具有闭环跟踪的连续波雷达动态目标模拟器设计
2012-09-28钟水和周家珍
钟水和,张 路,周家珍
(解放军63623部队,甘肃 酒泉732750)
1 引 言
连续波雷达的发射机发射功率较小,需要在箭上应答机的配合下才能完成目标跟踪,一般只有在航天任务和战略任务中安装应答机,开展任务的针对性训练较为困难。随着计算机和微波器件的迅速发展,雷达目标模拟器[1-5]越来越受到大家的重视。它满足测控系统的联调联试[6]、操作人员的针对性训练[7]和雷达跟踪性能的测试[8]的需要,节省了大量的训练经费和测试时间。
动态目标模拟器是针对于单通道连续波测速雷达而设计的,它为人员针对性训练和设备功能检查提供具有实战特性的射频信号。为了准确模拟实战和测试设备的接收灵敏度、测速精度等,要求动态目标模拟器能够模拟目标在飞行过程中不同速度下的多普勒频率、不同位置下的下行射频信号的强度以及目标在天线波束内与电轴的相对角度。
2 闭环跟踪的实现原理
连续波雷达的角误差解调采用单脉冲跟踪体制,它利用圆波导管的基本模TE11作为和模(基本模),用TM01模作为差模(误差模),实现同时波瓣制跟踪。
当目标偏离天线电轴的角度 φ很小时,从天线馈源所激励的和信号和差信号的表达式如下所示:

其中,ωc为载波信号角频率,其包含有目标信号的多普勒值fd;η为跟踪坐标系目标在天线平面的投影与水平轴的夹角;μ为天线归一化差斜率。
天线馈源所激励的和信号和经sin(Ψ t)调制的差信号被放大,并与本地正交相干载波进行混频、低通滤波后求出和信号的频率 ωc,即得到目标的多普勒频偏。输出的信号经过本地调制信号sin(Ψ t)混频滤波后得到方位误差电压和俯仰误差电压。
式中,φ为目标偏离天线波瓣的误差角度。
接收机得到的方位俯仰误差电压送入伺服控制器ACU,经校正后送至ADU,由ADU驱动天线,使天线电轴对准目标,完成闭环跟踪。
3 动态目标模拟器的实现
箭载应答机的微波信号经天线馈源激励后产生和信号和差信号(简称和差信号),动态目标模拟器实现了这两个信号的射频模拟,近似代替应答机,实现测速和测角等多项性能的检验[9]。
和差信号的幅度(A(r))、频率(fd)和相位(φ,η)均与目标航迹、天线坐标以及电轴的指向密切相关。为明确其相对关系,建立目标跟踪坐标系。以天线馈源中心作为坐标原点O,馈源口面作为y-z平面,z轴在水平面上,y轴与z轴垂直,x轴过O点,与 y轴、z轴构成右手坐标系,即为馈源波瓣方向。
目标偏离天线馈源波瓣方向Ox的角度为φ,即为射线OM与射线OM″的夹角;目标偏离电轴的距离为 MM″,MM″在y-z平面的投影为OM′,OM′与x轴的夹角为 η,即为射线 OM′与射线OM 的夹角。目标M在跟踪坐标系中的位置如图1所示。
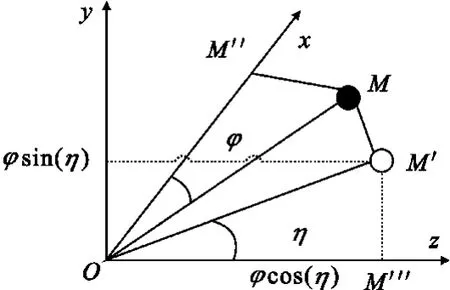
图1 动态目标M在跟踪坐标系中的几何示意图Fig.1Geometry of the dynamic target in track coordinate
3.1 幅度模拟
连续波雷达接收应答机下行信号的幅度主要由目标与天线的相对位置决定。应答机的发射功率和安装位置、微波信号的大气吸收、火箭的火焰衰减等均会影响连续波雷达的接收信号幅度。
根据目标航迹可以确定某一时刻目标与天线的相对距离R,按照微波信号的自由空间衰减规律得到衰减值,其中λ为射频信号波长。即和信号幅度如下所示:

其中,P为设备场放入口处接收电平,G1为箭上应答机的EIRP;G2为接收天线的增益;P1为射频信号的自由空间衰减;P2为天线极化衰减;P3为大气吸收;P4为天线馈源到接收机场放入口处的波导馈线衰减;P5为其他引起的信号衰减,即修正系数。从和差信号公式中可以发现,差信号电平与和信号电平成比例关系,比例系数为u×φ。由于箭上应答机天线的安装位置及其方向图的差异,各站布放地点不同导致同一个时刻各站接收电平出现差异,即上式中的P5,此衰减采用标定的方法来实现。
3.2 多普勒频率模拟
根据引导数据预知目标M在地心系下的位置、速度(x,y,z,x,y,z)、测站站址(xc,yc,zc),则目标与测站的空间距离R为

令在t、t+Δt、t+2Δt时刻,目标与发站的距离分别为 RT1、RT2、RT3,目标与测站的距离分别为RR1、RR2、RR3。如图 2 所示。
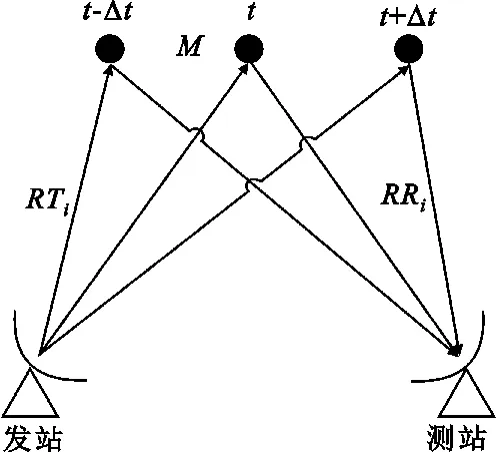
图2 目标多普勒模拟示意图Fig.2 Sketch map for target Doppler simulation
按照多普勒频率与径向速度的比例关系

式中,fd为目标多普勒,fr为接收载波频率,c为光速,V为目标径向速度,则得到t+Δt时刻目标多普勒参数如下所示:

t+2Δt时刻目标多普勒参数如下所示:

即可得到各时刻点测站的目标多普勒频偏,实现对动态目标的速度模拟。
3.3 相位模拟
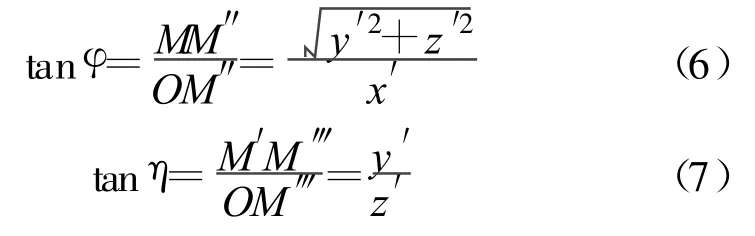
根据引导数据预知目标M在地心系下的位置、速度(x,y,z,x,y,z)、天线当前方位、俯仰角度A、E和雷达站址(L,B,H)。按照上式中的和差信号公式,只需要信号幅度 A、总误差角 φ和天线与水平轴夹角η。信号幅度A(r)与目标与测站的距离、箭上应答机的安装位置和天线的极化衰减等相关,角度误差 φ和η与天线波瓣方向和目标位置相关。
按照和差信号公式,和差信号的相位主要由目标与天线电轴的角度误差 φ和η决定。角度误差φ和η的估计主要涉及到目标地心系理论弹道(x,y,z)旋转变换至连续波雷达测站的测量系理论弹道(x0,y0,z0)上,而后再经过旋转变换到测站天线的跟踪坐标系弹道(x′,y′,z′),而后按照角度误差的定义得到 φ和η。
测量坐标系是以接收天线回转中心为坐标原点O,Y轴为过O点的垂线方向,向上为正;X轴为过O点的水平面内指向天文北;Z轴为过O点,与X轴、Y轴成右手直角坐标系。水平面即为X-Z平面。假设某个时刻,目标M在测量坐标系中的位置如图3所示,M在测量坐标系水平面上的投影为Q,则此时方位角度 A为射线OQ与X轴的夹角,俯仰角度E为射线OM与射线OQ的夹角。
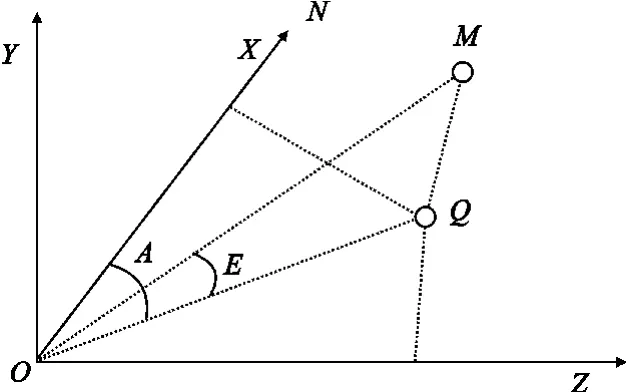
图3 目标M在测量坐标系中的位置示意图Fig.3 Sketch map for target in measure coordinate
测量坐标系向跟踪坐标系的转换为,测量坐标系绕Y轴顺时钟旋转A角,而后绕Z轴逆时钟旋转E角即为跟踪坐标系。则测量坐标系中的(x0,y0,z0)向跟踪坐标系中的(x′,y′,z′)的变换矩阵P 为
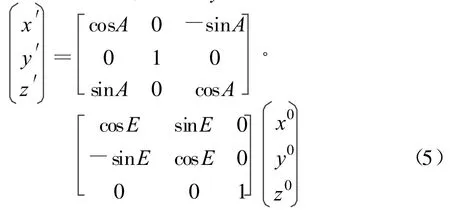
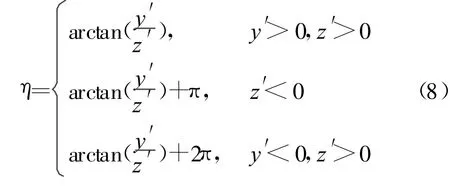
在跟踪坐标系下,假设目标M 的位置为(x′,y′,z′),则目标 M 在天线波瓣方向(即 x轴)的投影MM″的坐标为(x′,0,0),目标M在跟踪坐标系中y-z平面的投影OM′的坐标为(0,y′,z′),即可得到
