单相整流/逆变H桥剖析及仿真研究
2012-09-22陈贤明吕宏水刘国华
陈贤明,吕宏水,刘国华
(国网电力科学研究院,江苏南京210003)
1 前言
近年来,由于二氧化碳等温室气体的排放,导致世界气候日益恶化,节能减排已是迫在眉睫的要务。除了工业中大量消耗电能外,各种家用电器,也大量消耗电能,也有着节能的潜力。通常家用电器都是使用单相电源,为节电家用电冰箱、空调等己多采用变频技术,因此单相整流器和单相逆变器有着广泛的用途。过去整流和逆变常用半控的晶闸管器件装置,它们往往会带来功率因数变差和电流波形畸变的电网污染等问题。近年来采用导通、关断可控的全控型电力电子器件(以后简称T管),如IGBT及脉宽调制PWM的方法,整流时,可得到功率因数校正(Power Factor Correction,PFC)的效果,即网侧功率因数接近1,电流波形接近正弦;逆变時,负荷侧电流正弦,如负荷侧并网,功率因数接近1。
为此,本文针对整流和逆变的能量双向流动单相H型桥进行了PWM控制原理的研究,比较了单、双极性调制的优缺点。H桥工作在整流时,要求实现功率因数校正PFC功能,工作在逆变时,要输出电流正弦、(并网)功率因数接近1,这是比较理想的。在上述研究的基础上,对H桥在整流和逆变下的PWM用单周控制(One Cycle Control,OCC)进行了仿真,证明了在单极性PWM下H桥的两只上臂(或下臂)用T管,如IGBT等,另两只有可能用半控型开关元件,如晶闸管,就可满足上述要求,从而减少开关损耗、降低成本。
2 单相整流/逆变H桥机理研究
图1所示表示了单相整流/逆变H桥,它由上、下 各两臂T管T1-T4、二极管(D1-D4),电感L和单相交流电源u及直流侧电容器C组成。逆变时PWM可分为两大类,即单极性PWM和双极性PWM。

图1 单相整流/逆变H型桥
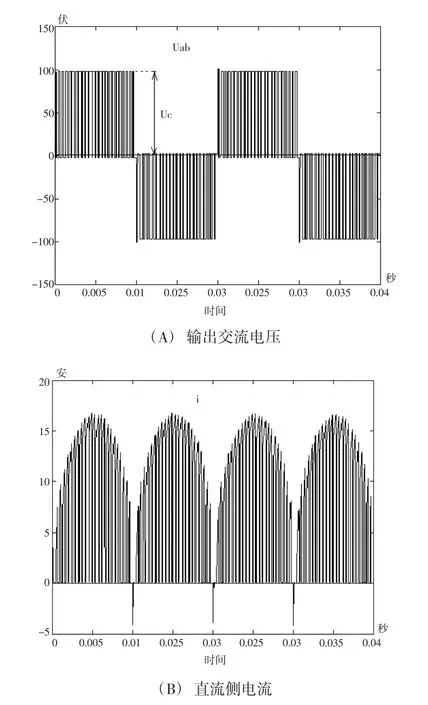
图2 H桥单极性PWM逆变输出交流电压(A)和直流侧电流(B)典型波形
2.1 单极性PWM逆变控制
图2所示为H桥单极PWM逆变典型输出交流电压,和直流侧电流的波形。
分析单相H桥的单极性PWM工作情况。交流电压u在正半波情况下与直流侧电容电压Uc有如图3所示的一般关系。

图3交流正半波u和Uc
