光伏发电用推挽正激升压电源的研究
2012-09-25何占宁夏东伟刘玉朋
何占宁,夏东伟,刘玉朋
(青岛大学自动化工程学院,山东 青岛266071)
0 引 言
传统的化石能源逐渐枯竭与严重的环境污染制约和影响了世界经济的可持续发展。能源的需求越来越大,为了实现经济的可持续发展,世界各国都将太阳能发电作为发展的重点。在各国政府的大力支持下,光伏产业发展迅速,从世界范围来讲,光伏发电完成了初期的开发和示范,现在正向大量生产和规模化应用发展。目前中小功率的光伏发电升压电路主要采用BOOST电路或者在逆变桥后用工频变压器升压的结构,由于Boost电路不能实现输入输出之间的隔离,而工频变压器存在着体积大、效率低、成本高的问题。本文在光伏发电系统的升压变换器采用了推挽正激变换器,使用PIC16F74与逻辑门电路实现了带有MPPT功能的升压电源研制,在不提高控制器成本的情况下,既实现了输入输出的隔离,又提高了变换器的效率。在最大功率跟踪算法上提出了扰动因子,利用改进的变步长扰动观察法对传统的MPPT算法进行了优化。
1 光伏电池的特性及改进的变步长扰动观察法
1.1 光伏电池的特性
在光照强度和环境温度一定时,太阳能光伏电池既不是恒压源,也不是恒流源,是非线性直流电源。其等效电路如图1,等效数学模型为:

式中,I为光伏电池输出电流;U 为光伏电池输出电压;I0为PN结的反相饱和电流;Iph为光生电流;q为电子电荷,q=1.6×10-19C;k为波尔兹曼常数,k=1.38×10-23J/K;T 为热力学温度;n为PN结的曲线常数;Rs、Rsh为光伏电池的固有电阻。

图1 光伏电池的等效模型
1.2 最大功率点算法的原理
光伏电池是一个非线性电源,其输出电压和电流不仅受光强及温度的影响,而且也由负载的性质和状况决定。在光伏电池的伏安曲线中,光伏电池的输出特性曲线与负载特性曲线的交点即为光伏电池的工作点。如果工作点处于最大功率点处,系统就处于匹配状态,光伏电池所产生的电能被充分利用。反之,它所产生的电能就没有被充分利用。在光伏电池的伏安曲线上,在最大功率点作切线,该切线的斜率就是光伏电池在最大功率点处的动态等效电阻。在光伏电池和负载之间配置一个功率变换器,通过调节输入输出电压比调节负载的等效阻抗,来调节光伏电池的等效负载,从而实现MPPT的跟踪。
1.3 变步长扰动观察法的工作原理
扰动观察法是MPPT控制中的一种常用方法,它的控制思路是:假设增加MPPT电路开关的占空比,若太阳能电池的输出功率增加,则占空比继续增加,直到输出功率下降;反之,占空比减少[1]。占空比每次的改变值称为扰动步长△d,在传统的扰动观察法中,△d为定值。当△d较大时,光伏发电系统对环境的变化比较敏感,但是在MPP附近会有较大的震荡;当△d较小时,系统在MPP附近的震荡会很小,但是对环境的适应能力比较差[4]。
本文采用变步长的扰动观察法实现最大功率跟踪。系统开机时,首先采样当前光伏电池的开路电压值,同时启动定时器,在设置的定时时间内,系统以开路电压的0.76倍作为初始基准值。在定时器中断响应时,系统启动变步长扰动观察法控制。本设计中的扰动步长取决于当前的功率值与前一次功率值的差△P,△d=a△P,其中a为扰动因子,是一个正的常数,可见△P越大,扰动就越大,△P越小,扰动也越小。为了增强系统的稳定性,设置了步长△d的两个阀值,当△d<△dmin时,△d=0,系统不做扰动;当△d>△dmax时,△d=△dmax,避免了步长过长或系统错误引起的巨大震荡。这种算法的优点是:在开机时可以迅速追踪到当前的最大功率,加快了系统的启动速度,定时器的设置使得系统在开机时稳定运行;当光伏系统所在的外界环境发生迅速的变化时,系统可以以比较大的步长追踪MPP,改善了传统扰动观察法的动态性能;当系统工作在 MPP附近时,由于△P很小,系统以小步长追踪MPP,减小了系统在MPP附近的震荡。系统的流程图如图2、图3所示。
2 推挽正激升压电源主要参数的设计
推挽正激变换器的拓扑如图4所示,本设计输入电压为光伏电池输出电压Uin=50 V~80 V,输出电压Uout=400 V,变换器的额定功率为200 W,工作频率为50 k Hz。
2.1 推挽正激变压器的设计
2.1.1 铁芯型号的选取
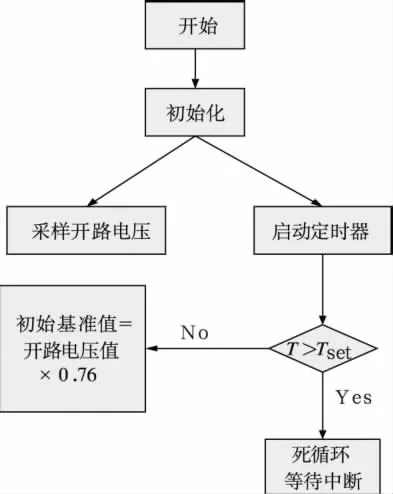
图2 MPPT主程序流程图

