潜艇操纵性自航模试验系统设计与组成
2012-09-27陈东宾
陈东宾
(海军驻温州地区军事代表室 舟山 316000)
0 引 言
模型试验是目前研究潜艇操纵性的主要手段,而模型试验又分为自航模试验和拘束模试验两种。其中自航模试验在研究潜艇耦合水动力导数和大机动性条件下的操纵性具有独特的优势。
真正的潜艇自航模技术开发较晚。1957年,日本首先采用长5 m、重2 t的潜艇自航模,在神户港进行垂直面操纵性试验;1968年,法国巴黎水池在圣德罗兹湾进行了海上潜艇自航模试验,试验用的潜艇模型长6.3 m,分段组装并采用“程控+遥控”的方式进行操纵;1994年,英国水下防御技术展览会上展出英国国防研究局研制的无人驾驶潜艇研究模型长4.5 m,潜深可达25 m。美国海军在1960年曾用“拖辫子”的方式(即由水下潜艇自航模指挥台围壳伸出一根天线,或天线上带小球作为水下接受遥控信号的接受装置)开展自航模水下机动试验;到1978年,研制了洛杉矶级首艇的自航模型,长约9.5 m,采用铝合金壳体;1985年和1997年,为了验证“海狼”级潜艇和“弗吉尼亚”级潜艇的设计,在极其保密的情况下又分别研制了1∶4的大尺度自航模 LSV-1“科卡尼号”和 1∶3.4 的 LSV-2“卡特斯罗特号”,该船长度和排水量分别为27.43 m、168 t和33.8 m、205 t。
在潜艇自航模试验展开过程中,最重要是需满足试验要求的潜艇模型的加工。基于试验要求,模型应具备浮力、纵倾力矩的调整能力和螺旋桨调速能力,并且需要在模型上装载可弃压载。基于自航功能的实现,模型应具备电力系统(包括直流、交流),自动控制系统,数据采集记录系统,运动执行机构,与岸基设备的远程通讯系统。为了方便在岸上检测潜艇的航行轨迹,还应添加水声定位系统。下面分别就自航模各个系统的组成进行阐述。
1 自航模模型整体构造
自航模型设计完全模仿某型潜艇的线型和特性,由壳体、内胆框架、艏结构、艉结构以及围壳组件等组合而成。模型的制作借鉴了鱼雷的先进结构形式和加工工艺的要求,其壳体为纯钢制结构,由5个分段构成,除艏部和艉部分段,其他3个分段的底部都安装有导轨,方便内胆框架的装配。内胆框架是艇内设备的主要载体,基本上所有的设备都固定在该框架上。艇艏分段为了加强安全性能由双层壳体组成,艇艉分段上安装了艉舵系统、主电机及艉轴水密部件。模型指挥台围壳采用钢性塑料制作,内部用于安放长波接收机,并且在围壳顶盖通过水密螺栓连接外接天线。该潜艇模型结构突出的优点是水密性能好、接口结构强度高、定位准确,同时为了便于试验状态的调试以及设备的检查维修,拆卸也比较简单。其详细结构见图1。

