一种用于静止式中频电源的比例谐振控制策略
2012-09-20朱俊杰马伟明聂子玲
朱俊杰, 马伟明, 聂子玲
(海军工程大学舰船综合电力技术国防科技重点实验室,湖北武汉 430033)
0 引言
在大型舰船上雷达、声纳、飞机服务系统,航空航天及通信交换机等都需要供电系统能提供大容量、高质量、高可靠性的400 Hz中频交流电源输出,并且随着大容量电力电子器件的不断涌现,静止式中频电源的发展已成为不可逆转的趋势。而衡量逆变电源性能的一个重要指标就是输出波形的质量及动静态响应性能。
目前,国内外学者对逆变器的波形控制技术进行了大量卓有成效的研究,提出了许多波形质量控制方案,主要的方案包括比例积分控制(PI控制)、无差拍控制(DB控制)、状态反馈控制、滑模变结构控制、重复控制以及比例谐振控制(PR控制)等[1-3]。PI控制概念清晰、形式简单、理论成熟,控制器的设计不过分依赖系统参数,鲁棒性强和可靠性高,得到了广泛的应用[4]。但PI控制无法实现对正弦信号的无静差跟踪,在静止式中频电源系统中,由于系统带宽较小,为了保证系统具有足够的稳定裕量,PI控制器的增益只能取很小的值,因此不能达到稳态精确度和瞬态响应要求。将参考正弦波的前馈控制与输出电压误差的PI控制结合起来,可以提高逆变器的动态响应性能,改善输出波形的质量,但是前馈控制对负载的适应性较差,当负载变化时,系统的稳态精度和瞬态响应速度就会变差,甚至不满足要求[5-7]。状态反馈控制利用任意配置闭环系统的极点来改善系统的动态性能,但在建立逆变器模型时很难将负载特性完全考虑在内。滑模变结构控制是一种非线性控制,主要特点是滑模动态对参数变动和外部扰动不敏感,但其稳态效果不佳且受采样频率影响较大[8]。重复控制基于内模原理,可以对周期性扰动负载进行补偿,获得较好的输出电压波形[9-10],但其产生的一个周期基波延迟会影响系统的动态特性,无法满足高性能静止式中频电源的动态指标要求。
