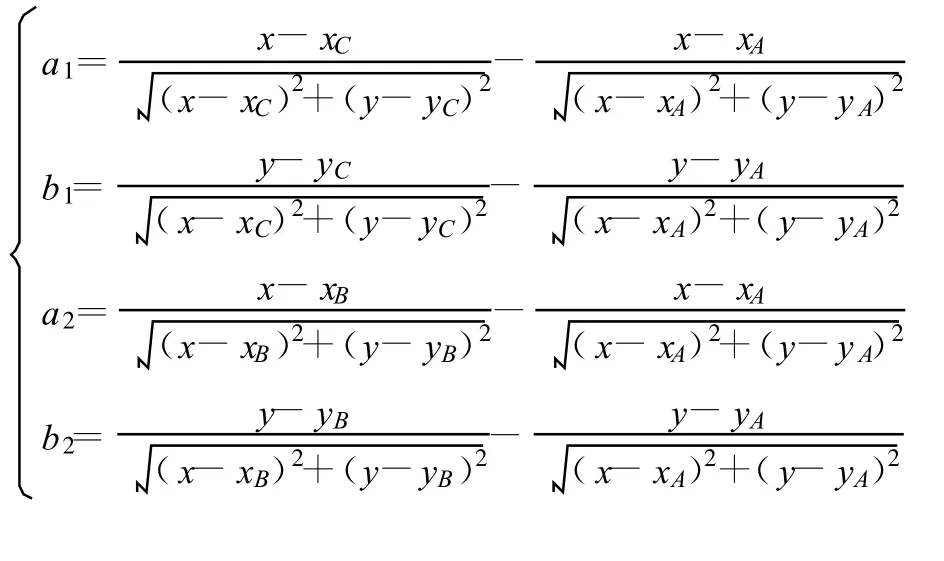
由文献[1-3]可得
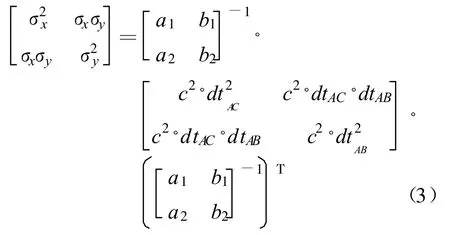
式中,σx和σy分别表示侦察系统在x轴和y轴上的定位误差,dtAC、dtAB分别表示辐射源信号到达侦察站A和C以及侦察站A和B的时间差误差,c表示电磁波在真空中的传播速度,且
3 噪声干扰下时差定位系统定位误差及干扰效果评估因子
3.1 噪声干扰下时差定位系统定位误差
由时差定位原理可得tAC、tAB分别是辐射源信号到达侦察站A和C以及侦察站A和B的时间差,即
式中,tA、tB、tC分别表示侦察站A、B 、C测得的辐射源信号到达时间。
对式(4)进行微分,可得
一般情况下,侦察站对信号到达时间的测量误差δt可以用信号到达时间测量误差均方根σt表示,即
式中,δtA、δtB、δtC分别表示侦察站A 、B 、C 对信号到达时间测量误差,σtA、σtB、σtC分别表示侦察站A、B 、C对信号到达时间测量误差的均方根。
把式(6)代入式(5)可得

按照实际应用中的习惯,我们取式(7)中的最大值作为本文研究的侦察站间到达时间差误差,即
式中,各参数同上。
把式(2)、式(8)代入式(3)即可得噪声干扰下侦察系统在x轴和y轴上的定位误差。
3.2 时差定位系统噪声干扰效果评估因子
二维分布情况下,定位误差可以用圆概率误差CEP来表示,而实际应用中,通常采用相对定位误差[7]rCEP来表示定位的优劣,相对定位误差定义为