图1 自航模总布置示意图
2 自航模各功能系统构造
自航模内的各种设备较多,从实现其自动航行的功能角度分类,可以分为电力系统(包括直流和交流)、自动控制系统、数据采集记录系统、运动执行机构、与岸基设备的远程通讯系统以及水声定位系统。以上各系统的组成以及之间相互关系参见下页图2。
下面就其中的通讯系统、定位系统和自动控制系统予以说明。
2.1 长波遥控系统
潜艇自航模型在进行水下各种运动性能测试和实验时,均处于潜航状态,并根据实验需求进行潜航时的各种操控,操控的指令由通信系统来传输。遥控系统是否可靠有效和实时性的好坏直接关系到自航模能否正常潜航、潜航时的安全性以及实验数据的有效性[1]。

图2 自航模功能系统组成结构
要使系统具备上述性能,水下无线电通信是其研制的一个难点。无线电通信技术的原理在于:导体中电流强弱的改变会产生无线电波[2]。利用这一现象,通过调制可将信息加载于无线电波之上。当电波通过空间传播到达收信端,电波引起的电磁场变化又会在导体中产生电流。通过解调将信息从电流变化中提取出来,即可实现信息传递[3]。因此,模型采取以无线电长波为载体的长波无线遥控系统来完成潜航时的遥控,该系统由便携式可移动手持遥控器、陆基短波发射机、陆基长波大功率发射机、艇载长波接收机、艇载短波接收机、译码与驱动、短波/长波收发天线等部分组成。如图3所示。
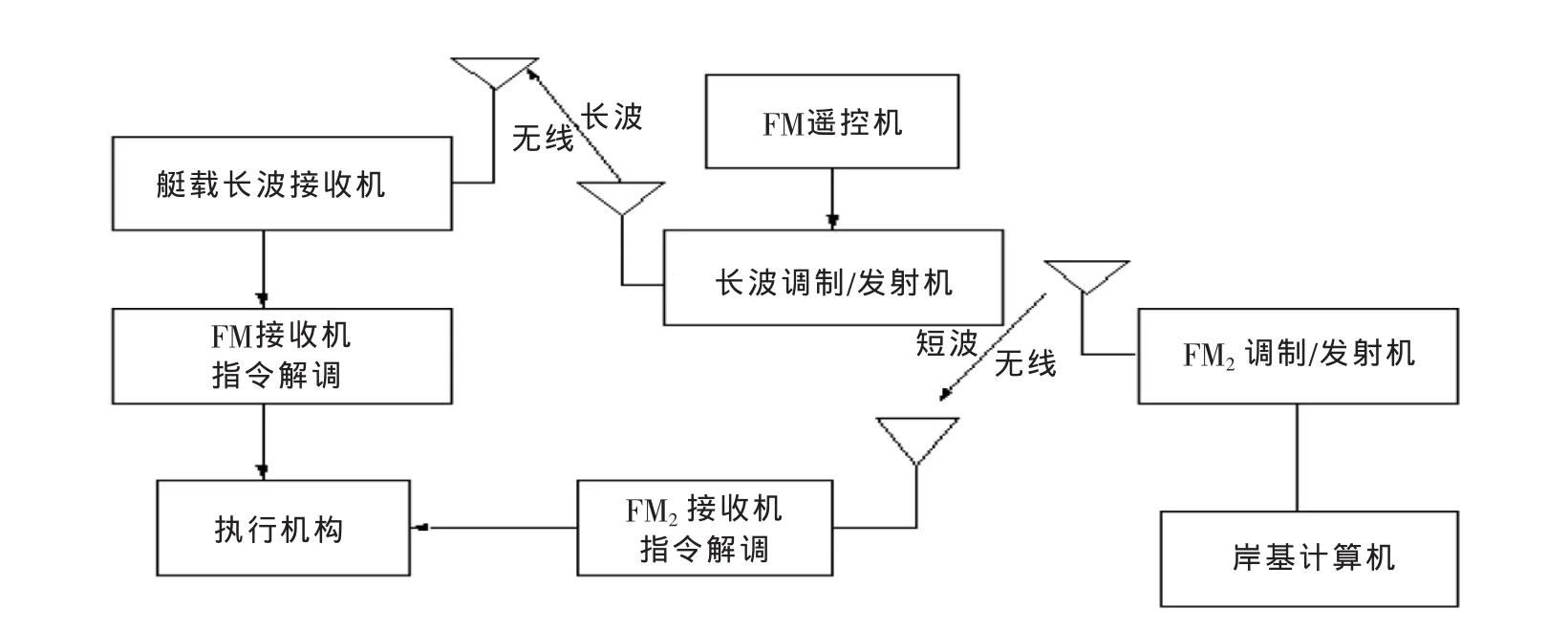
图3 长波无线遥控系统组成
2.2 自航模水声轨迹定位系统
由于自航模水下试验无法从水面进行观测,一些传统的定位方法如激光法、镜面反射法等已不再适用[4]。然而,为了解自航模在水下的运行状况、确保其航行安全,必须实时了解自航模的位置和深度。这是自航模水下试验的一个关键技术,当前一个比较经济适用的方法是采用水声方法对自航模在水下的位置进行定位[5]。建立自航模运动区域的坐标系,由自航模通过水声换能器发射水声信号,再由固定于已知坐标位置的水声换能器接受该信号,并传入后续设备对该信号进行分析处理,运用适当的计算最终得到自航模在该坐标系中的坐标。具体工作原理如图4所示。

图4 水声定位系统工作原理
2.3 艇载控制系统
操纵系统由艇载嵌入式计算机、I/O接口卡、伺服电机驱动电路、控制信号转换电路、反馈信号形成电路、反馈信号接收电路、传感信号形成电路、小舵机开关信号形成电路等部分组成。其信息流程框图如图5所示。
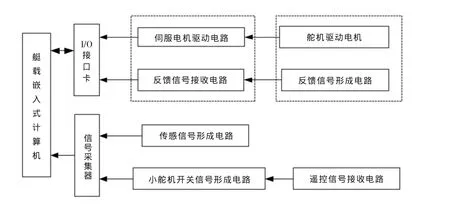
图5 操纵系统信号流程图
