数控机床用磁悬浮系统自抗扰控制仿真研究*
2012-09-26刘春芳任修孟王丽梅
刘春芳 任修孟 王丽梅
(沈阳工业大学电气工程学院,辽宁沈阳110870)
随着磁悬浮技术的日益成熟及其在工业上的应用日益广泛,将磁悬浮技术应用于数控机床中将成为可能。磁悬浮技术通过磁场力把移动部件浮起,采用直线电动机驱动部件运动。与传统的机床相比,磁悬浮移动部件具有无机械摩擦、无接触磨损和无需润滑的优点。目前对这方面的研究有很多。文献[1]基于反馈线性化方法,针对横梁悬浮系统线性模型设计了PI状态反馈控制器。文献[2]针对龙门移动式数控机床在运行过程中参数摄动以及未建模动态参数可能对系统造成的影响,结合鲁棒H∞理论的控制方案设计出自适应积分滑模控制器。文献[3]对磁悬浮列车采用H∞状态反馈设计控制器,抑制扰动使列车稳定悬浮。此外,模糊、神经网络等先进控制策略也在磁悬浮控制器得到应用[4-5]。这些文献都把模型先线性化,然后再设计控制器,因而不可避免地带来了一些原始误差。本文针对磁悬浮系统非线性模型进行控制器设计,避免了线性化带来的模型误差。
自抗扰控制方法是韩京清教授在非线性PID控制律的基础上提出发展起来的一种新型非线性控制算法。它利用非线性跟踪-微分器安排过渡过程,通过扩张状态观测器实时估计出系统内外的综合扰动,并予以前馈补偿,此外还结合非线性反馈结构进一步提高控制性能。该技术具有超调小,动态响应快,精度高,抗干扰能力强及算法简单等众多优点[6-7]。
龙门移动式加工中心结构[8-9]如图1所示。龙门移动式数控机床横梁悬浮系统是一个典型的非线性不稳定系统。由于其自身的机械和电气特性很难获得精确的数学模型,悬浮控制系统必须保证在模型不精确和各种外部干扰的情况下,提供良好的悬浮性能。自抗扰控制技术将系统的未建模动态和未知扰动都归结为系统的总扰动而进行估计并给予补偿,既能使控制器对系统的外部干扰和内部参数变化表现出较强的抗扰动能力,又能克服系统模型的不精确性对控制器设计造成的影响。因此本文采用自抗扰控制技术对悬浮气隙进行控制。

