初探神经网络在电动洗胃中的应用
2012-09-20孙逊
孙逊
(上海应用技术学院 电气与电子工程学院,上海 201418)
0 引 言
鉴于电动洗胃过程缺乏工况自判断和易发生洗胃致胃损伤等情况[1],本文研究根据BP网络原理改造的DXW-2A洗胃机对模拟胃的洗胃实验,提出一种成人用智能化洗胃技术。
1 工作原理与过程
为避免洗胃损伤和传感器置入胃中定点检测洗胃参数的操作困难,把软测量与神经网络相结合[2],传感器均置于洗胃机内,以时间、液位、洗胃压力、浑浊度和PH值作为易测二次变量予以监控,洗胃状况作为难以直接测量的主导变量,神经网络根据采样值和计算值推算洗胃状况。执行元件和检测元件的安装位置见图1。主要工作原理如下:
负压吸引阶段,图1中电磁阀2通,光电开关1检测到气动阀将药水缸与药水桶连通,污水缸与胃连通时,即可将胃容物吸入污水缸,药水桶内洗胃液同时吸至药水缸。当液位传感器1探测到污水缸满或压力传感器探测到压力达到设定值时,吸引结束,切换到正压灌洗。届时电磁阀1通,光电开关2检测到气动阀使药水缸与胃连通,污水缸与污水桶连通时,即可把洗胃液注入胃中,同时把污水缸内污液向污水桶排放。当液位传感器2探测到药水缸排空或压力传感器探测到压力达到设定值时,灌洗结束,完成一次洗胃循环。若发生堵管,则用反压冲开堵塞物,同时报警。重复上述吸引和灌洗的过程,直至洗胃顺畅且浑浊度传感器和PH传感器检测洗胃已清洁后,提示洗胃结束。
2 神经网络对洗胃状态的分析
2.1 洗胃状态分类
根据胃管流量、洗胃压力和时间三者之间的非线性函数关系可区分洗胃过程中出现的正常、堵塞、不完全堵塞和设备故障四类状态,结合吸出物的浑浊程度和PH值,可判断是否已洗胃清洁,结束洗胃。只要能正确判定当前的洗胃状态,就能减轻医务人员的劳动,实现精确自动控制。
传统方法常把工作曲线、曲线误差和对应工况预存于ROM,通过查表进行控制。由于洗胃阶段柔性胃在受迫运动时压力、流量和时间等参数的函数关系难以精确获得,故洗胃测控至今不理想。胃容物是动态变化的固、液二相流体,文献[3]未研究其不完全堵塞胃管的问题,而文献[4]求流量的方法较复杂,尚不利于装备的小型化。鉴于胃管内的流量不易直接测量,本文采用测量圆柱缸内液位的方法间接获得瞬时流量信息。
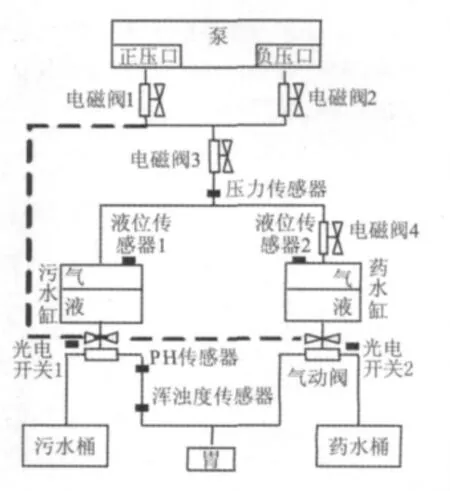
图1 主要测控点示意图


图2 洗胃压力曲线
例如,图2中吸引阶段压力变化率18~30kPa/s或小于零表示管路堵塞,3.0~6.9kPa/s则是正常运行;灌洗阶段压力变化率17.5~90.0kPa/s或小于零是堵塞,0.2kPa/s是正常运行,16.0kPa/s和12.3kPa/s则可能是不完全堵塞,也可能是正常洗胃。本文仅讨论用神经网络处理洗胃工况,不涉及对洗胃系统机电故障作详细分类识别。