反馈信号接收电路用来接收有关自航模运行的主推电机转速、方向、姿态、艇内积水与否等反馈信息,其信息流向是单向的。
伺服电机驱动电路接收来自I/O接口卡的伺服电机驱动信号,直接驱动控制潜艇各个舵的伺服电机以控制舵角。
压力信号、内部湿度信号、三个陀螺(纵倾陀螺、横倾陀螺和航向陀螺)信号等信息则由传感器通过传感器电路进入信号采集器送至计算机。
作为辅助控制的小舵机可以接收岸上传来的操纵信号,小舵机根据操纵信号执行的开关动作,形成开关信号送入计算机,各开关信号控制与其对应的执行机构完成相关动作。
作为整个操控系统的信息交流、存储、控制中心,艇载嵌入式计算机可以通过无线网卡实现与岸基计算机的信息交流,并按照指令要求完成各种动作。
3 自航模系统存在问题
通过自航模试验,反映出潜艇自航模目前仍存在一些问题,集中表现在:
(1)缺乏模块化设计模型的手段。目前自航模的设计,大量依靠工人的加工经验,会导致模型在调整浮态和重力分布难以满足实艇动力要求,不仅会影响实验进度,还会导致由于不能满足相似规律而出现不合理的试验结果。这一问题需要进一步研究。
(2)缺乏有效的方法采集潜艇自航模的速度信号。潜艇自航模属于低速运动体,其惯性较大,一般的振动速度传感器不能有效测量其实时速度。若通过水声定位系统来差分其速度,而水声定位系统定位误差在分米级、采样频率为每秒一次、该方法测量得到的结果误差与模型的运动速度在同一个量级,也不可行。因此,一种切实可行且有效的模型速度测量系统亟待开发。
(3)在大机动条件下,由于模型周围流场湍流边界层的影响,水声信号会出现暂时失效的现象,这与水声发射头的布放位置和形式有关,需要进一步研究其中关系,以克服水声信号暂时消失的问题。
4 结 论
本文介绍了一种已用于试验的潜艇自航模试验系统的结构与组成,并着重介绍了其中的长波遥控、水声定位和自动控制子系统。通过实际的测试证明了自航模试验技术的可行性,取得的试验结果对潜艇操纵性的研究有一定的指导意义,也为持续发展潜艇自航模试验技术开拓了广阔前景。
[1]毕毅,王波,李和平.水下自航模模型无线长波遥控系统[J].船舶工程,2002,(6):72-74.
[2]沃特A.D.甚低频无线电工程[M].北京:国防工业出版社,1973:22-48.
[3]沈琪琪,朱德生.短波通信[M].西安:西安电子科技大学出版社,1989:31-56.
[4]王波,毕毅,李和平.水声式轨迹实时测量系统[J].船舶工程,2003,25(2):53-55.
[5]Coates R.Underwater Acoustic Communication[M].USA:Sea Technology,1994:41-47.