DB控制属于预测控制的一种,主要用于电流环的控制,通过预测控制电流量的变化来选择逆变器的开关状态和逆变器产生的均值电压,具有快速跟踪电流、算法易于数字实现等优点[11-14],但其对系统模型及参数的准确度要求很高。PR控制器最早是根据三相系统中同步dq轴系调节器在旋转参考系中控制直流信号,能实现零稳态误差的原理推导而来,即是从同步旋转坐标中的PI控制器等效变换过来的,亦称作广义交流 PI控制器[15-16]。他可以不经过复杂的交直流变换,而是直接控制交流量,来达到消除稳态误差的目的。该控制器也可采用控制理论中的内模原理得到,通过在控制系统中引入一个正弦内模,实现对正弦信号的无静差跟踪。因此,这种控制算法响应速度快、稳态精度高的特点较为适合静止式中频电源。
本文对PR控制在静止式中频电源中的应用做了详细的分析,在此基础上,提出了一种双闭环PR控制策略,即负载电流内环和负载电压外环均采用PR控制的算法。该算法具有利用电流内环快速、及时的抗干扰性来有效的抑制负载扰动影响,精确预测外环电压且易于数字控制实现的特点,充分利用了PR控制器的特性。
1 静止式中频电源数学模型
图1为静止式中频电源拓扑结构。图中S1~S8为可关断半导体器件,C1为直流侧支撑电容,C2和LC分别为交流侧电容和电感,两个400 Hz H桥型逆变器经输出变压器T1和T2的次级串联在一起,2个H桥型逆变器之间采用交错控制技术,单个逆变器内部同时采用倍频PWM控制方法,从而达到4倍频工作的效果,形成相电压波形5电平输出,降低输出电压的谐波含量。

图1 静止式中频电源拓扑结构Fig.1 The topological structure of static medium frequency inversion power supply
对于静止式中频电源而言,逆变部分可等效于比例环节,因此建立精确的变压器等效模型显得尤为重要。图2为变压器等效电路模型。R1、L1为一次侧绕组漏阻抗,R2、L2为二次侧绕组漏阻抗,LM、RM为励磁阻抗,C为滤波电容,R0为负载电阻,U1为一次侧电压,UC为电容端电压。由于变压器T1和T2完全相同而且为级联关系,并将象征励磁电流的并联支路从T型电路中间移至二次侧,等效为Γ型悬臂电路,其中,R=R1+R2,L=L1+L2,ZM为LM与RM的等效阻抗,U2为二次侧电压。

式中,i2为负载电流,即流过电阻R0上的电流。
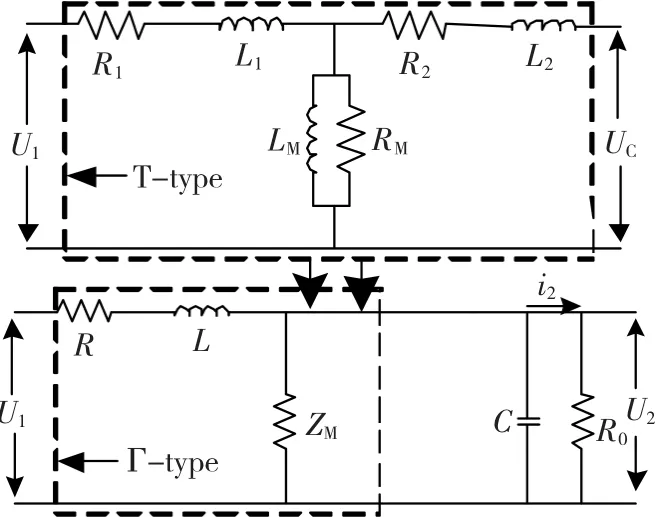