图3分成三个时区,其中a、c时区u小于电容器电压Uc为逆变区,而在b时区u大于电容器电压Uc为整流区,现进行如下分析。
(1)a、c时区 u<Uc逆变
① 当无驱动信号 T1、T2、T3、T4,不通。
因 Uc>u,D1-D4也不通。H桥不工作,C不放电。
② 当 T2、T3,不通。
当T1作PWM控制,T4导通;
或当T4作PWM控制,T1导通,分别如图4的A、B部分所示。
电容器C放电路径:C+→T1→L→u+,u→T4→C-反向放电到u,从电容器C看放电路径,组成了dc-dc Buck电路[3],如图4所示。应指出在PWM控制下电容器C是断续放电的,上述两类PWM控制是完全等效的,注意在T1、T4的PWM关断时,加于u端的电压是0(正向单极性)。
③ 当 T1,T4,不通。
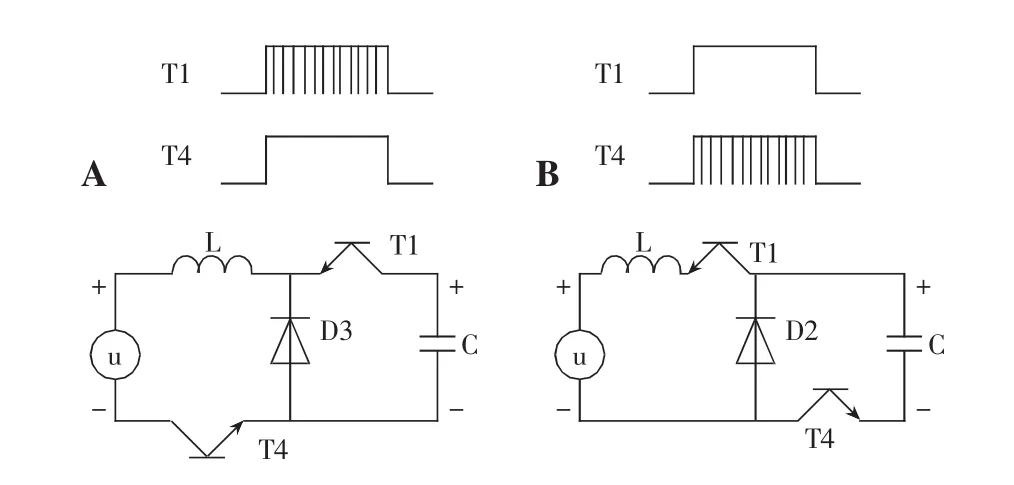
图4 T1或T4作PWM控制下电容器C放电的Buck电路
当T2导通,T3作PWM控制;
或当T3导通,T2作PWM控制。分别如图5的A、B部分所示。
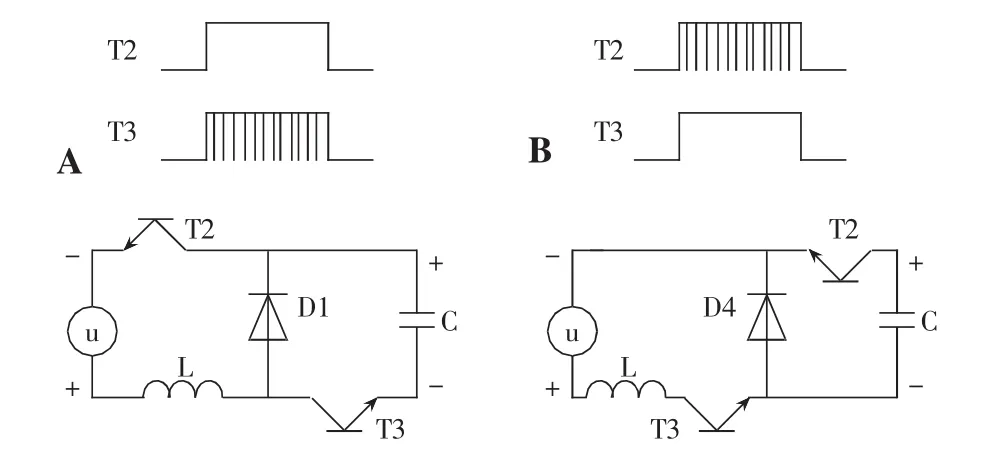
图5 T2或T3作PWM控制下电容器C放电的Buck电路
电容器 C 放电路径:C+→T2→u-,u+→L→T3→C-正向放电到u,从电容器C看,放电路径组成了dc-dc Buck电路,如图5所示,应指出在PWM控制下电容器C是断续放电的上述两类PWM控制是完全等效的,注意在T3,T2的PWM关断时,加于u端的电压是0(负向单极性)。
(2)b时区 u>Uc整流
① 当无驱动信号,T1、T2、T3、T4,不通。
因u>Uc,D1、D4自然导通。交流电源u向C充电,路径为:u+→L→D1→C→D4→u-
② 因D1、D4导通,T1、T4不可能导通
当T3作PWM控制,T2不导通;
或当T2作PWM控制,T3不导通。分别如图6的A、B部分所示。
用PWM来控制电容器C的断续充电。T2或T3作PWM导通时,加于C的电压为零。
从交流电源向电容器C看,充电路径组成了dc-dc Boost电路,如图6所示。应指出在PWM控制下电容器C是断续充电的,图6A,6B两类PWM控制是完全等效的。
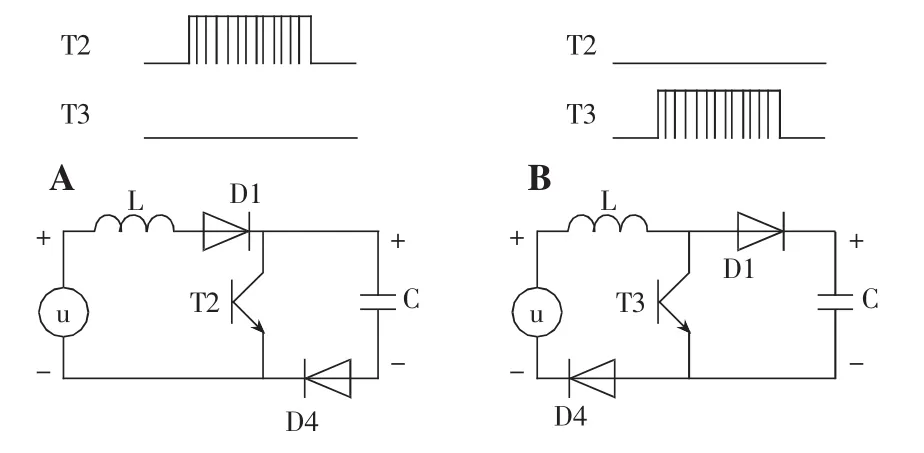