由于反正切的输出角度为-90°~90°,而 φ的角度方位为 0°~ 90°,η的角度方位为 0°~ 360°,按照如下公式需要进行修正:
综合来看,动态目标模拟器模拟的射频信号流程图如图4所示。
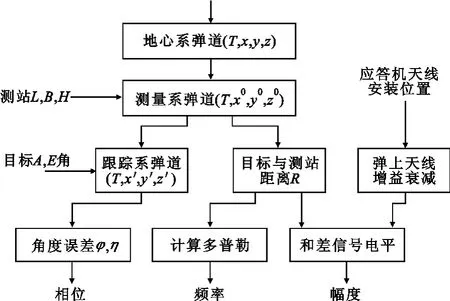
图4 模拟信号各参数产生流程图Fig.4 Flow chart for the generation of the simulate signal′s parameters
硬件采用研华CPCI工控机,采用2U标准的CPCI板卡结构。
信号处理部分采用美国 TI公司的TMS320C6416,完成射频和差信号幅度、多普勒频率和初始相位的计算,其具有600 MHz的内部工作时钟,能够满足200 Hz数据流的计算和与监控客户端及对其他处理模块的数据交流要求。采用Xilinx公司的大规模FPGA芯片XC4VLX100,采用DDS算法(1024点查表)完成射频和差信号和噪声信号的产生[10]。其具体的实现方法如图5所示。
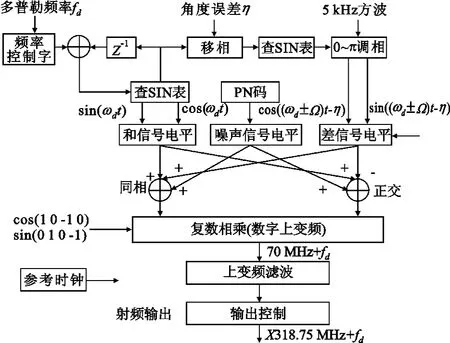
图5 模拟器原理框图Fig.5 Principle map for simulator
4 试验效果评估
选取该连续波雷达动态目标模拟器的某次任务联试的数据进行分析。中心每间隔50 ms将目标的位置和速度送到模拟器,模拟器根据弹道和天线位置模拟产生下行和差信号,耦合进入连续波雷达,完成动态目标的跟踪训练。
在整个跟踪时段内,接收机解调的方位俯仰误差电压较小并保持稳定,实时驱动天线使其对准虚拟目标,实现闭环跟踪。接收机解调的方位俯仰误差电压如图6所示。
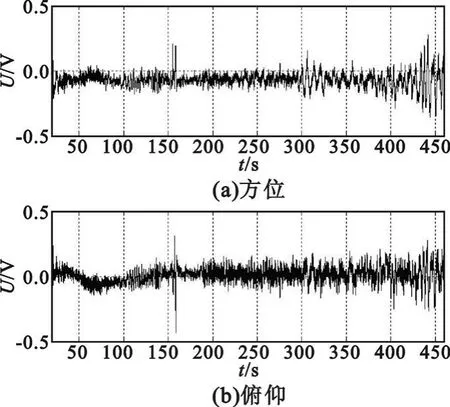
图6 自跟踪时段内方位俯仰误差电压Fig.6 Error unit of AZ and EL in auto tracking
5 结 语
本文设计了适应于连续波雷达的动态目标模拟器,实现了具有真实环境的下行射频信号产生,信号中包含动态目标与天线电轴的角度误差,经接收机解调后驱动电机进行人员的闭环跟踪训练。
该动态目标模拟器已安装在某型连续波雷达中,在试验任务联调联试、设备功能自动化检查和人员针对性跟踪训练中发挥了不可替代的作用。
[1]张振飞.动态目标信号模拟器的设计及实现[J].电讯技术,2009,49(8):94-97.ZHANG Zhen-fei.Design and Realization of a Dynamic Object Signal Simulator[J].Telecommunication Engineering,2009,49(8):94-97.(in Chinese)
[2]杜利平,苏广川.毫米波雷达导引头中频模拟器技术研究与实现[J].弹箭与制导学报,2004,24(3):295-298.DU Li-ping,SU Guang-chuan.The Design and Implementation of MMW IF Simulatro for Radar Seeker[J].Rockets Missiles andGuidance,2004,24(3):295-298.(in Chinese)
[3]卫健,陈定阶.雷达目标模拟器[J].现代雷达,2002,22(1):54-57.WEI Jian,CHEN Ding-jie.Radar Target Simulator[J].Modern Radar,2002,22(1):54-57.(in Chinese)