图2 变压器等效电路Fig.2 Equivalent circuit of transformer
2 PR控制策略分析
PR控制器最早是根据三相系统中同步dq轴系调节器在旋转参考系中控制直流信号,能实现零稳态误差的原理推导而来,即是从同步旋转坐标中的PI控制器等效变换过来的,也可以称作广义交流PI控制器[15]。可以直接控制交流量来达到消除稳态误差的目的。
2.1 理想的PR控制器
理想的PR控制器数学传递函数

其中:Kp为比例系数,影响系统对阶跃信号的瞬态响应速度;Ki为基波谐振系数,决定了系统对基波正弦信号的响应速度及补偿效果;ω0为基波角频率[19]。当Kp=1,Ki=500,ω0=800π时,理想PR控制器的频率特性如图3所示,该控制器在以谐振频率400 Hz为中心很窄的频带内具有无限的增益(由于系统舍入误差的存在,图中的增益并不是无限大),而在其他频率点处的增益由Kp决定,受谐振控制器的影响不大。但在实际系统中由于基波频率存在波动,对于400 Hz系统,则频率波动范围为±2 Hz。由式(2)可得400 Hz处增益为无穷大,而398 Hz和402 Hz处的增益仅为74.5 dB。因此当逆变器输出频率发生波动时,系统增益将会急剧减小,输出电压误差增大,响应速度减小,输出性能将会无法满足要求。
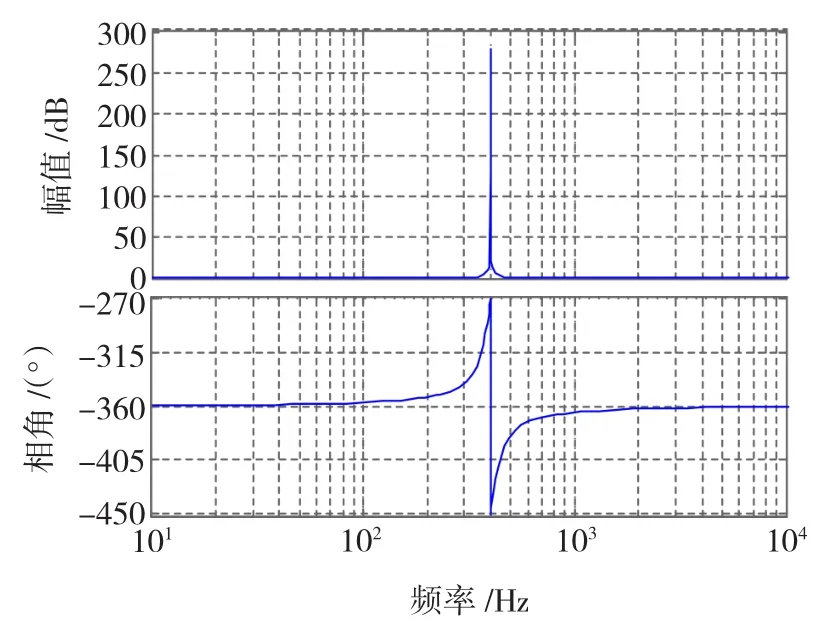
图3 理想PR控制器频率特性Fig.3 Frequency response curves of ideal PR controller
2.2 实际使用的PR控制器
基于理想PR控制器的缺陷,实际系统中都会加入谐振控制器的截止角频率ωc,得到实际采用的PR控制器为

通过式(3)可以得到,实际使用的PR控制器包含3个变量,下面分别单独改变Kp、Ki、ωc,观察其频率特性的变化,并对各个变量所起的作用进行分析,实际PR控制器的频率特性如图4所示。
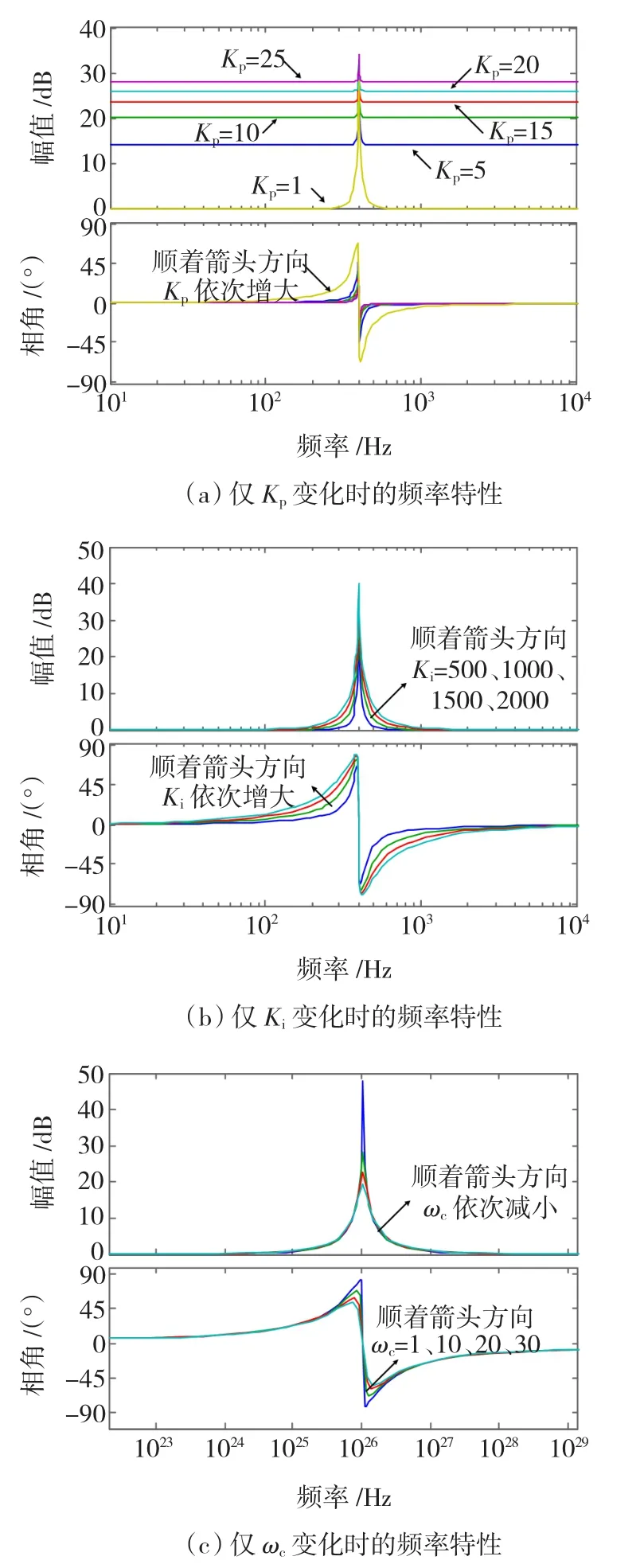
图4 实际PR控制器频率特性Fig.4 Frequency response curves of practical PR controller