图6 T2,或T3作PWM控制电容器C充电的Boost电路
实际上为保证H桥逆变工作正常,图1中的电容器C的电压Uc必须始终大于电网电压u的幅值,亦即图3中的b时区不存在,但在H桥整流工作时,如Boost电路中的升压电感L=0,则电容器C的充电电压Uc的最大值是电网电压u的幅值,当L不为零组成Boost电路,Uc的最大值将超过该值,并取决于L的大小和PWM控制中的开关周期中的导通时间的占空比。
在交流电压u负半波情况下,H桥工作在逆变时,图4、图5仍适用。有关结论仍正确。则在整流情况下,当电网电压u的幅值
当 T1、T2、T3、T4,不通。D2、D3 自然导通交流电源对C充电路径:u+→D2→C+→C→D3→L→u-。
因D2、D3导通 ,T2、T3不可能导通。
当T4作PWM控制,T1不导通;
或当T1作PWM控制,T4不导通,分别如图7的A、B部分所示。
用PWM来控制电容器C的断续充电。从交流电源向电容器C看,充电路径组成了dc-dc Boost电路,如图7所示。应指出在PWM控制下电容器C是断续充电的,上述两类PWM控制是完全等效的图4至图7中的两类PWM和dc-dc转换电路(A),(B)都是等效的,在其中每个图任选一种结构,便可以完成H桥的逆变和整流运行。例如在图4-7 中可分别选 T1、T2、T2、T1 作 PWM 控制。或T4、T3、T3、T4 作 PWM 控制。

图7 T1,或T4作PWM控制下电容器C充电的Boost电路
由此看出用H桥完成单相整流和逆变双向运行的情况,用单极性PWM时,只要上臂或下臂两只开关元件作PWM控制,同时另外两只元件在逆变下轮流保持导通,或整流下保持断开。由此可推断它们可能用半控开关元件、晶闸管代替。有利于降低成本和开关损耗。
2.2 双极性PWM逆变控制
图8所示为单相H桥双极性PWM逆变输出交流电压,和直流侧电流的典型波形。现在来分析单相H桥的双极性PWM逆变工作情况。假定直流侧电容器C电压Uc大于交流电源u,如图3上的a,c时区,D1-D4不导通。

图8 H桥逆变双极性PWM输出交流电压(A)和直流侧电流(B)典型波形