图3 MPPT中断程序流程图

图4 推挽正激变换器的结构图
高频变压器的磁芯材料有铁氧体、非晶态合金、坡莫合金和超微晶软磁合金几种,其中铁氧体的磁芯结构齐全,价格便宜,使用广泛:电阻率大,高频时可以减小能量损耗,防止变压器发热。本文中变压器采用PC40铁氧体,其饱和磁通0.45 T(60℃),最大工作磁通选取为0.1 T,剩余磁通 Br=0.065 T,矫顽力 Hc=10.3 A/m,居里温度Tc>215℃。为了防止高频变压器的瞬间饱和,应该选择较低的工作磁感应强度。因为Br总是远小于Bs,选择工作磁感应强度应小于1/3Bs,本文中设计的变压器工作磁感应强度为Bm=0.1 T。
2.1.2 期望匝数比的设计[3]

2.1.3 变压器磁芯结构的选择

选择磁芯结构为EI40。
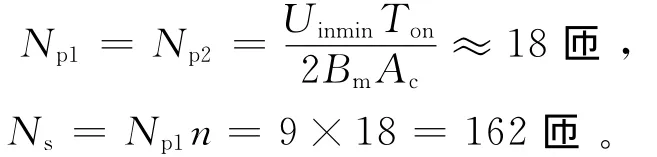
2.1.4 线圈匝数设计
初级线圈匝数分别为Np1,Np2,次级线圈匝数Ns
2.2 控制电路的设计
由于推挽正激电路需要两路占空比相同的脉冲来驱动,脉冲的宽度由MPPT算法实时更新,需要大量的单片机资源。本设计中使用比较器、逻辑门电路与PIC16F74共同实现对推挽正激变换器的控制,大大减少了单片机资源的使用。图5所示为方波发生电路。L M239系列可用于几兆赫频率的振荡电路。该电路为使用很少元件构成的方波发生电路。电路的输出频率由R4、C1的时间常数以及由R1、R2、R3所决定的迟滞电路共同决定。电路中,R1=R2=R3=120 kΩ,R4、R5分别为10 kΩ和500Ω的可调电阻,调节R4可以调节输出电路的频率,调节R5调节正负脉宽的宽度。本设计中输出的方波PWM1为50 k Hz,正负脉冲的占空比各为50%。单片机根据MPPT算法,输出PWM2,其频率为100 k Hz,开关管门极控制所需要的控制信号G1、G2的表达式为:
G1= PWM1 &PWM2,G2= (!PWM1)&PWM2。门极驱动信号G1、G2由PWM1、PWM2与逻辑控制芯片74 HC04与74 HC08实现。
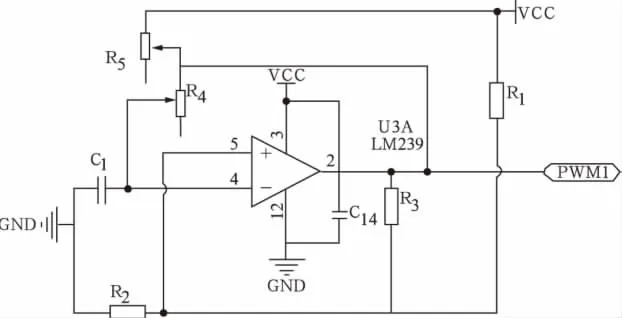
图5 50 k Hz方波发生器
2.3 反馈回路的设计
模拟信号隔离的一个比较好的选择是使用线性光耦。线性光耦的隔离原理与普通光耦没有差别,只是将普通光耦的单发单收模式稍加改变,增加一个用于反馈的光接受电路。这样,虽然两个光接受电路都是非线性的,但两个光接受电路的非线性特性都是一样的,这样,就可以通过反馈通路的非线性来抵消直流通路的非线性,从而达到实现线性隔离的目的[5]。本文采用HCNR201进行模拟信号的隔离,图6为反馈隔离电路。
