陀螺声音对平台性能影响分析
2012-09-26邓方艺刘思超
邓方艺,刘思超
(中国空空导弹研究院 河南 洛阳 471009)
陀螺稳定平台在环境试验条件下性能恶化是空空导弹型号研制中要解决的重大技术问题。平台在常温时尽管能达到很高的性能,但在高低温、振动等环境试验[1]条件下稳定平台的性能有着不同程度的下降,甚至造成产品的失效。大量试验和理论分析表明,陀螺稳定平台在环境试验时的失效与陀螺的声音有密切关系。通过对陀螺声音的分析和研究,减少由于产品关键元器件失效造成的损失,对提高陀螺稳定平台在环境试验条件下,尤其是寿命条件下的可靠性有着十分重要的意义和价值。
1 陀螺稳定平台工作的简要原理
陀螺稳定平台实际是由一个三自由度陀螺仪作为敏感元件的双轴稳定平台。在陀螺仪的内、外环上分别安装有角传感器和力矩器。在平台的内、外环轴上分别安装一台伺服直流电机,并在壳体上配置伺服电路、功率放大器和传动放大器。利用陀螺仪的基本特性:定轴性和进动性,即可实现平台的稳定和目标的跟踪。
为了说明稳定的物理过程,给出陀螺稳定平台结构图,如图1所示。
图中:H——陀螺动量矩;
ASy,ASz——沿陀螺外环轴、内环轴的角传感器;
TSУ,TSz——沿陀螺外环轴、内环轴的力矩器;
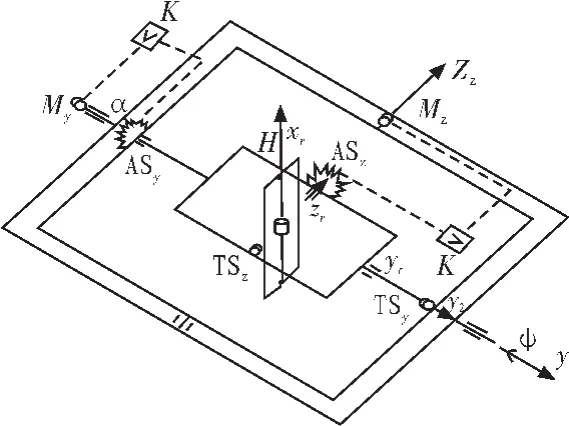
图1 陀螺稳定平台结构图Fig.1 Structure diagram of the gyro stabilized platform
MУ,Mz——沿平台外环轴、内环轴的传动电机;
K——放大器;
设起始时平台与三自由度陀螺仪外环平面保持一致,陀螺仪动量矩矢量垂直与平台平面,则此时角传感器ASУ,和ASz输出为零,一旦导弹弹体相对Y通道存在干扰角速度如时,平台将绕Y轴转动,由于陀螺在空间的定轴性,在平台台体与陀螺外环间将产生失调角αΓ,角传感器ASУ将输出正比于此失调角的信号,经放大后驱动传动电机MУ转动并带动平台以Y绕Y轴反方向旋转,使平台恢复到原先的位置(同时角传感器ASУ输出的失调角信号也减小到零,这样就保持了平台对Y通道的稳定,Z通道的稳定与Y通道一样)。
平台依靠Y、Z二条稳定回路始终跟随着陀螺在惯性空间的位置,也就实现了平台的空间稳定,由于结构设计中天线是用连杆与平台相连,这样就实现了天线的空间稳定,在整个稳定系统中,陀螺仪只起着提供一个坐标基准的作用。
2 陀螺声音对稳定平台影响原理分析
由于三自由度陀螺仪是平台中最重要的器件,其性能不仅影响导引头的跟踪角速度、平台的漂移、相对稳定性,甚至影响和决定全弹的寿命。三自由度陀螺仪中的壳体、外环、内环等零件结构复杂,精度要求高,加工周期长。一般情况下其要经过毛胚铸造—粗加工—精加工—组合加工—装配—测试等环节。在精度要求上,例如壳体、外环和内环轴承孔精度和相应的位置度精度,轴精度可达5级,孔精度为6级。在精度测量上,最佳的方法是用三坐标测量仪进行测量。
陀螺启动时,马达转子转速从静止逐步提高,如果马达的转速与平台产生谐振[2-3],陀螺将会出现声音的变化,影响系统的动态性能,使系统易于损坏。伺服机械结构是伺服系统[4]的控制对象,也是伺服系统的重要组成部分,当产品的谐振频率过低时,将会对产品机械结构造成损伤,随着环境试验将进一步加剧产品结构的磨损。因此,通过对产品声音的研究,早期剔除不合格品,可以提高产品的可靠性。
