基于GMR传感器的车载二维电子罗盘设计
2012-09-21龚天平时劭华
龚天平,时劭华
(1.东方微磁科技有限责任公司,宜昌 443003;2.杭州电子科技大学 磁电子中心)
引 言
罗盘是一种常用的导航工具,从原理上可以分为机械罗盘和电子罗盘。机械罗盘曾在人类历史上发挥了巨大作用,但是时至今日,人类已经全面迈入了电气化时代,交通工具大都是铁磁性物体,磁干扰较大,传统的机械罗盘由于无法校准环境干扰误差,在车载等领域中误差较大,实用性较差。
本文研究了一款基于GMR传感器的车载二维电子罗盘。本罗盘体积较小,精度较高,具有一定抗干扰能力。经实测,精度可达±2°;消耗电流为3mA以内;在强干扰环境下,通过校准可以保证在±3°以内,具有较高的实用价值。
1 自旋阀GMR传感器特性
本设计选用东方微磁公司自主研发的二维自旋阀GMR传感器SAS022作为电子罗盘的磁敏元件。该传感器内部封装了两个敏感轴相互垂直的自旋阀器件。自旋阀器件采用惠斯通电桥结构,由4个自旋阀电阻组成,其中两个电阻被软磁材料屏蔽,另外两个电阻可在外磁场的作用下发生变化从而使电桥失衡,形成输出。经测试,SAS022自旋阀传感器在-10~+10Oe的响应应曲线如图1所示,在-1~+1Oe的响应曲线如图2所示。
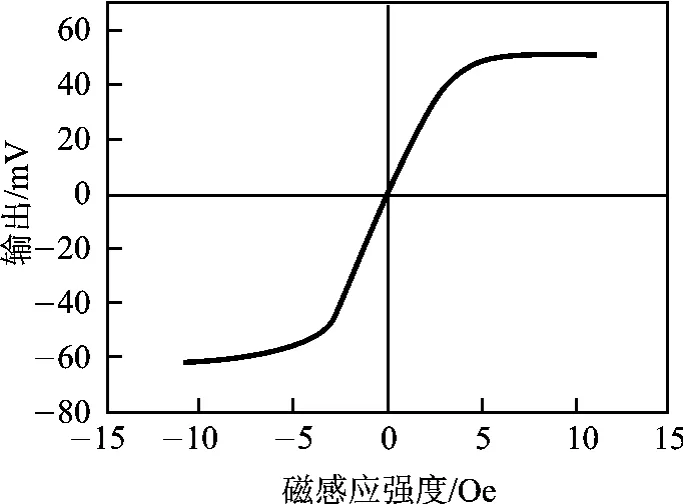
图1 SAS022在-10~+10Oe的响应曲线
在-10~+10Oe范围内,传感器的灵敏度为3.67 mV/(V·Oe),磁滞为0.3%;在-1~+1Oe范围内,传感器的灵敏度为3.67mV/(V·Oe),磁滞为0.27%,非线性度为0.37%。地磁场磁感应强度在0.6Oe内,SAS022在±1Oe内线性度较好,可满足通用电子罗盘对传感器的要求。
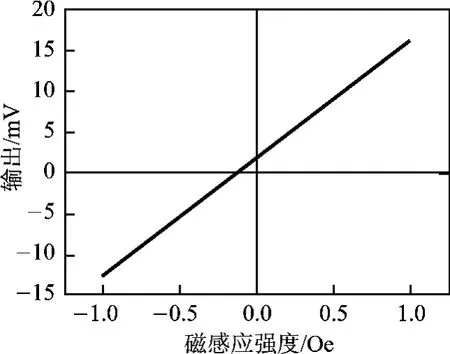
图2 SAS022在-1~+1Oe的响应曲线
2 二维电子罗盘硬件设计
二维电子罗盘硬件部分主要包括传感器部分、RC低通滤波器、信号处理部分和电源部分,电子罗盘硬件结构图如图3所示。
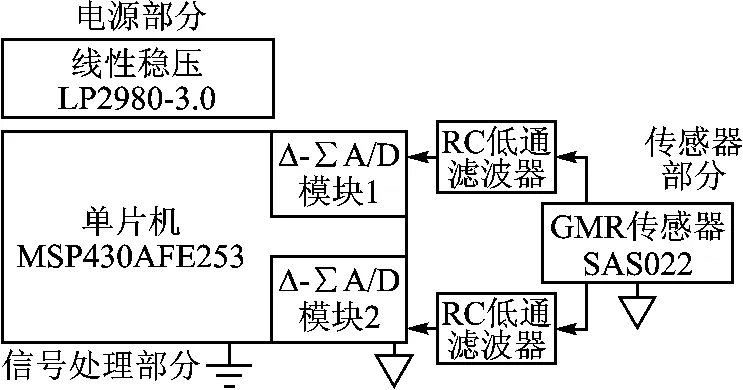
图3 电子罗盘硬件结构图
本设计使用MSP430AFE253单片机内部自带的Δ-Σ A/D进行信号放大和模/数转换。MSP430AFE253内部集成了3个独立的Δ-ΣA/D模块,保证精度的同时确保了转换速率。电源芯片使用低压差线性稳压模块LP2980-3.0,SOT-23封装,经实测罗盘电流为3mA,可满足散热要求。针对选用调理方案进行地回路隔离设计,确保精度。
2.1 信号调理电路设计
Δ-ΣA/D是模数转换器的一种,其构架决定了这种转换器非常适合于桥式传感器的信号调理,本设计采用这种调理方案。Δ-ΣA/D的结构图如图4[1]所示。
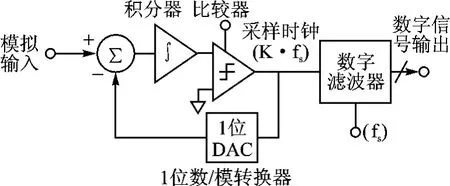