把上述值归一化处理,并考虑各洗胃机之间的机械和测试系统元器件的误差等因素,曲线的导数允许±2.5%误差。于是,吸引阶段58.5~100%和-68.3~-71.8%表示堵塞,23.7~58.4%是不完全堵塞,9.75~23.60%是正常洗胃,0~9.74%是故障现象;灌洗阶段19~100%和-51.7~-54.3%表示堵塞,0.22~18.90%是不完全堵塞,但其中13.3~14.0%和17.3~18.2%可能是正常洗胃,0.195~0.210%是正常,0~0.194%是故障。
可见仅从压力曲线获得数据尚不能正确区分上述状态,例如正常灌洗曲线的部分导数易与不完全堵塞的导数混淆,故有必要增设液位变量。
由于洗胃机的动力机械结构基本沿用DXW-2A机型,故正常情况下吸引和灌洗时间9.8s和9s与原机型相同,二缸可容纳流体高度为H,则洗胃中液位平均变化速率分别是H和H。同样考虑±2.5%误差,并把液位探测器测得的液面高度h(t)的变化率归一化处理,设定吸引阶段污水缸液位每秒升高总高度的0~2.6%为堵塞,2.7~9.8%为不完全堵塞,9.9~10.5%为正常,10.6~100%为故障,而灌洗阶段药水缸液位每秒下降总高度的0~2.9%为堵塞,3.0~10.7%为不完全堵塞,10.8~11.5%为正常,11.6~100%为故障。
吸引和灌洗不会同时发生,取CPU发出的吸引和灌洗切换信号flag=0代表吸引阶段,反之灌洗阶段。
正常洗胃过程中,达到吸出液体清晰,PH值接近洗胃液时可结束洗胃[5]。把洗胃液的相对PH值取为50%,取PH传感器测得吸出物相对PH值为50±2.5%,浑浊度传感器测得胃容物的浑浊度相对值NTU<30%时,表示清洁成功,提示医护人员可停止洗胃。灌洗阶段无胃容物吸出,这时微处理器不接受浑浊度和PH传感器测量值,在RAM中把相应测量结果置1处理。
2.2 神经网络模型
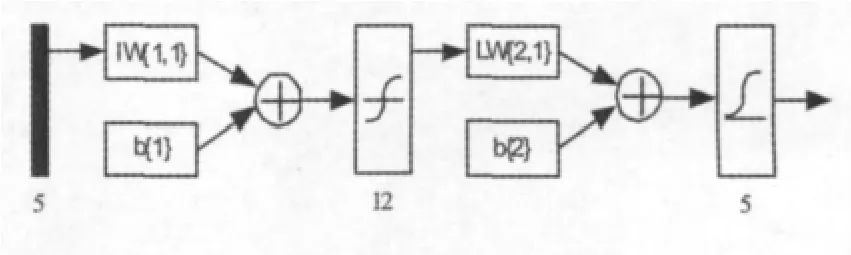
含有隐层的网络可以扩大原来输入模式的范围,隐层中总会有输入模式的内部表示,当从输入到足够大的隐层集合能正确连接,网络将通过隐层执行从输入到输出的任何匹配关系[6]。具有单隐层的前馈网络可以映射所有非线性连续函数,故采用含单隐层BP网络识别洗胃机工作状态。