图4中(a)仅Kp改变,可以看出频带以外的幅值随着Kp的增大而增大,而基波频率处的幅值增加幅度不大,说明Kp太大后对谐振的作用并不大。图4中(b)仅Ki改变,可以看出,随着Ki的增大,基波频率处的增益增大,表明它是起消除稳态误差的作用。但Ki的增大也使得PR控制器的频带范围加大,进而增加了谐振的影响范围,使得无用信号被放大,不利于系统整体的稳定。图4(c)仅ωc改变,可以看出,随着ωc的减小,基波频率处的增益增大,频带变窄,说明其对信号具有良好的选择性,ωc决定着控制器的带宽。对比图4(c)与图3可以得到,当Kp与Ki取值不变,PR控制器增加ωc项后,基波频率处的增益减小,这样在基波频率允许波动范围内,系统的稳定性得到加强。
2.3 多重PR控制器
由于PR控制器的频带很窄且基本上只在基波频率处具有调节作用,对于低次谐波的补偿几乎不起作用,所以为了对谐波进行补偿,本文采用多重PR控制器,其传递函数为

式中,n为需要调节的谐波次数,Kin为谐振系数,取Kp=1,ω0=800π,Kin=500 和1500,n=1,3,5,7 时,可得多重PR控制器的频率特性如图5所示。控制器在基波和3,5,7次谐波处幅值最大,Kin越大,幅值增益越大,控制器对基波的跟踪效果和对谐波的补偿效果越好,表明Kin决定了系统对n次谐波的响应速度和补偿效果。当Kin大于1500时,谐振频率附近的有效带宽增大,使得谐振控制器之间相互影响,有效带宽发生重叠现象,如图6所示。

图5 多重PR控制器频率特性Fig.5 Frequency response curves of multi-ply PR controller
3 双闭环PR控制
为了充分利用PR控制器的特性,采用电压外环、电流内环的双闭环PR控制策略,利用电流内环快速、及时的抗干扰性来有效的抑制负载扰动影响,双闭环PR控制系统原理框图如图7所示。图7中Vref为参考电压,GPRV(s)为电压环 PR控制器,GPRI(s)为电流环PR控制器,Gi为控制对象,R0为负载电阻,V为系统输出电压。
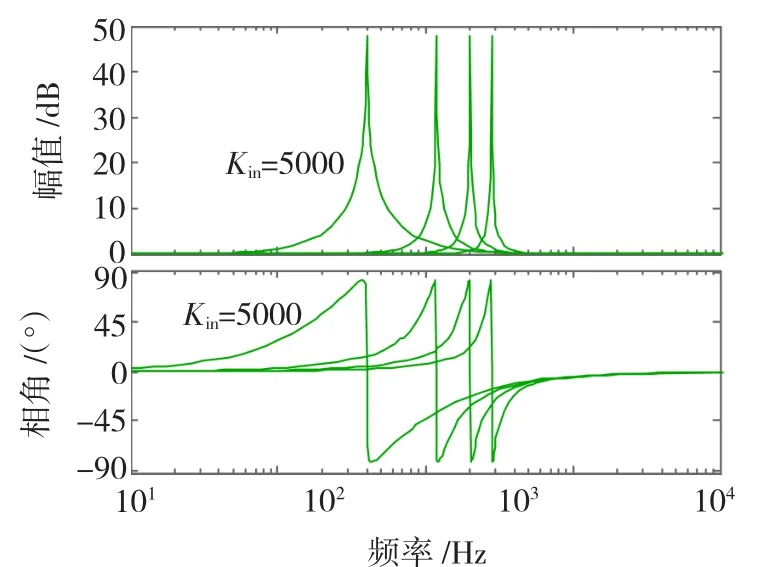