当 T1,T4 同时作 PWM 导通,T2,T3 关断,电容器 C 沿图 9A路径:C+→T1→L→u+,u→T4→C-放电。加于交流侧的为+Uc,当T1,T4同时关断时,由于电感L的电流不能立即为零,这时迫使电流走图 9B 的路径:u→D2→C+→C-→D3→L→u+流入电容器的电流反向,向电容器充电,所以造成双极型PWM时,直流侧电流为双向,并且可看出这时加于交流侧的为-Uc,这就是构成图8波形的原因。
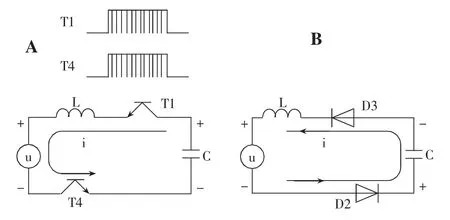
图9 双极型PWM控制下,T1,T4导通时,电流途径
当 T2、T3 同时作 PWM 导通,T1,T4 关断,则电容器 C沿图 10A 路径:C+→T2→u-,u+→L→T3→C-放电。加于交流侧的为-Uc,当T2,T3同时关断时,由于电感L的电流不能立即为零,这时迫使电流走图10B的路径:u+→L→D1→C+→C-→D4→u-使电容器C充电,可以看出流入电容器C的电流是双向的。而这时加于交流电源侧的为+Uc。
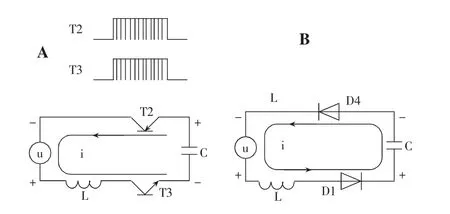
图10 双极型PWM控制下,T1,T4导通时,电流途径
图8 A为逆变器50Hz的一个周波交流电压波形,图8B为对应二个周波的直流测电容器电流。为清楚起见,图 11 将图 8 的 t=0.005″和 t=0.015″处的波形展开,可知当 t=0.005″时对应着工频 50Hz交流电压的正幅值,而T=0.015″时对应着负幅值。

图 11 图 8 波形在 t=0.005”和 t=0.015”处的展开
从图11可看出,二种情况下直流电流i虽双向变化,其平均显然为正。而交流电压u虽正、负向变化,但左图平均值为正,右图平均值为负是很明显的。
3 H桥单极性和双极性PWM逆变控制的比较
(1)对整流情况只有单极性PWM。能用于控制实现负载功率因数校正(PFC)。
(2)对逆变而言可以用单极性或双极性PWM来调制。
对双极性言H桥上、下四臂全控型元件T1-T4不能少,并且两两轮流作PWM控制,其驱动电路和驱动信号波形如图12所示,T1、T4共用同一驱动信号,T2、T3共用另一组驱动信号。
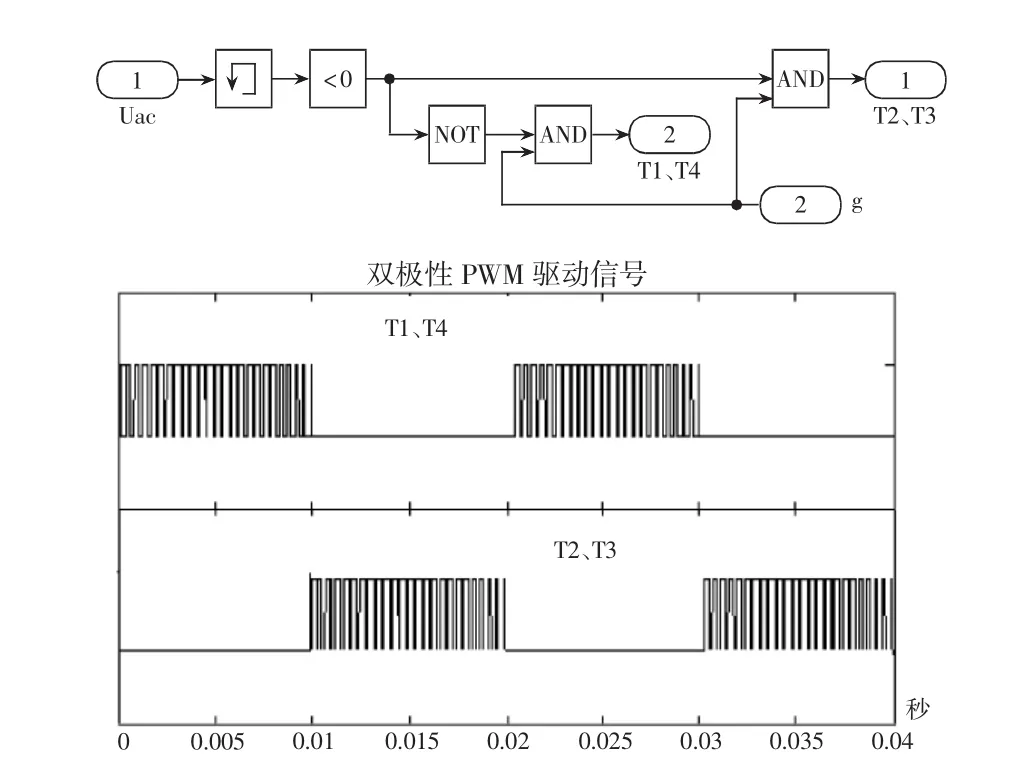
图12 双极性PWM的驱动电路和波形