在对伺服系统分析时,将执行电机[5]至控制对象之间的机械传动看成是绝对刚性传动。当控制对象的转动惯量不大,系统跟踪角加速度不高,而传动制造的刚度较大时,可以忽略弹性扭转变形。但如果转动惯量[6]较大时,系统通频带又比较宽,系统运动过程中传动轴的弹性扭转变形将造成明显滞后,传动装置在传递运动[7]时就会含有储能的元件。由于它速度阻尼小,其传递特性将出现较高的谐振峰,形成机械谐振,从而对系统的动态特性产生较大影响。甚至使系统不稳定,在某型谐振频率下还可能损坏精密的惯性器件。机械谐振是由转动惯量和传动装置的材料、结构及尺寸等因素决定的。刚性越差,机械谐振频率就越低。通常伺服系统的机械传动装置都具有一个谐振频率,但有的不止一个谐振频率。
对于陀螺声音的差异现象,一个陀螺由30多个组件和近百个零件组成,每个零组件各有自己的固有振动频率,在陀螺电机高速旋转的激励下,会有不同的振动反应。当某一零组件的振动频率接近陀螺电机的振动频率时,振动会强烈一些,陀螺通电发出的声音成份也会相应变化。而对于同一种陀螺产品之间的声音有大有小的现象,陀螺通电工作的声音是否异常和陀螺性能、寿命之间存在对应关系。
3 陀螺声音对平台影响试验验证
我们认为,陀螺声音的差异能够部分表征陀螺内部装配的差异,声音明显偏大且不平稳的陀螺尽管性能满足要求,但陀螺电机轴承由于摩擦会逐渐损耗,可靠性必然不如声音平稳的陀螺,应在装配过程中和出厂前对声音加严控制。从我们对陀螺声音的测试情况来看,受目前条件限制无法对陀螺声音差异制定具体的判别标准,只能采取专人专听的办法控制陀螺声音的差异。为此,我们设计了陀螺声音的测试方法,并结合产品实际情况进行了验证,获得了较好的效果。
设置35670动态信号分析仪的工作频率为听觉范围频率:20~20 000 Hz;,将陀螺固装于稳定平台内,放在回转工作台上;将声音传感器固定在距陀螺50 mm处,测试过程中保持传感器与陀螺的距离不变;采集背景声音;陀螺加电,采集声音。为便于对比,对可能存在故障隐患的产品进行了多次测试。测得的声音频谱和背景声音测试结果如图2和图3所示。
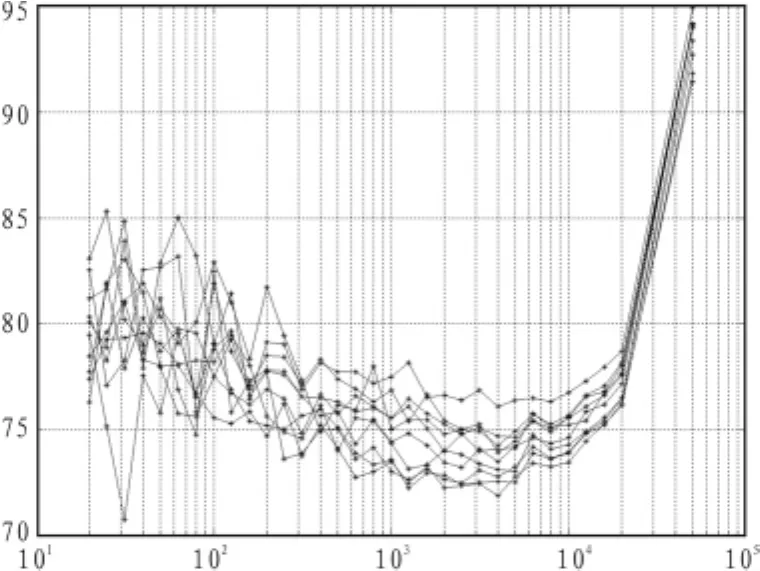
图2 陀螺声音频谱测试图Fig.2 Testing diagram of the gyro voice spectrum
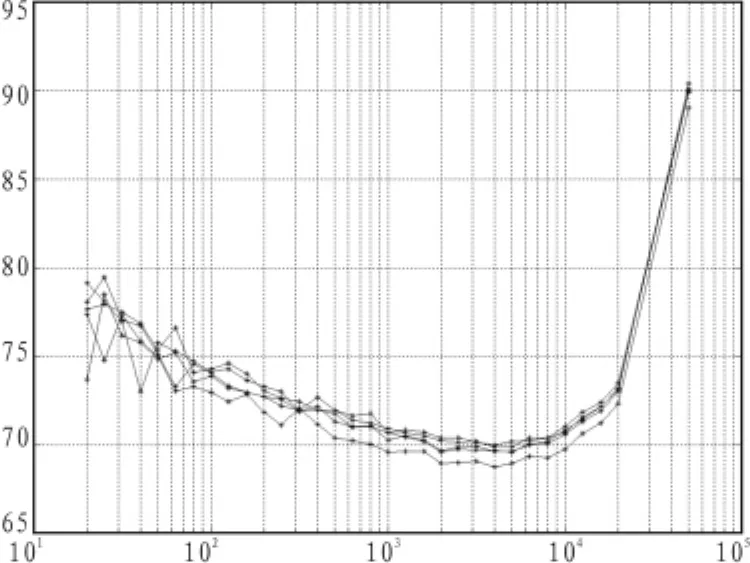
图3 陀螺背景声音频谱测试图Fig.3 Testing diagram of the gyro background voice spectrum
从以上结果曲线来看,背景声音影响到测试结果的准确性,应将背景噪声成分从测得的声压中扣除。因此准确测量分析应该保证测试环境的低噪声,减小背景声音的影响,并要确定背景噪声对测量数据的修正值;根据《GJB673-89陀螺电机通用规范》中的规定,电机不通电时,在宽频带1/3倍频程和窄频带范围内,一般环境噪声比电机在该频带下的最大噪声至少低14 dB。由数据结果曲线中可以看到,陀螺测试时的总声压与背景声压相比,并无明显区别,但是,在低频段(20~1 000 Hz)声音:由图2陀螺测试的采样数据曲线可以看到,低频段数据变化较大;对比一个陀螺的全部测试结果,低频段数据随机性较大;结合背景声音的测试数据,可以看到,在自然环境下进行陀螺声音测试,该产品低频段数据变大且存在较大的随机性。通过专用的测试分析仪器及测试分析工具,说明该产品性能存在不稳定性。
4 结 论
三自由度陀螺在机械装配过程中很难保装配的一致性,可能在装配中存在假间隙。经过稳定平台的高低温试验和随机振动试验,使陀螺轴向存在的假间隙得以显现。而轴向间隙变大使陀螺质心偏移,产生不稳定的随机有害力矩,该力矩使陀螺漂移性能超差。通过对陀螺声音的分析和试验验证,可以判定陀螺性能是否存在问题,从而避开由于陀螺故障导致稳定平台的失效。
