基于Roberts边缘检测的面向对象建筑物信息提取
2012-09-22赵月云王波
赵月云,王波
(徐州市市政设计院有限公司,江苏徐州 221002)
1 引言
“数字城市”建设随着我国城市化进程的加快越来越受到人们的重视,城市基础建设的更新速度也较先前有了很大的提高。高分辨率遥感影像可以为城市提供较为丰富、细致的数据,它为“数字城市”信息数据库的更新提供了依据[1]。高分辨率遥感影像城市信息数据中绝大多数是包括建筑物在内的人工地物。建筑物的提取成为“数字城市”建设不可或缺的关键部分,是“数字城市”建设的基础环节。近年来提出的基于面向对象的方法提取建筑物,它首先将影像分割成由同质像元组成的影像对象,利用对象的光谱特征及空间特征进行分类提取,这种方法有效解决了基于像元提取方法的不足[2]。面向对象信息提取的第一步是多尺度分割,它也是面向对象信息提取的关键技术之一。由分割所得到的对象直接决定了分类提取的精度,而分割尺度又对影像对象的大小和数量起着决定性的作用,所以要慎重选择分割尺度。选择分割尺度的过程繁琐而复杂,在分割遥感影像过程中往往通过工作者主观判断与观察来确定最优分割尺度,主观性较强[3]。
为了解决面向对象提取过程中确定最优分割尺度的问题,本文提出了一种基于Roberts边缘检测的分割尺度估算方法。首先,通过Roberts边缘检测确定分割尺度的估值;然后,在估值的基础上选择临近分割尺度进行分割实验,选取分割效果最好的值作为最优分割尺度;最后,根据分割得到的影像对象选取建筑物的特征组合成知识体系进行分类提取。
2 Roberts尺度参数计算模型
2.1 分割尺度
尺度参数的设置在多尺度分割过程中非常关键,也是基础性步骤。尺度参数决定了影像对象能够允许异质度的最大值。将尺度参数值固定后,异质性大的影像数据分割后相对均质的数目比影像对象的数目少[4]。尺度参数的均质度亦被用作最小异质度,有颜色、光滑度和紧致度作为其内部计算的标准[5]。
为了创建有意义的影像对象,多数情况下最重要的计算标准是颜色标准。它通过形状标准的修改被间接地定义,即通过对形状标准值进行降低,从而定义光谱值在影像层中对整体均质的贡献比例。形状均质标准与颜色标准互补。形状标准的值间接定义了颜色标准,形状标准≤0.9。
形状标准由光滑度与紧致度两个参数组成。光滑度标准的作用是将影像对象的边界光滑度进行优化,在数据异质性较高的情况下可防止对象边缘的破碎,并且生成非紧致的对象。紧致度标准的作用是将影像对象的紧致度进行优化,当影像数据光谱反差较弱并且需要将紧致对象与非紧致对象分开时,需使用紧致度标准。光滑度标准与紧致度标准并不冲突,在具体应用中可选择恰当的标准,例如有光滑边界的影像对象需要用紧致度优化等。
2.2 Roberts算法描述
多尺度分割采用的是一种基于区域合并的分割方式,分割结果表现在不同的层面上,这些层面的信息由选择的尺度参数所决定,但在原始的遥感影像中对地物形状的观察并不适合,而地物的空间信息在边缘检测所得到的影像结果中同样可以体现出来,同时生成了每个地物对象的多边形边界,因此分割尺度的确定可以借助Roberts边缘检测所生成多边形的异质性特征。
Roberts边缘检测算子[6]为:

它是下面两个模板(2×2)作用的结果:

影像对象的边缘可以通过提取模板对它的处理得到。选取边缘影像中要分割的地物对象的代表,利用异质性计算公式得到f的值,从而大致确定分割尺度。
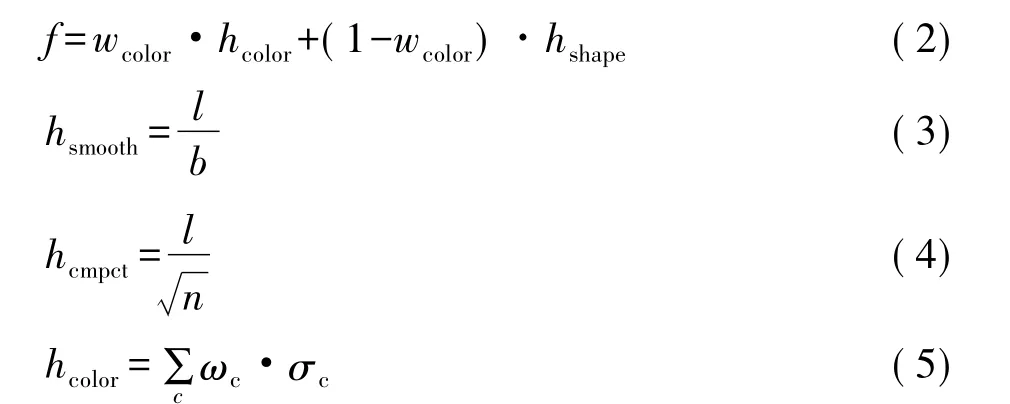
式中,wcolor为光谱信息权重,取值范围[0,1];(1-wcolor)为形状信息权重,取值范围[0,1];hcolor与 hshape分别为光谱与形状异质性的值;hsmooth为光滑度,等于多边形周长l与最小外接矩形周长b的比值;hcmpct为紧致度,n为影像内像元的总个数;C为具体波段,ωc为各波段的权重;σc为C波段的光谱标准差。
3 实验
3.1 特征分析
本实验选取了东港市高分辨率遥感影像数据,影像的分辨率为 0.5 m,由红、绿、蓝三个波段组成。如图1所示。通过观察可以看出建筑物在本实验区内的若干特征:①影像中基本上以建筑物屋顶的形式表现出建筑物轮廓;②建筑物方向以左右方向为主;③建筑物屋顶颜色以白色为主;④建筑物多为长方形,长宽比相对较大;⑤建筑物的楼层较高,阴影较多;⑥建筑物背景多以灰色路面与黑色阴影为主。