图4 Δ-ΣA/D结构图
这种构架的模/数转换器通过过采样提高分辨率。由于输入信号被高于输出转换速率K倍进行采样,信号在频域中由采样产生的F(ω)分量之间的带宽大于奈奎斯特定律要求的带宽,这样可以简化模拟输入滤波器设计,经过实验选用RC低通滤波器即可保证精度。模拟信号经过比较器后,转换为1位码流,单个1位码流没有任何意义,需要后端的数字滤波器进行加权平均和数字滤波。1位码流通过1位DAC反馈,与输入信号经过减法器输入到积分器中,再经过比较器转换成1位码流信号。
通过过采样可以提高分辨率,但是使用传统的方法需要4次过采样才能提高1位有效分辨率[2],如果要达到20位的有效分辨率,需要22×20次采样。Δ-ΣA/D内部的积分器相当于一个低通滤波器,将低频信号噪声平移到高频。假设输入信号为X、输出信号为Y,积分器响应函数为H(f)=1/f。积分器传递函数如图5所示,可以进行如下推导:
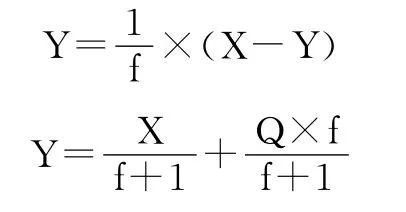
由公式可以得出,当f越接近0Hz时,Y越接近X;当f越大时,Y就越接近量化噪声[3]。
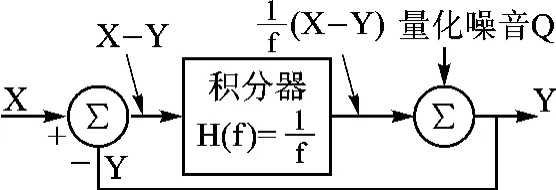
图5 积分器传递函数
MSP430AFE253内部集成的是二阶Δ-ΣA/D。阶数越多,在带宽内量化噪音越小,得到相同的分辨率就只需要较少的采样次数。阶数越高,量化噪音平移效果越好,如图6所示。
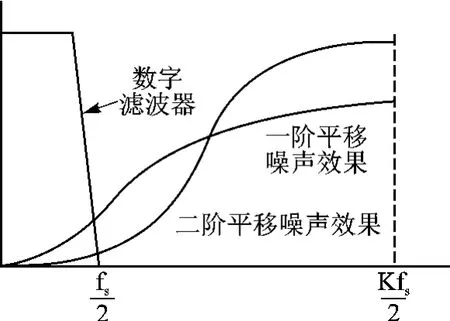
图6 阶数与量化噪音平移效果图
由于Δ-ΣA/D内部自带放大器采用开关电容实现,RC低通滤波器的时间常数会影响到A/D转换器的失调误差和线性度[4],因此要根据不同的放大倍数进行试验。MSP430AFE253内部自带最大放大32倍的PGA,本设计将其配置为32倍。电阻选用100Ω,电容选择1nF。
2.2 电源部分设计
电源芯片选用SOT-23封装的低压差线性稳压芯片LP2980-3.0,最大输入电压为16V,当输出电流在10mA以内时,最小压差可以低至100mV。实测本罗盘工作电流为3mA,假设当输入电压为16V时,为保证LP2980-3.0的散热,最大的外部环境温度为:

SOT-23封装的θJA=220 ℃/W;LP2980-3.0最大工作温度TJ(MAX)=125℃;当输入电压为16V时,最大功耗P=0.039W。由以上公式得出,SOT-23封装LP2980-3.0最高可以工作在外部123℃的环境中。
电源芯片为系统提供3V电压,将其分割为模拟电源和数字电源,对其各自所属器件单独供电。PCB布板时,将模拟地与数字地分割,使用0Ω电阻在一点连接[5],防止高频数字电流灌入模拟地[6],影响模拟器件性能。
3 测试结果分析
本罗盘在国防科技工业弱磁一级计量站进行测试,测试无干扰和有干扰情况下罗盘精度。