对单极性言,可只对上臂(或下臂)的全控型元件T1,T2(或T3,T4)作PWM控制,对余下的 T管只要求保持导通,其驱动电路和驱动信号波形如图13所示。
(3)单极性PWM下工作时T管的开关损耗,应不大于双极性PWM工作时。
(4)双极性PWM控制用T管的di/dt和du/dt的要求,比单极性PWM控制的高。
(5)两种情况下,逆变器输出电压基本相同。
初步结论:在单相H桥的整流和逆变工况下,单极性PWM控制优于双极性PWM控制。
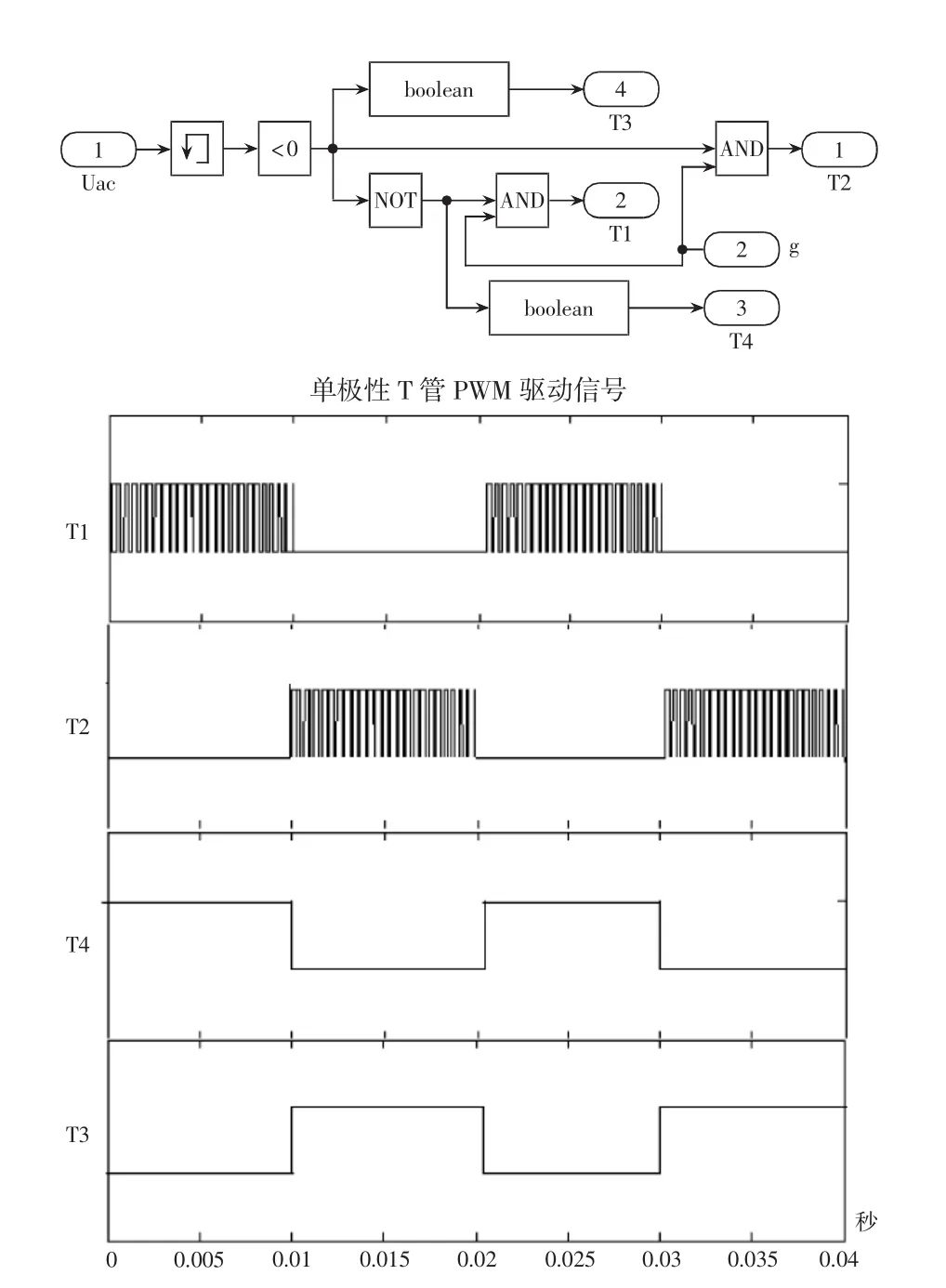
图13 单极性PWM的驱动电路和波形
4 单周控制原理[4]
恒频PWM开关单周控制(OCC)原理。
恒频PWM开关单周控制Buck电路原理如图14所示,假定开关SW以开关频率fs=1/Ts,开关函数
k(t)工作,式中Ton为每开关周期的导通时间,Ts为开关周期,占空比d是开关导通时间和开关周期的比,d=Ton/Ts,它是由图14上的参考信号Vref调制。由此可看出开关SW的输入量x(t)和输出量 y(t)的关系为:

开关SW一旦由时钟脉冲clock通过RS触发器Q端接通,积分器也开始工作,当积分值Vint大于比较器另一输入Vref,RS触发器复位,其Q端输出变为“0”,开关 SW关断,Q 端变“1”,积分器复位,一个开关周期结束,直到下一个时钟脉冲来到。假设开关频率远大于输入信号x(t)频率,可认为在一个开关周期内 x(t)为常数,则 y(t)的平均值为:

单周控制的本质是通过控制占空比d(t),使得x(t)在每周期的导通时间Ton内的积分等于参考量Uref。
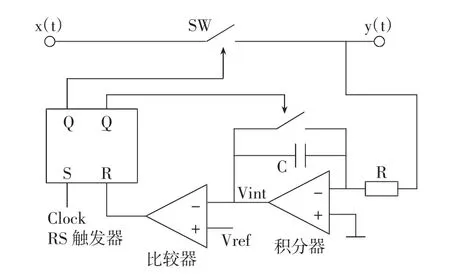
图14 恒频PWM开关单周控制Buck电路原理图
5 单周控制单相H桥PWM控制的Matlab/Simulink 仿真[5-7]
为了进一步检验上述分析,采用恒频的单周控制产生T管驱动PWM信号。
5.1 逆变控制的仿真

图15单相H桥PWM逆变控制的Simulink仿真结构