图6 相互影响的多重PR控制器频率特性Fig.6 Frequency response curves of international multi-ply PR controller
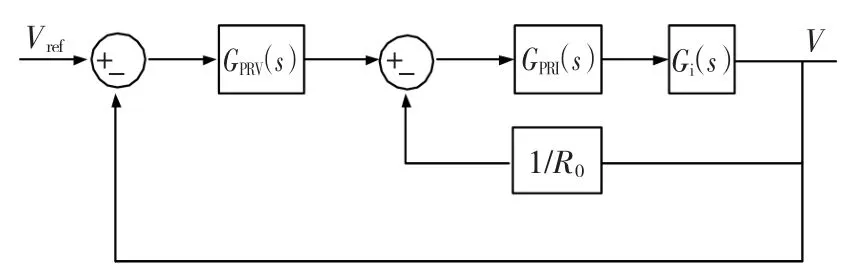
图7 双闭环PR控制原理框图Fig.7 Control block diagram of dual closed-loop PR control strategy
由此得双闭环PR控制系统的闭环传递函数为

双闭环PR控制器可根据静止式中频电源模型来设计,具体步骤如下:
1)谐振控制器截止角频率ωc的参数设计。
由前述可知ωc决定着控制器的带宽,ωc越小,谐振控制器的带宽越窄,谐振频率点处的增益越大,对信号的选择性越好,但是谐振频率点附近的增益随频率波动变化越大,而且由于量化和舍入误差的存在,采用DSP实现起来更困难。所以ωc应折衷选取,文献[19]研究认为ωc取5~15 rad/s可以得到较好的控制效果。对于400 Hz系统,ωc取10 rad/s时,控制器在400 Hz附近的增益变化最小,因此双闭环PR控制器中ωc取10 rad/s。
2)比例控制参数Kpv与Kpi设计。
由图4(a)可知,比例谐振控制器只是在谐振点对系统的频率特性有影响,在其它点影响较小。因此设计比例参数时,先不考虑谐振控制器,仅采用比例控制来设计,得到合适的比例控制参数后再设计谐振控制参数。为了使系统具有较好的稳定性,通常要求400 Hz系统在频域特性中的相角裕度为30°~60°,幅值裕度大于等于6 dB,因此系统中比例控制参数Kpv、Kpi在允许的情况下应尽量增大。但双闭环系统中的一对极点会随着Kpv、Kpi的增大逐渐接近并穿越虚轴,进入右半平面,导致系统不稳定。如图8所示,Kpv、Kpi取[0,0.4]、[0,0.6]、[0,0.8]、[0,1]。因此在保证系统稳定的情况下,Kpv、Kpi的取最大值1。

图8 Kpv、Kpi取不同值时的系统极点分布Fig.8 The root locus when Kpv、Kpiare changed
3)谐振控制参数Kivn与Kiin设计