将压力和液位的变化率及吸出物浑浊度和PH值作为BP网络研究对象,把实验数据分为二组样本,一组用来对网络进行训练,另一组用于对网络的泛化能力进行检验。样本中考虑的影响参数即网络的输入参数包括:传感器所测气压变化率、液位传感器测得液位变化率、浑浊度NTU和标志flag。输出参数包括正常、不完全堵塞、堵塞和故障,用二进制的1表示当前有效状态。

2.3 神经网络的训练与仿真
训练样本集如下表1。经输入MATLAB7训练后,误差已很小,其结果曲线如图4所示。
把表2中的输入样本代入神经网络模型仿真,得到的仿真结果中小于0.5取为零,否则取1,可见该网络能正确判断出四种不同工况。
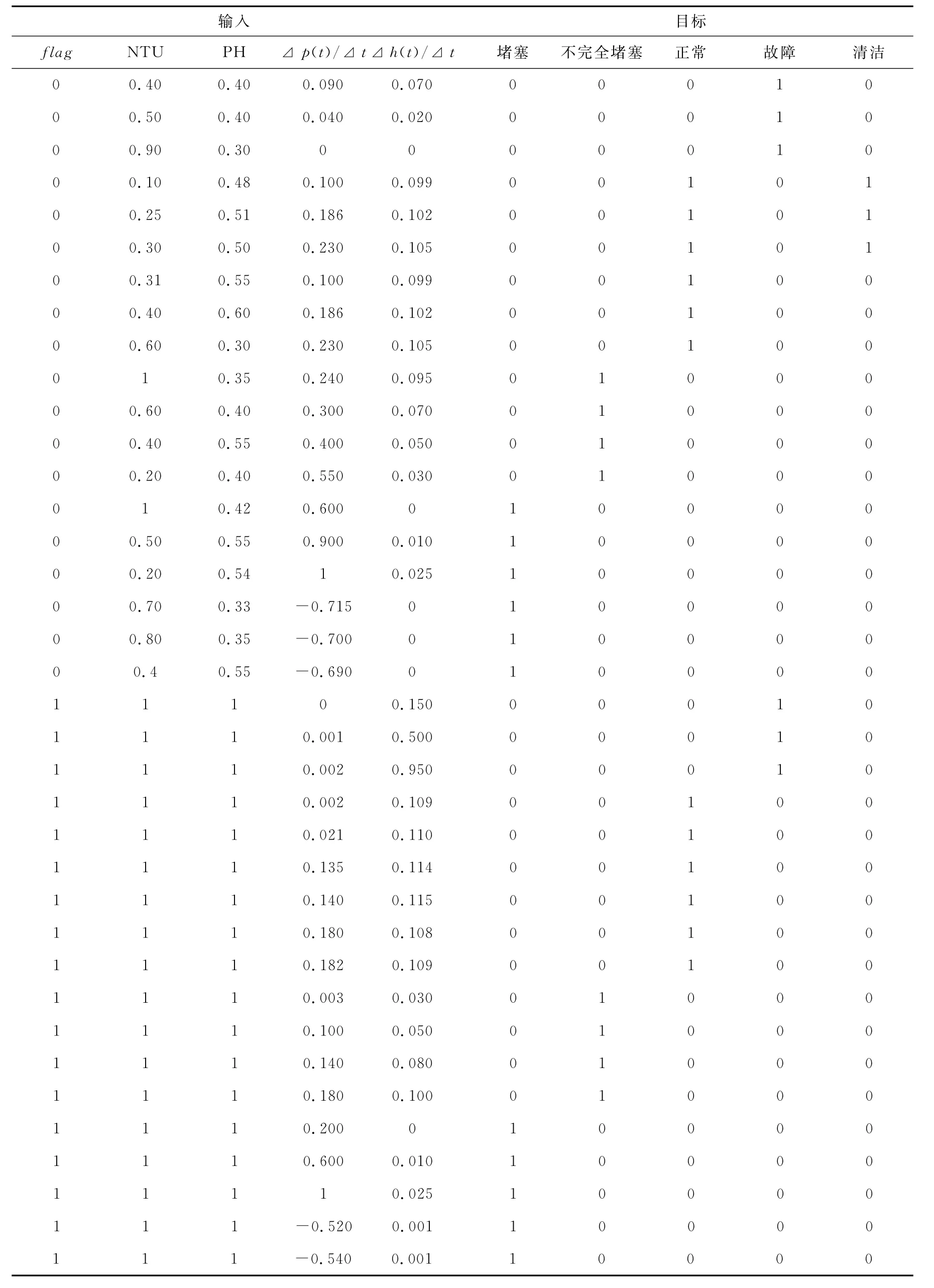
表1 训练样本集

表2 仿真样本集
3 结束语
目前该机尚在研制之中,试验中样本数据尚不满足样本数≈权值与阈值总数
训练误差的要求,对具体故障尚不能进行区别,洗胃训练样本尚需改进。
仿真基本成功的意义是,神经网络适用于双缸循环冲洗装置对柔性密闭容器内的清洗控制。
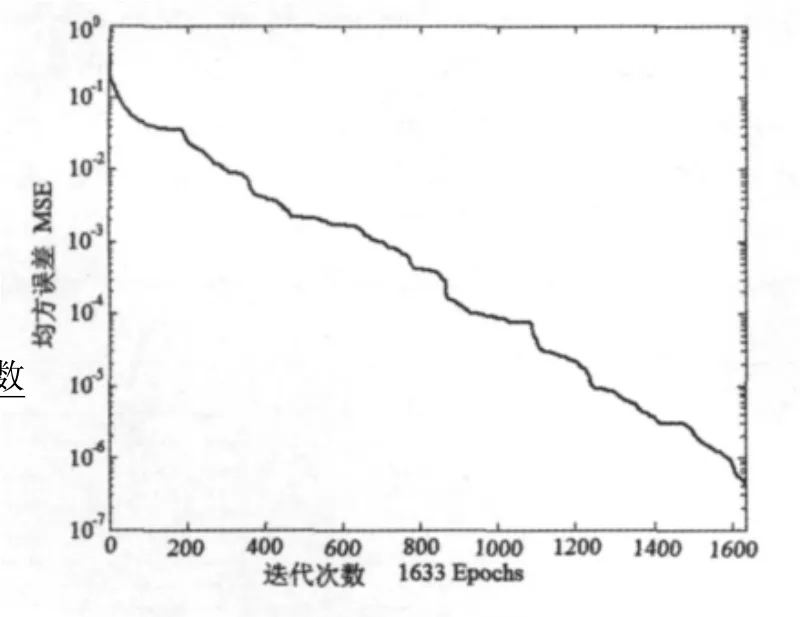
图4 训练结果均方误差曲线
[1]王娟,梅云霞.洗胃研究进展[J].现代生物医学进展,2006,6(9):116-118.
[2]卿晓霞,余建平,王波.基于粗糙集-神经网络的污水参数软测量技术研究[J].电气自动化,2005,27(3):64-66,69.
[3]Sun Xun,Zhang Renjie.Design of Pressure-Controlled Electric Gastric Lavage Machine.Proceedings of the Third International Symposium on Test Automation &Instrumentation,Vol.1,Xiamen China,May 22-25,2010[C].World Publishing corporation.
[4]辽宁工程技术大学.固液两相流流量电容实时检测装置及检测方法[P].中国,CN1737507A,2006.
[5]邓洁英,陈月英,吴春芳等.检测洗胃前后胃液pH值探讨有机磷中毒救治效果[J].中国实用护理杂志,2005,21(4):17.
[6]罗四维.人工神经网络建造[M].北京:中国铁道出版社,1998.
[7]林海军,齐丽彬,张礼勇,等.基于BP神经网络的模拟电路故障诊断研究[J].电测与仪表,2007,44(12):41-51.
[8]Hagan,Martin T.,Demuth,Howard B.,Beale,Mark H.Neural network design[M].Boston:PWS Pub.1996.