图15 所示是单相H桥PWM逆变控制的Simulink仿真结构图。为简单起见,直流侧电容用直流电源,交流侧电源用电阻R代替,图中Logic Cntl模块和图12、图13上部结构相同。图16是单周控制仿真模块OCC的展开,其积分器1/S输入被控量是逆变器的输出电流I,它跟踪正弦电压参考值Vref,注意这里积分值和参考值均采用绝对值,是因为比较器Compa只能作单方向比较。当积分值大于参考值,比较器输出翻转,复位RS触发器,其 Q 端变“0”,关断 T管,而其 Q 端由“0”变“1”,通过switch将积分值清零,直到下一时钟信号clk来到,重新接通T管,实现下一开关周期控制。
仿真实例参数:
直流侧(电容器侧)电源电压为100Vdc;
电感器L=3mH;负荷电阻R=5Ω;
OCC 的时钟 clk=2400;参考值 Ref=0.005;
Sine发生器 Sinωt,ω=100π。
图2和图8分别为上例参数下的单极性(用图13驱动)、双极性(用图12驱动)PWM逆变控制的仿真结果。

图16 OCC模块的展开
图17所示为单极性(A)、(C)和双极性(B)、(D)PWM逆变控制下的交流电压、电流和电感器电压UL波形。

图 17 单极性(A)、(C)和双极性(B)、(D)PWM逆变控制下的波形
从交流电压、电流波形看,两者相差不大,从电流有效值看单极性为12.87A,双极性为11.16A。
5.2 整流控制仿真
整流控制输出为直流,只存在单极性的PWM控制,目的是达到功率因数校正PFC的效果,即要求整流时交流侧进线电流为正弦,功率因数接近1。
图18所示为本仿真实例的结构图,这里选用了上臂的T1、T2管作PWM控制,省去了下臂的T3、T4 管,假定交流电源 50Hz,幅值 100Vac,电感器L=0.5mH,整流侧滤波电容C=1500微法,直流负荷R=10 ohms并带0.1H的大电感。

图18 PWM控制的单相PFC整流电路仿真结构图

图19 PWM控制的单相PFC整流电路仿真结果
图19 所示是PWM控制的单相PFC整流电路仿真结果。图19(D)为T1、T2管的驱动PWM信号,图19(A)为交流电源电压和交流电流,除仿真开始有畸变外,稳定后电流接近正弦,功率因数接近1。图19(B)的id是单相输出断续的直流电流,呈正弦半波状,i为连续的负荷电流它同样出现在图19(C)中,这里的负荷直流电压波动较大可能是与滤波电容器电容值不够大,应当指出单相二极管H桥全波整流,在交流电压幅值为100伏时直流负荷电压不会超过100伏。这里由于交流电感器L形成的Boost电路效应的升压作用超过100伏,还应指出这个电压大小还受图18中参考量Ref的调节,它相当于PWM的每个开关周期占空比的调节。