[1]黄正祥.高低温环境试验中的武器温升分析[J].弹箭与制导学报,2000(4):61-64.
HUANG Zheng-xiang.The analysis of weapon’s temperature rise in the environmental test of high-low temperature[J].Journal of Proiectiles, Rockets, Missiles and Guidance,2000(4):61-64.
[2]黄斌.一种新的谱随机有限元方法[J].武汉理工大学学报,2004,26(5):42-45.
HUANG Bing.A new spectral stochastic finite element method[J].Journal of Wuhan University of Technology,2004,26(5):42-45.
[3]PAN Jie,Hansen C H.Total power flow from a vibrating body to a flexible panel through multiple elastic mounts[J].Journal of Acoustical Society of America,1992,92(2):895-907.
[4]潘峰.基于dSPACE半实物仿真技术的伺服控制研究与应用[J].系统仿真学报,2004,16(5):77-80.
PAN Feng.The research and application of dSPACE-based hardware-in-the-loop simulation technique in servo control[J].Journal of System Simulation,2004,16(5):77-80.
[5]陈殿生.陀螺稳定跟踪平台的滑模摩擦补偿双环控制研究[J].高技术通讯,2011,21(2):173-178.
CHEN Dian-sheng. A study of sliding model frictioncompensation double loop controlofagyrostabilized tracking platform[J].Chinese High Technology Letters,2011,21(2):173-178.
[6]McKerley C.W.A model for a two degree of freedom coupled seeker with mass imbalance[J].Proceedings of the IEEE,1996(4):11-14.
[7]林利红.精密传动系统的机电耦合建模及仿真分析[J].重庆大学学报:自然科学版,2007,30(11):18-22.
LING Li-hong.Modeling and simulation analysis of the electromechanical coupling facts about precision transmission system [J].Journal of Chogqing University:Natural Science Edition,2007,30(11):18-22.