图1 东港市某地区高分辨率遥感影像图
充分了解了实验区内建筑物的特征,依据上述特征组合建筑物分类提取的知识体系,进行建筑物的提取。
3.2 影像分割
遥感影像经过Roberts边缘检测得到了如图2所示的边缘影像,选取可作为分割尺度估算的样本对象。

图2 经过Roberts边缘检测得到的边缘影像及样本
利用样本对象估算分割参数,设置光谱因子的值为 0.9,分割尺度 f=0.9·hcolor+(1-0.9)·hshape,此时形状因子为0.1,它的影响可忽略不计,则分割尺度f=0.9×48.06=43.254,经过计算得到分割尺度的估值为43,对影像利用分割尺度为43进行分割的效果如图3所示。

图3 尺度为43的分割结果
从图3显示的分割结果证明了该方法的可行性:能够依据提取的边缘影像,充分利用光谱信息与空间信息;能够快速地估计边缘提取结果中感兴趣地物的分割尺度;能够指导并且定量描述多尺度分割尺度设置,极大地减小的尺度设置的盲目性。但是这种方法也有一些缺陷:只对边缘完整、形状明显的地物适用;边缘影像中地物对象的选取具有很大的主观性,这将直接影响分割尺度的估值;某些地物的边缘利用Roberts边缘检测不能很好地提取,从而也不能进行有效的分析;计算得到的分割尺度只具有估值的意义,并不精确,需要在此估值的基础上选取不同的分割尺度进行实验比较,人工选取分割效果最佳的尺度参数作为精确值。
在分割尺度为43的基础上,作者分别选取了30、40、50、60、70五个尺度参数进行了分割实验。通过对比五个不同尺度下的分割效果,当分割尺度为50时,如图4所示,此时建筑物的分割效果较理想,建筑物大多能够以一个或几个多边形表示,与周围的背景区分较好且独立性较好。

图4 尺度为50的分割结果
3.3 分类提取
影像分割后的基本单元是多边形对象,这些对象都是由同质像元组成的。每个多边形对象都具有光谱特征、纹理特征、形状特征及上下文关系。基于面向对象提取的方法中所选用对象的特征越接近实际地物的真实描述,分类的精度就越高,选用的目标对象特征要尽量地综合描述在不同角度下区别于其他对象的特征。
将要分类的影像对象通过分割已经得到,接着就要选取建筑物的特征组合成知识体系进行分类提取。本实验影像的光谱与空间信息都比较丰富,这对信息提取的特征选择非常有利。本实验区中的建筑物与周围背景的光谱信息有较为明显的差别,但仅仅使用光谱信息提取精度得不到保障。实验中选用亮度、长度、紧致度、矩形特征、主方向进行特征参数的设置,如表1所示。

具体的特征参数设置 表1
本实验区的建筑物通过屋顶表现出来,相对于街道、阴影、地面等背景其亮度较大;建筑物呈长条状,长度特征比周围零散的噪声地物相对较长;影像中建筑物的紧致度也在一定的变化范围内,可作为区分其他地物特征;建筑物的矩形特征较明显,可以通过寻找与矩形特征相似度较高的影像对象确定建筑物;建筑物的主方向基本为左右稍斜方向,有一个基本的变动范围。通过分割得到的对象、特征参数设置,就可以分类提取出如图5所示的建筑物信息。

图5 建筑物提取结果
3.4 实验结果分析与评价
为了更好、更直观地对建筑物提取结果进行评价分析,现将上面建筑物提取的结果与原始实验图像相叠加,效果如图6所示。

图6 建筑物提取结果附着在原图上
从图中的叠加结果可以看出提取出的建筑物信息与原始影像上的建筑物重叠在一起,对原始建筑物位置、方向、形状等表示精度较高,虽然存在如左上角建筑物受到阴影遮蔽的影响未能完整提取出来的情况,但提取出的部分与原始图像中的位置、大小、形状基本吻合,提取精度较高,提取出的建筑物信息具有很好的独立性、真实性、完整性、类别一致性。
4 结论
本文提出了一种基于Roberts边缘检测的分割尺度估算方法应用在面向对象的建筑物提取中。这种方法实现过程简单,利用Roberts边缘检测得到边缘影像并选取样本,计算出分割尺度参数估值,最后人工确定最优分割尺度,有效地解决了分割尺度参数确定的盲目性和主观性,从而大大提高了建筑物提取的效率。
[1]汪祖进,王丹.关于数字城市规划建设的几点认识[J].中国测绘,2002,3(1):32 ~36
[2]薄树奎,聂荣,丁琳.基于面向对象方法的遥感影像桥梁提取[J].计算机工程与应用,2008,44(26):200~202
[3]韩鹏,龚健雅.遥感尺度选择问题研究进展[J].遥感信息,2008,10(1):96 ~99
[4]周春艳.面向对象的高分辨率遥感影像信息提取技术[D].青岛:山东科技大学,2006
[5]付卓,胡吉平,谭衢霖等.遥感应用分析中影像分割方法[J].遥感技术与应用,2006,21(5):456 ~462
[6]高勇钢.一种改进Roberts算子边缘检测[J].巢湖学院学报,2009,11(6):31 ~33