式中,R表示目标与主站之间的距离,其余参数同上。
为了便于研究噪声干扰对三站无源时差定位系统相对定位误差产生的干扰效果,定义干扰效果评估因子 Δ rCEP为

式中,rCEP、r′CEP分别表示三站无源时差定位系统受噪声干扰前后的相对定位误差。
从式(10)可以看出,干扰效果评估因子越大,噪声对三站无源时差定位系统的干扰效果越好。
4 噪声干扰不同情况下三站无源时差定位系统干扰效果分析
由上述分析可知,三站无源时差定位系统没有受到噪声干扰时,各侦察站对信号到达时间测量误差为
式中,σtA、σtB、σtC分别为侦察站A 、B 、C 没有受到噪声干扰时对信号到达时间的测量误差。
把式(11)代入式(3)、式(9)即可得三站无源时差定位系统在没有受到噪声干扰时的相对定位误差。
同时,由上述分析可知,当侦察系统受到噪声干扰之后,其对信号到达时间的测量误差会受到影响,两侦察站对同一信号到达时间测量的差值也会随着出现误差。由此,分下列3种情况来分析噪声干扰对三站无源时差定位系统产生的干扰效果。
为了更好地分析噪声干扰对三站无源时差定位系统的干扰效果,本文只考虑系统内部噪声以及外加有源噪声的影响,忽略其他的影响因素。假设侦察设备接收机带宽为10MHz,噪声系数 F=1.5,所有侦察活动都是在常温下进行的,且各站没有受到噪声干扰时对信号到达时间测量误差经校正后的均方根为10 ns;其中三站及雷达辐射源位置坐标分别为 A(0,0)(主站)、B(10,0.5)、C(-10,0.5)、E(1,60)(以 km 为单位);同时 ,取式(2)中 β=0.1 μ s。
4.1 只有一个站受到噪声干扰时的噪声干扰效果分析
(1)只有主站受到噪声干扰时,由式(2)和式(8)可得
式中,SAi、JA分别为A侦察站接收到的信号功率以及有源噪声干扰功率,NAi表示A侦察站接收机内部热噪声功率,其余参数同上。
(2)只有一个副站(假设副站C)受到噪声干扰时,同理可得
式中,SCi、JC分别为C侦察站接收到的信号功率以及有源噪声干扰功率,NCi表示C侦察站接收机内部热噪声功率,其余参数同上。
把式(12)、(13)代入式(3)、(9)可得三站无源时差定位系统中主站或者一个副站受到噪声干扰后的相对定位误差,进而可得相应的干扰效果评估因子。
依据上述分析及条件,只有一个站受到噪声干扰时,干扰效果评估因子随干信比的变化如图2所示。
图2 只有一个站受干扰的情况下,干扰效果评估因子随干信比的变化规律Fig.2 The changing regular of relative positioning error evaluation factor according to interference power and information power ratio under the condition of one station interfered only
4.2 两个站同时受到噪声干扰时的噪声干扰效果分析
图3 两副站同时受干扰的情况下,干扰效果评估因子随干信比的变化规律Fig.3 The changing regular of relative positioning error evaluation factor according to interference power and information power ratio under the condition of two assistant stations interfered at the same time
与只有一个站受噪声干扰的分析相同,两个站同时受到噪声干扰时,干扰效果评估因子随干信比变化如图3和图4所示。
图4 一个副站和主站同时受干扰的情况下,干扰效果评估因子随干信比的变化规律Fig.4 The changing regular of relative positioning error evaluation factor according to interference power and information power ratio under the condition of one assistant station and primary station interfered at the same time
4.3 三站同时受到噪声干扰时的噪声干扰效果分析
同理可得,三站同时受到噪声干扰时,干扰效果评估因子随干信比变化如图5所示。
图5 三站同时受干扰的情况下,干扰效果评估因子随干信比的变化规律Fig.5 The changing regular of relative positioning error evaluation factor according to interference power and information power ratio under the condition of three stations interfered at the same time
比较图2~5可知:同一侦察站接收到不同干信比的情况下,随着侦察站接收到的干信比的增大,干扰效果越好;在侦察站接收到相同干信比的情况下,三站同时受到噪声干扰后的干扰效果大于两站同时受到噪声干扰后的干扰效果,两站同时受到噪声干扰后的干扰效果大于只有一站受到噪声干扰后的干扰效果(同时干扰两副站和只干扰主站的效果一致),只有主站受到噪声干扰后的干扰效果大于只有一个副站受到噪声干扰后的干扰效果。
5 结 论
本文通过分析噪声对时差定位系统定位误差的影响,对时差定位系统受噪声干扰后的干扰效果进行了研究。结果表明,噪声干扰对三站无源时差定位系统的干扰效果随着侦察站接收到的干信比的增大而升高;在侦察站接收到相同干信比的情况下,有主站受到噪声干扰后的效果比没有主站受到干扰后的效果要好。
[1]曾辉,曾芳玲,谷玉祥.一种三站时差定位的布站优化算法[J].电讯技术,2010,50(5):18-22.ZENG Hui,ZENG Fang-ling,GU Yu-xiang.A Station Layout Optimization Algorithm for Tri-Station TDOA Location[J].Telecommunication Engineering,2010,50(5):18-22.(in Chinese)
[2]陈永光,李昌锦,李修和.三站时差定位的精度分析与推算模型[J].电子学报,2004,32(9):1452-1455.CHFN Yong-guang,LI Chang-jin,LI Xiu-he.A PrecisionAnalyzing&Reckoning Model in Tri-Station TDOA Location[J].Acta Electronica Sinica,2004,32(9):1452-1455.(in Chinese)
[3]陈曦,彭华锋,同武勤.基于卡尔曼滤波的三星时差运动目标定位技术[J].电讯技术,2011,51(5):77-81.CHEN Xi,PENG Hua-feng,TONG Wu-qin.Tri-satellite Differential Time Offset Location Technology for Moving Target Based on Kalman Filter[J].Telecommunication Engineering,2011,51(5):77-81.(in Chinese)
[4]周一宇,安玮,郭福成,等.电子对抗原理[M].北京:电子工业出版社,2009.ZHOU Yi-yu,AN Wei,GUO Fu-cheng,et al.Principles of Electronic Warfare[M].Beijing:Publishing House of Electronics Industry,2009.(in Chinese)
[5]丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,2002.DING Lu-fei,GENG Fu-lu.Principles of Radar[M].Xi′an:Xidian University Press,2002.(in Chinese)
[6]罗景青.雷达对抗原理[M].北京:解放军出版社,2003.LUO Jing-qing.Principles of Radar Countermeasures[M].Beijing:Liberation Army Press,2003.(in Chinese)
[7]孙仲康,周一宇,何黎星.单多基地有源无源定位技术[M].北京:国防工业出版社,1996.SUN Zhong-kang,ZHOU Yi-yu,HE Li-xing.Mono-static,multi-static active and passive location techniques[M].Beijing:National Defense Industry Press,1996.(in Chinese)