1 横梁磁悬浮系统
1.1 数学模型
龙门移动式数控机床中的悬浮系统,其悬浮为两端同步悬浮,要求保证悬浮的同步性、稳定性和精确性。而本文主要对单电磁悬浮系统给予控制,保证悬浮的精确度和稳定性。在建立模型时,忽略漏磁通的影响和电磁铁与导轨中的电阻,认为磁动势均匀分布在气隙上,并且电磁铁只在垂直方向上运动。由文献[1]和[2]得单电磁悬浮系统的数学模型为
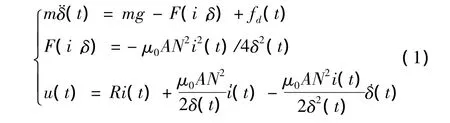
式中:δ(t)为悬浮间隙;F(i,δ)为电磁铁的电磁吸力;m为悬浮横梁的质量;fd(t)为外部干扰;i(t)为控制线圈的电流;u(t)为控制线圈两端的电压;φm为气隙磁通;φ1为漏磁通;g为重力加速度;μ0为真空磁导率;A为铁芯面积;N为电磁铁绕组匝数;R为电感等效电阻。
1.2 系统非线性状态方程
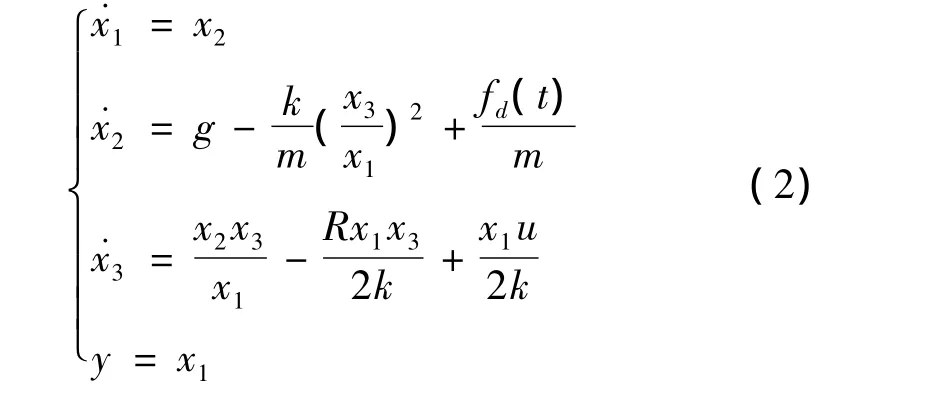
选取状态变量x1=δ,x2=˙δ,x3=i,选择输出y=δ=x1,令 k=μ0N2A/4,根据系统的数学模型(1),得到系统的非线性状态方程为:
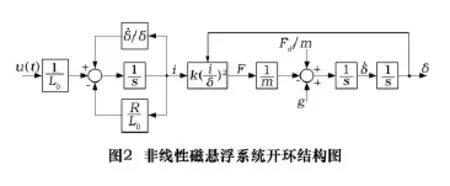
设L0=μ0N2A/2δ,非线性磁悬浮系统的开环结构如图2所示。
2 自抗扰控制器设计
典型自抗扰控制器由跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈控制律(NLSEF)3部分组合而成。本文根据自抗扰控制器的典型结构在非线性状态方程(2)基础上设计一阶电流环和二阶位置环的双环自抗扰控制器,如图3所示。电流环的作用是加快电流响应速度,使控制量尽可能快地作用到控制对象上,位置环的作用是稳定系统并使其达到预定的控制精度。δ0为系统悬浮气隙给定,δ为实际悬浮气隙输出。
2.1 电流环控制器设计
横梁悬浮系统工作时,电磁铁发热严重,导致电感和电阻值变化,系统模型参数变化,扩张状态观测器将这些内部参数变化和外部扰动归结为总扰动进行估计并给予补偿,得到更好的控制效果。控制器形式如下。
二阶扩张状态观测器:


非线性反馈P:

β04、β05、δ5为二阶扩张状态观测器参数,K、α3、δ6为非线性反馈P的参数,b2是与系统模型有关的参数,e2为电流环控制器中二阶扩张状态观测器估计的电流与系统输出电流间的误差。
2.2 位置环控制器设计
在设计位置环控制器时,将电流环看成直通,进行设计。由于给定是常值,可以不安排过渡过程,给定的导数为零,在系统仿真时用常数零给定。设计的控制器如下。
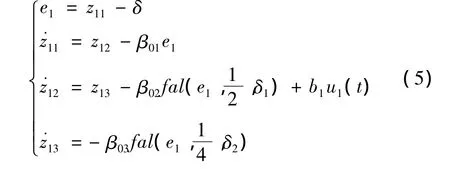
三阶扩张状态观测器:
非线性反馈PD:
在以上式中,非线性函数 fal(ε,α,δ)为:

式(5)中,β01、β02、β03、δ1、δ2为三阶扩张状态观测器参数,e1为位置环控制器中三阶扩张状态监测器估计的悬浮气隙与系统输出悬浮气隙间的误差。式(6)中,Kp、Kd、α1、α2、δ3、δ4为非线性反馈 PD 的参数。参数b1与电流环控制器中的b2一样,是与被控对象有关的参数,也是扩张状态观测器和扰动补偿共用的参数,它们对系统性能起很重要的作用,决定控制系统抗扰动范围。
2.3 参数整定
对于位置环非线性扩张状态观测器中参数β01、β02、β03来说,β01在一定范围内增大对系统控制品质并无较大影响,当β01过大时容易引起发散振荡,过小时系统整体的跟踪效果变差;β02的过大会产生高频噪声信号,导致系统控制品质恶化,过小会使振荡次数增加,振荡幅度加大;β03过大时,系统的跟踪速度加快,但容易引起振荡,过小时系统的跟踪速度减慢,过渡过程趋于平稳,不易引起振荡,但容易引起较大的相位滞后,甚至跟踪不上。
对于非线性反馈PD中参数 Kp、Kd来说,Kp过大时,振荡次数增加,过小时跟踪速度变慢;当Kp和Kd越大,系统的响应速度越快,但过大就会造成输出超调。
对于电流环一阶自抗扰控制器的参数与位置环二阶自抗扰控制器中对应的参数对系统的影响类似。
控制器其他参数根据经验取值,对于参数b1和b2来说,采用试凑法确定。
3 系统仿真
为了实现龙门移动式数控机床高加工精度的目标,将横梁悬浮起来彻底消除摩擦,要求横梁在任何情况下都能稳定地悬浮在1.6 mm高度,并在有内外各种扰动影响的情况下具有很强的鲁棒性。根据上面所设计的控制器,利用仿真软件MATLAB/Simulink进行仿真[10]。
龙门移动式数控机床横梁悬浮系统参数为:悬浮横梁质量m=600 kg,铁芯面积A=0.65×0.03 m2,电磁铁绕组匝数N=380,电阻R=1 Ω,期望悬浮间隙δ0=1.6 mm。
对于横梁悬浮系统工作时,内部参数变化主要是电磁铁电感电阻的变化。图4为自抗扰控制时电阻变化前后的系统响应输出曲线。从图中看出,电阻为1 Ω时系统响应曲线几乎无超调,横梁稳定悬浮在1.6 mm处;电阻由1 Ω变成2 Ω后,悬浮气隙和控制电流曲线有微超调外,和电阻为1 Ω时的响应曲线几乎重合,说明自抗扰控制器对系统内部参数变化有较强的抗扰动能力。

横梁悬浮系统工作时,外部扰动来源主要是加工工件过程中对悬浮横梁产生的干扰力。图5为在t=0.5 s时加103N扰动的系统响应输出曲线。在t=0.5 s时加扰动,原平衡被打破,悬浮气隙变大,控制器根据检测的气隙信号增大电磁铁电压来增大电磁力,减小气隙,电压变大伴随电流变大。从图5中看出,气隙与电流剧变后在0.2 s内又恢复稳定,悬浮气隙稳定在1.6 mm处,电流达到新的平衡点并保持稳定,证明控制系统具有抗扰动能力。

4 结语
本文在龙门移动式数控机床中引入磁悬浮技术彻底消除摩擦,并针对横梁悬浮系统建模不精确及外部干扰和内部参数变化时可能对系统造成的影响,采用自抗扰控制技术,通过扩张状态观测器将系统建模不精确和内外未知扰动作用都归结为对系统的总扰动而进行估计并给予补偿。仿真结果表明,自抗扰控制器控制磁悬浮系统输出微超调,动态响应速度快,对系统内部参数变化和大扰动具有强鲁棒性。
[1]王丽梅,石佳.龙门移动式数控机床横梁磁悬浮控制系统研究[J].制造技术与机床,2008(2):79-82.
[2]刘春芳,安明伟,王丽梅.移动式数控机床横梁磁浮系统的滑模-H∞控制[J].沈阳工业大学学报,2010,32(4):443 -448.
[3]孟范伟,何联,王毅,等.磁悬浮系统的H∞状态反馈设计[J].电机与控制学报,2009,13(2):282 -286.
[4]张静,姚小伟,武俊峰.磁悬浮系统的模糊控制研究[J].哈尔滨理工大学学报,2006,11(6):1 -4.
[5]许杰,刘春生.基于神经网络的磁悬浮球自适应控制器[J].机电工程,2007,24(3):22 -24.
[6]韩京清.自抗扰控制技术[M].北京:国防工业出版社,2008.
[7]夏长亮,俞卫,李志强.永磁无刷直流电机转矩波动的自抗扰控制[J].中国电机工程学报,2006,26(24):137 -142.
[8]刘春芳,迟青光,郭庆鼎.机床横梁悬浮系统的动态积分滑膜变结构控制器的设计[J].制造技术与机床,2011(2):73-76.
[9]刘春芳,安明伟,王丽梅.加工中心龙门磁悬浮高度的滑膜-H∞控制[J].制造技术与机床,2010(1):79 -83.
[10]王兵树,姜萍,林永君,等.SIMULINK中自抗扰控制技术自定义模块库的创建[J].系统仿真学报,2010,22(3):610 -615.