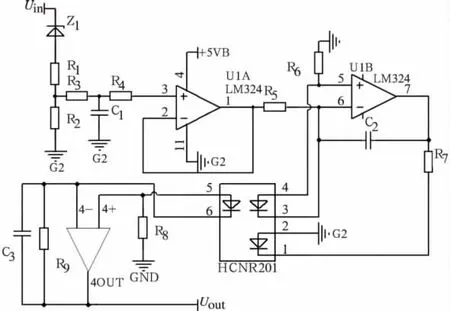
图6 线性光耦反馈电路
3 实验结果
实验中,开路电压为80 V,短路电流4 A的光伏电池接在推挽正激变换器的输入端,功率滑动变阻器接在推挽正激变换器的输出端。完成了一台200 W的推挽正激升压电源,推挽正激的主开关管选取仙童公司的FDP51N25,其耐压为250 V,电流为51 A,导通电阻为0.06Ω;整流二极管选择仙童公司的RHRP15120快恢复二极管,其耐压为1 200 V,电流为15 A。图7中波形分别为单片机输出的PWM2与L M239输出的PWM1,图8中的波形分别为开关管门极驱动信号G1、G2。

图7 单片机与L M239输出的PWM波形
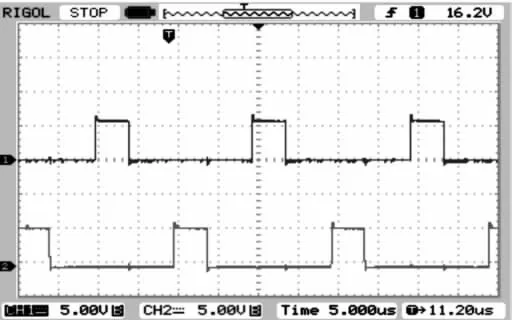
图8 开关管门极驱动信号
4 结 语
本文研发了一款用于中小功率光伏发电系统的推挽正激升压电源。实验表明:所研究的升压电源达到了结构简单稳定性高的设计要求,克服了传统升压电源的不隔离及体积大效率低的缺点。改进的变步长干扰观察法可以使系统在外界环境发生迅速变化时,以比较大的步长追踪MPP,改善了传统扰动观察法的动态性能;当工作在MPP附近时,以小步长追踪MPP,减小了系统在MPP附近的震荡。
[1] 朱铭炼,李臣松,等.一种应用于光伏系统MPPT的变步长扰动观察法[J].电力电子技术,2010,44(1);20-23.
[2] Fanghua Zhang,Haihong Qin,Huizhen Wang,Yangguang Yan.Freewheeling Current in Push-Pull For war d Converter[C].IEEE 2003:353-358.
[3] 周 廷.PWM光伏逆变电源DC-DC电路及最大功率点跟踪技术的研究[D].山东大学,2006.
[4] WenJung Chiang,Hur ngliahng Jou,Jinn Chang Wu.Maxi mu m Power Point Tracking Method for t he Voltage-mode Grid-connected Inverter of Photovoltaic Generation System[C].IEEE International Conf.on Sustainable Energy Technologies.2008:24-27.
[5] 苏 涛,咎小舒,周立新.模拟光耦器件 HCNR201及其在高精度电压检测中的应用[J].电测与仪表,41(463):54-56.