由前述分析可知,谐振控制参数越大,谐振点的开环增益越大,系统对于400 Hz信号的稳态误差越小、响应速度越快,但谐振控制器对其他区域的影响也越大,会影响系统的稳定性。由于谐振点附近的相位有±90°的变化,所以根据频域特性很难判定系统是否稳定,而通过Kivn、Kiin的参数根轨迹,可方便的得到系统稳定时Kivn、Kiin的取值范围。如图9所示,Kivn、Kiin取[0,400]、[0,600]、[0,800]、[0,1000]。在保证系统稳定的情况下,谐振控制参数尽量取大,但必须小于1500。3、5、7次谐振控制参数具体值由闭环系统谐波含量确定。
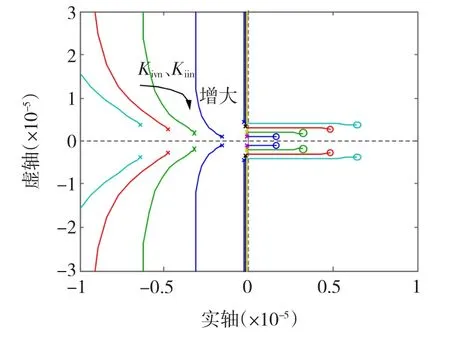
图9 Kivn、Kiin取不同值时的系统极点分布Fig.9 The root locus when Kivn、Kiinare changed
这里取Kpv=Kpi=1,ωc=10,ω0=800π,Kiv1=Kii1=1000,Kiv3=Kii3=800,Kiv5=Kii5=600,Kiv7=Kii7=500,得到的PR控制器频率特性、双闭环系统的频率特性和根轨迹如图10所示。由图10(a)可得PR控制器在400 Hz处增益为35 dB,而398和402 Hz处为30.8 dB和29.9 dB,当输出频率发生波动时,系统增益变化较小,系统稳定性较高;图10(b)双闭环系统的频率特性表明3、5、7次谐波得到了很好的抑制。

图10 设计使用的PR控制器特性Fig.10 The characteristic of designed PR controller
4 实验结果
为了验证双闭环PR控制策略的特性及仿真的正确性,在单相100 kVA样机上进行了实验:直流母线电压513 V,滤波电容166 μF,开关频率10 kHz。图11为输出电压55 V时,谐波补偿前后的电压波形及频谱。从图中可以看出3、5、7次谐波分别由2.11%、0.97%、0.66%降为0.96%、0.49%、0.31%,输出电压THD由3.81%降为1.87%,表明输出电压3、5、7次谐波得到了有效的抑制。表1和表2为样机满功率运行,输出电压230.95 V时,HIOKI-3194谐波分析仪实时测量得到的输出电压和各次谐波电压结果。输出电压THD为1.57%。