[4]肖鹏斌.多普勒频移模拟器的设计[J].仪器仪表用户,2011,19(1):63-66.XIAO Peng-bin.Design of Doppler frequency-shift simulator[J].Electronic Instrumentation Customer,2011,19(1):63-66.(in Chinese)
[5]胡文华,王志云,代建鹏.雷达回波模拟器设计与应用[J].仪器仪表学报,2003,24(4):113-115.HU Wen-hua,WANG Zhi-yun,DAI Jian-peng.Design and Application of Radar Echo Simulator Based on Virtual-instrument[J].Chinese Journal of Scientific Instrument,2003,24(4):113-115.(in Chinese)
[6]马慧萍,向海飞.用于训练模拟器的雷达真实目标航迹提取算法[J].电子科技,2011,24(3):59-61.MA Hui-ping,XIANG Hai-fei.An Extractive Algorithm of Radar True Target Tracking Data Used for the Training Simulator[J].Electronic Science&Technological,2011,24(3):59-61.(in Chinese)
[7]刘培毅,刘鑫,侯龙涛.一种雷达中频信号模拟器实现方法[J].战术导弹技术,2007,9(5):86-89.LIU Pei-yi,LIU Xin,HOU Long-tao.The Realization of the Radar Simulator[J].Tactical Missile Technology,2007,9(5):86-89.(in Chinese)
[8]张啸,高新义,李迎纲.一种雷达模拟目标实现的方法[J].现代电子技术,2011,34(3):79-81.ZHANG Xiao,GAO Xin-yi,LI Ying-gang.Implementation Method of Radar Simulative Target[J].Modern Electronics Technique,2011,34(3):79-81.(in Chinese)
[9]向道朴,黎向阳,孟宪海.一种通用雷达回波模拟器的设计与实现[J].现代雷达,2007,29(10):84-86.XIANG Dao-pu,LI Xiang-yang,MENG Xian-hai.Design and Implementation of a General Digital Radar Echo Simulator[J].Modern Radar,2007,29(10):84-86.(in Chinese)
[10]赵泉,江伟明.通用雷达射频信号模拟器设计与实现[J].船舶电子工程,2009,29(9):198-201.ZHAO Quan,JIANG Wei-ming.Design and Realization of General Radar RF Signal Simulators[J].Ship Electronic Engineering,2009,29(9):198-201.(in Chinese)