第一步,保证罗盘周围没有铁磁物体,测试前先发送测试指令,将罗盘旋转一周进行校准。第二步,在罗盘周围放置一块铁磁物体,罗盘不再校准测试。第三步,铁磁物体与罗盘保持相对位置不变,发送校准指令,旋转罗盘进行校准,再测试。测试结果如表1所列。
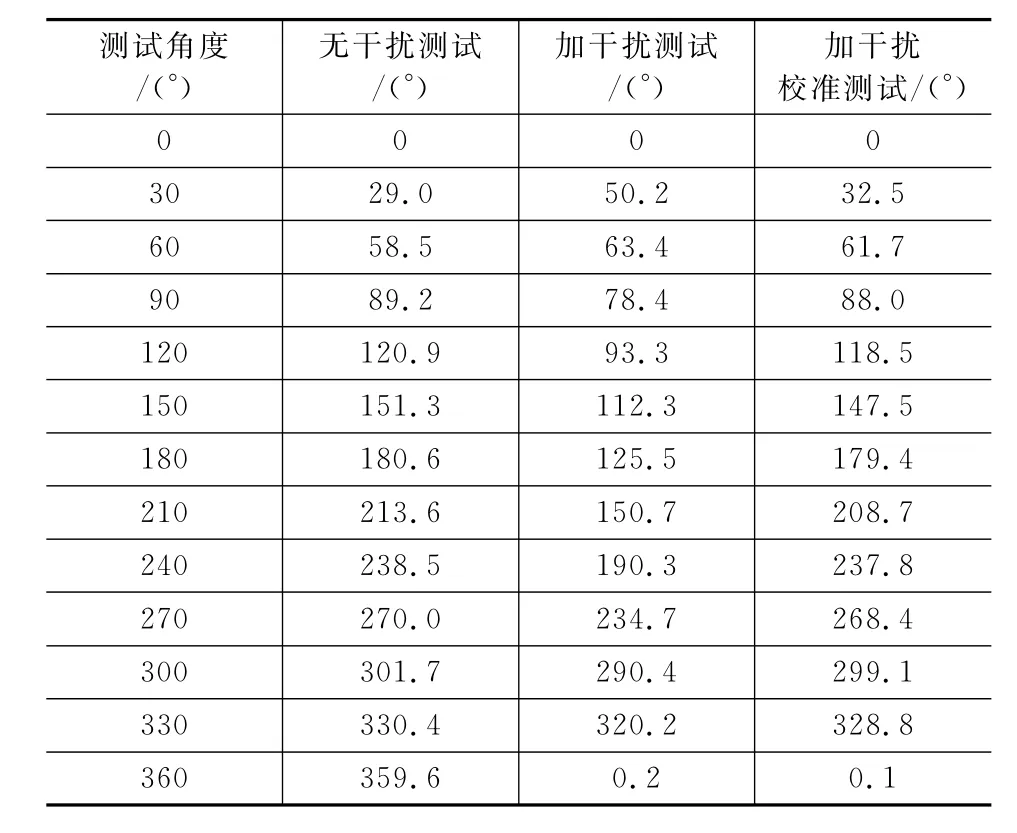
表1 测试数据
根据以上数据可以得出,在无干扰情况下精度可达+1.7°~-1.5°。当外部有较强的铁磁干扰时,电子罗盘的精度会受到很大干扰,实用价值较低。经过校准精度为+2.5°~-2.5°,具有较高的工程应用价值。
结 语
电子罗盘目前一个较为热门的应用方向是与GPS结合使用,但是功耗、价格、体积和精度等因素将制约其应用范围。针对不同的设计应将这些要点折中考虑,使其应用价值最大化[7-8]。
[1] Bonnie Baker.A Baker's Dozen:Real Analog Solutions for Digital Designers[M].Oxford:Newnes,2005.
[2] W R Bennett.Spectra of Quantized Signals[J].Bell System Technical Journal,1948(27):446-471.
[3] Walt Kester.Data Conversion Handbook[M].Oxford:Newnes,2005.
[4] Silicon Laboratories Inc.C8051F35XDelta-Sigma ADC User'S Guide,2005.
[5] Intersil Corporation.Instrumentation Amplifier Application Note,2009.
[6] 经纬,魏丽丽,王力.PCB地平面的分割[J].印制电路信息,2007(3):39-43.
[7] Li XiSheng,Kang RuiQing,Shu XiongYing.Tilt-Induced-Error Compensation for 2-Axis Magnetic Compass with 2-Axis Accelerometer[C]∥World Congress on Computer Science and Information Engineering,Los Angeles/Anaheim,2009:122-125.
[8] JianCheng Fang,HongWei Sun,Juanjuan Cao.A Novel Calibration Method of Magnetic Compass Based on Ellipsoid Fitting[J].IEEE Transactions on Instrumentation and Measurement,2011,60(6):2053-2061.