图11 谐波补偿前后的电压波形及频谱Fig.11 The waveform and spectrum of voltage

表1 谐波分析仪实时测量的输出电压值Table 1 The valtage value of real time measured by harmonic analysis
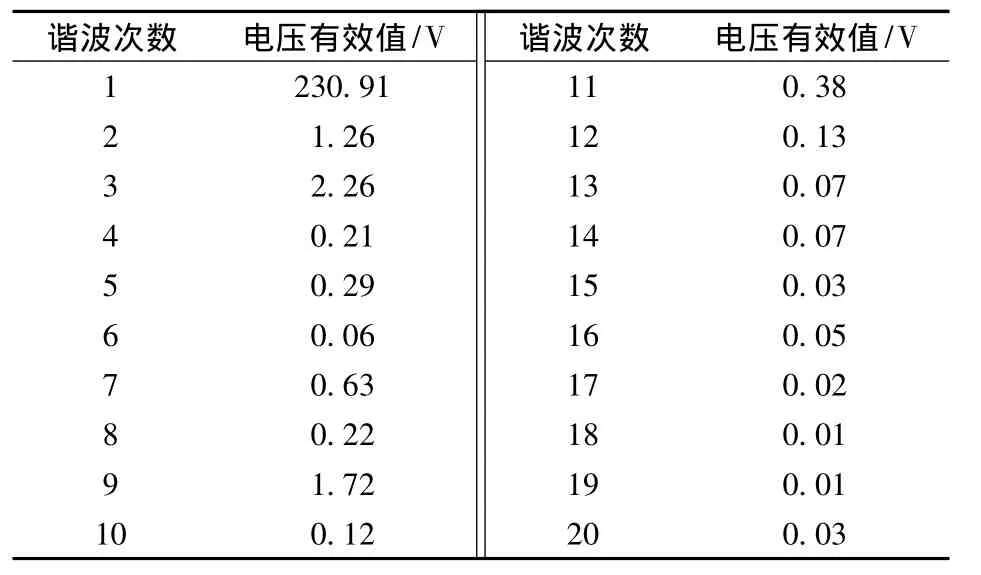
表2 谐波分析仪实时测量的各次谐波电压值Fig.2 The harmonic voltage value of real time measured by harmonic analysis
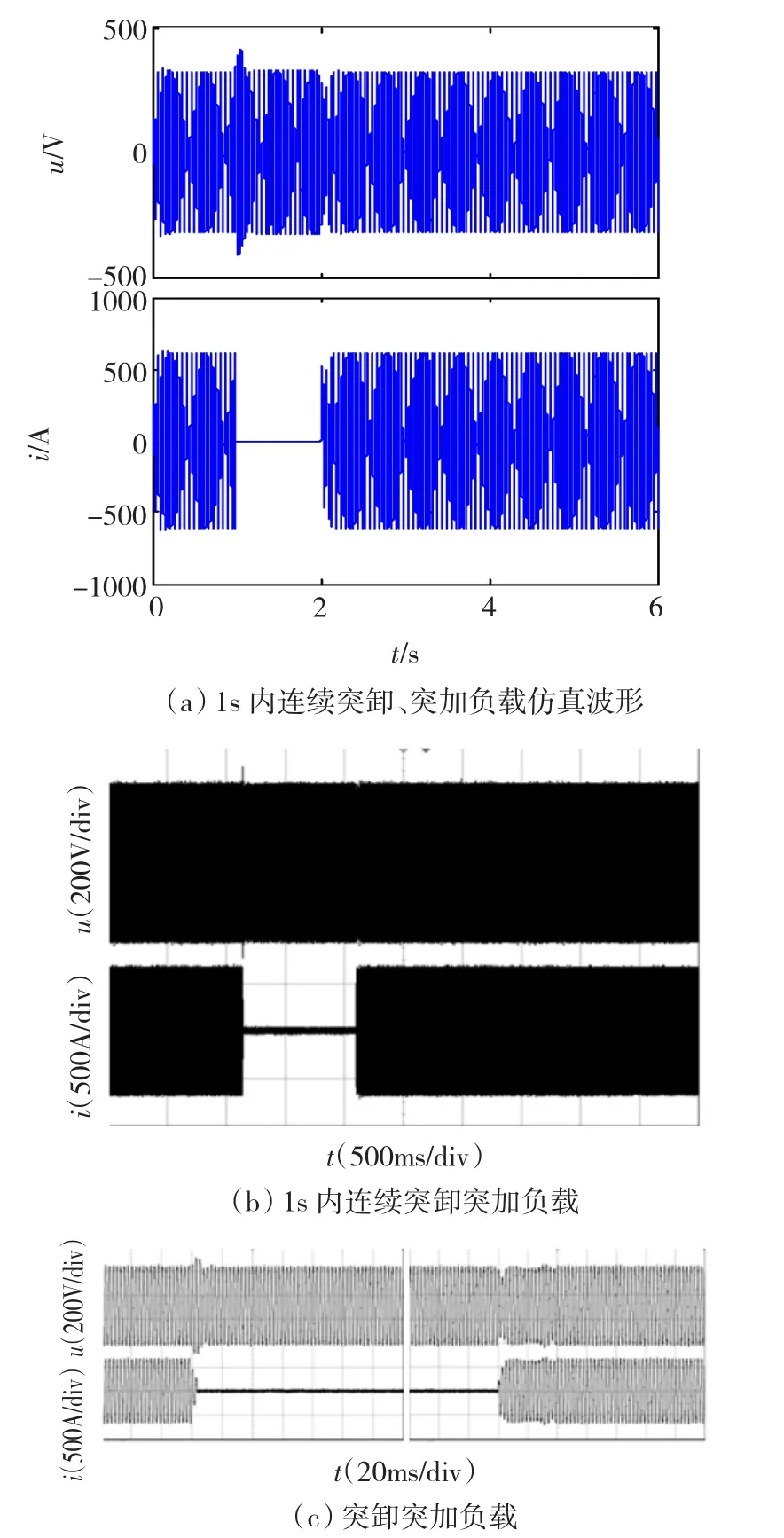
图12 系统突卸、突加负载时输出电压和电流波形Fig.12 The waveform of load disturbance
图12为中频电源样机1 s内连续突卸和突加满负载的输出电压和电流仿真和实验波形,输出电压230 V,输出电流438 A,其动态恢复时间小于20 ms,进一步证明了双闭环PR控制良好的动态响应。
图13为接整流型非线性负载,采用双闭环PR控制策略时电压、电流波形及其频谱。输出电压THD为1.76%,表明双闭环PR控制策略对非线性负载良好的控制性能。
5 结论
本文在基于静止式中频电源的基础上,详细分析了PR控制策略的原理、特性以及设计方法。提出了电流内环和电压外环均采用PR控制的双闭环PR控制策略,并进行了仿真和实验验证,可以得到如下结论:
1)PR控制策略中各个参数对控制系统具有明确的调节作用,Kp影响系统对阶跃信号的瞬态响应速度;Kin决定了系统对n次谐波的响应速度和补偿效果;ωc决定着控制器的带宽。
2)本文提出的双闭环PR控制策略利用电流内环快速、及时的抗扰性来有效的抑制负载扰动影响,控制器参数的可调节性较强,带宽调节裕度较大,非线性负载控制能力强,且对低次谐波具有选择性补偿功能。
3)通过对仿真和实验结果的分析对比,证明了本文提出的基于静止式中频电源的双闭环PR控制策略的正确性和有效性。
[1]张纯江,张婧,邬伟扬,等.基于Delta算子的谐振控制器实现高频链逆变器波形控制[J].电工技术学报,2008,23(7):81-85.