6 结论
本文对单相整流/逆变H桥在PWM控制下的工作原理进行了详细分析,并利用了Matlab/Simulink软件进行了仿真,得出了下述结果:
H桥在PWM逆变下,采用单极性调制较好,T管可有较小的开关损耗,并有可能采用两只T管,两只晶闸管,有利于降低成本。
比起单相半控或全控的晶闸管整流桥,在PWM控制下H桥能达到PFC的效果,不需补偿无功和滤波器。
利用单周控制OCC可以简化PWM控制电路,并因每个开关周期都控制,动态性能优良。
使用H桥是有缺点的,当PWM开关频率高时,开关损耗变大,不适合在大功率电器上应用,如要用到大功率电器,理想情况是T管要配用软开关的控制。
[1] 陈贤明等.单周控制的三相PWM逆变器仿真研究[J] .大功率变流技术,2009,(6):1-5.
[2] 陈贤明等.“单周控制单相静止无功发生器研究”[J] .大功率变流技术,2010,(6):8-14.
[3] 林渭勋.现代电力电子电路[M] .浙江大学出版社,2002.
[4] Smedley K M,Cuk S.“One-cycle control of switching converters”[C] .Power Electronics Specialist Conference Record of 22ed Annual IEEE,1991:888-896.
[5] 邱晓林等.基于Matlab的动态模型与系统仿真工具—Simulink 3.0/4.X[M] .西安交通大学出版社,2003.
[6] 王忠礼等.MATLAB应用技术在电气工程与自动化专业中的应用[M] .北京:清华大学出版社,2007.
[7] 吴天明,谢小竹,彭 彬.MATLAB电力系统设计与分析[M] .北京:国防工业出版社,2004.
[8] 陈贤明等.直流电动机脉宽调速的单周期控制[J] .电气传动自动化,2009,(4):12-17.
[9] 陈贤明等.中小型发电机励磁的单周期控制[J] .水电自动化与大坝监测,2009,(2):9-13.
[10] 陈贤明等.单周控制单相交流斩波调压电路[J] .电源世界,2009,(6):(28-32).