ZHANG Chunjiang,ZHANG Jing,WU Weiyang,et al.High-frequency link inverter waveform control with resonant controller based on delta operator[J].Transactions of China Electrotechnical Society,2008,23(7):81 -85.
[2]王继东,朱雪玲,苏海滨,等.三相光伏并网Z-源逆变器的比例谐振控制[J].电机与控制学报,2010,14(4):86 -91.
WANG Jidong,ZHU Xueling,SU Haibin,et al.Proportional-resonant control for Z-source inverter in three-phase PV grid-connected system[J].Electric Machines and Control,2010,14(4):86 -91.
[3]刘春喜,马伟明,孙驰,等.大功率400Hz逆变电源数字控制设计[J].电工技术学报,2011,26(1):100 -107.
LIU Chunxi,HU Wenhua,SUN Chi,et al.Digital control design of high power 400Hz inverters[J].Transactions of China Electrotechnical Society,2011,26(1):100 -107.
[4]李子欣,王平,李耀华,等.采用数字控制的400Hz大功率逆变电源[J].中国电机工程学报,2009,29(6):36 -42.
LI Zixin,WANG Ping,LI Yaohua,et al.400Hz high-power voltagesource inverter with digital control[J].Proceedings of the CSEE,2009,29(6):36 -42.
[5]贾德利,尤波,许家忠,等.逆变式等离子切割电源变间距模糊-PI控制[J].电机与控制学报,2008,12(3):313-318.
JIA Deli,YOU Bo,XU Jiazhong,et al.Variable interval fuzzy-PI control for inverted plasma cutting power supply[J].Electric Machines and Control,2008,12(3):313 -318.
[6]ZMOOD D N,HOLMES D G.Frequency-domain analysis of threephase linear current regulators[J].IEEE Transactions on Industry Applications,2010,37(2):601 -610.
[7]LOH P C,NEWMAN M J,ZMOOD D N,et al.A comparative analysis of multiple-loop voltage regulation strategies for single and three-phase UPS systems[J].IEEE Transactions on Power Electronics,2003,25(3):1176 -1185.
[8]ZMOOD D N,HOLMES D G.Stationary frame current regulation of PWM inverters with zero steady state error[J].IEEE Transactions on Power Electronics,2003,18(3):816 -817.
[9]VALDERRAMA G E,STANKOVIC A M,MATTAVELLI P.Dissipativity-based adaptive and robust control of UPS in unbalanced operation[J].IEEE Transactions on Power Electronics,2003,18(4):1056-1062.
[10]MATTAVELLI P,MARAFAO F P.Repetitive-based control for selective harmonic compensation in active power filters[J].IEEE Transactions on Industrial Electronics,2004,51(5):1018-1024.
[11]ADRIAN T,MARCO L.Evaluation of current controllers for distributed power generation systems[J].IEEE Transactions on Power Electronics,2009,24(3):654 -663.
[12]BODE G H,LOH P C,NEWMAN M J.An improved roubust predictive current regulation algorithm[J].IEEE Transactions on Industry Applications,2005,41(6):1720 -1733.
[13]KOEN J P,KOEN V,JEROEN V,et al.Distributed control of renewable generation units with integrated active filter[J].IEEE Transactions on Power Electronics,2004,19(5):1353 -1360.
[14]HENG D,ORUGANTI R,SRINIVASAN D.PWM methods to handle time delay in digital control of a UPS inverter[J].IEEE Power Electronics Letters,2005,3(1):1 -6.
[15]YUAN X M,MERK W,STEMMLER H,et al.Stationary-frame generalized integrators for current control of active power filters with zero steady-state error for current harmonics of concern under unbalanced and distorted operating conditions[J].IEEE Transactions on Industry Applications,2002,38(2):523 -532.