一种新颖控制模式的双向DC/DC变换器研究及设计
2012-09-20孙佳田勇
孙佳,田勇
(南京航空航天大学 民航学院,江苏 南京 210016)
0 引 言
双向 DC/DC变换器(Bi-directional DC-DC Converter,BDC)是一种能实现双象限运行的直流变换器,其输入、输出电压极性不变,电流的方向可以改变,能够实现能量的双向传输,是典型的“一机两用”设备,大大减轻了系统的体积和重量,节约了成本,具有重要研究价值[1]。
目前关于BDC的研究主要集中在BDC拓扑研究[2]、建立相关数学模型[3-4]以及提出先进的控制算法[5-6]。本文针对非并网发电系统能量流动方向判断的问题,选取双向Buck-Boost变换器作为研究对象,提出了输入电压外环,电感电流内环控制模式,这不仅可以实现恒流控制,而且能够跟踪系统能量流向,自动实现充放控制。
1 双向变换器工作原理
本文选取双向Buck-Boost拓扑为研究对象,图1给出了其拓扑结构图。
其中,V1为直流总线电压,V2为蓄电池的端电压,C1和C2分别为输入侧和输出侧滤波电容,Q1和Q2为互补导通的开关管,L为滤波电感,iL为电感电流。Buck-Boost双向变换器有3种工作方式:Buck工作方式,Boost工作方式和交替工作方式。前两种工作方式,特点是电感电流iL恒大于0或恒小于0,对于交替工作方式,有6种工作模态,其工作时的波形如图2所示。

图1 双向Buck-Boost变换器拓扑图
模态1(t0~t1):Q1导通,电感电流反向线性减小。
模态2(t1~t2):V1经过Q1给蓄电池V2充电,电感电流正向线性增加,直至t2时刻。
模块3(t2~t3):由于死区存在,电感电流经D2续流,正向线性减小。
模态4(t3~t4)。Q2导通后,电感电流继续正向线性减小,直至为0。

图2 交替工作方式工作模态原理图
模态5(t4~t5):电感经过Q2储能,电感电流反向线性增加。
模块6(t5~t6):iL经D1续流反向减小,直至t6时刻Q1导通。
2 能量判断模型及控制系统设计
对于非并网风电分布式发电系统,Buck-Boost双向变换器对蓄电池进行充放电控制,V2可以当做是一个恒定值,因此这种场合下需要采用电流控制模式,能量流动方向取决于风电发电系统提供的功率大小,所以双向变换器对能量流动的判断是非常重要的环节。
授课教师必须有较好的专业英语基础及口语表达能力,教师在取得授课资格前应该通过同行及学生参与的试讲,在英语水平,授课方式和内容上合乎要求后方能给留学生授课。授课前必须细致备课,对于预估到的重点、难点应更细致地阐述。授课结束前,及时发现学生学习上的难点,进一步将难点阐释清楚;根据学生们的反馈调整、改进授课内容及讲课方式。除此之外,还需及时更新课程内容,与国内外最新进展同步。此外,也要组织参加校内外的留学生教学讨论,交流经验,共同进步,促进国内整体高等医学的留学生教育水平的提高。
2.1 能量流动判断模型
图3给出了能量流动判断模型的简化电路框图。将Buck-Boost双向变换器看作为端口网络,uin为变换器输入电压,iin为输入电流,i0为输出电流,电阻Rpower用来控制注入双向变换器功率大小。V1提供的能
量为:

Buck-Boost双向变换器的输入阻抗Zin和输入电流iin为:


图3 能量流动判断模型的简化框图
将式(2)化简可得:

从式(3)可以看出,当V1>uin时,能量从V1流入V2;当V1<uin时,能量从V2流入V1。忽略双向变换器以及线路等功率损耗,则有:

联立式(2),(3)和(4)可以获得输出电流iL表达式:

由(5)式可以得到Buck-Boost双向变换器能量流动判断准则:当输入侧直流电压V1大于uin控制基准电压,能量从V1流入蓄电池V2;当输入侧直流电压V1小于uin控制基准电压,能量从蓄电池V2流入V1。
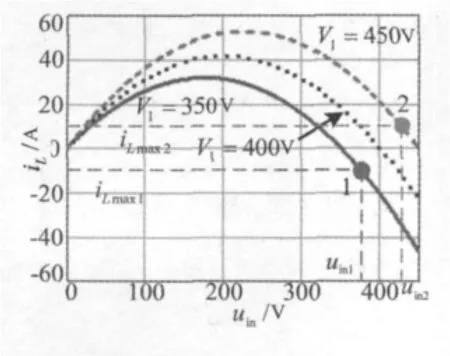
图4 i-u曲线
根据式(5),取V2=240V,Rpower=4Ω,在给定V1分别是350V,400V和450V时,作出iL-uin曲线,如图4所示。
假设控制系统中要求uin稳定在400V,则这三种情况分别对应放电状态,无能量转换和充电状态。由图4中分析可得当限制电流iLmax满足式(6)关系时,uin才能稳定为给定电压。

式(6)中,V1max为变换器输入侧直流电压在变化范围中最大值。
2.2 控制系统设计
根据2.1节介绍的能量判断模型,其优点在于即能实现电流模式控制,又能判断系统能量流动方向。图5给出了系统总体控制框图。

图5 系统总体控制框图
图5中,电压外环和电流内环均采用PI控制器,变换器是一个纯滞后环节,设计时直接降阶处理为一个比例环节Kpwm,L、C为滤波电感和滤波电容,Req为输出等效负载,D为稳态时占空比,Kfi为电流反馈系数,Kfv为电压反馈系数。
根据图6可以得到电流内环开环和闭环传递函数为:

电压外环和电流内环传递函数为:

本文采用极点配置法来设计系统参数,将其中两个极点配置为一对共轭极点,另外两个极点配置在距虚轴很远的地方。假设希望闭环主导极点为s1,2=-ζrωr±jωr(ζr期望阻尼比,ωr期望自然频率)。期望的闭环非主导极点分别为s3=-mζrωr,s4=-nζrωr(m,n=[5,10]),取m=n,则双环控制系统的期望特征方程为:

比较式(9)和(10)可以得到两个PI环参数。实际系统中L=1.3mH,C=500μF,D=0.6,Req=5.3Ω,Kfv=0.01,Kfi=0.1。综合选取期望阻尼比ζr=0.8,期望自然频率ωr=2 500,n=10,则可以获得PI参数为:Kvp=1.25,Kvi=1 940,Kcp=57.2,Kci=502 458。
3 仿真实现
在Saber中搭建相应的模型。系统仿真参数为:系统功率为10kW,滤波电感L=1.3mH,滤波电容C=500μF,开关频率为20kHz,uin稳定电压为400V,蓄电池V2=240V,系统额定工作电感电流iL=41.7A,电感电流限制值iLmax=55A,输入侧直流V1在300V~500V范围变换,Rpower=4Ω,开关频率f=20kHz驱动芯片采用SG3525芯片来实现,其内部运算放大器搭建成跟随器,输出互补开关脉冲信号,死区时间可设置。
图6(a)给出了系统的驱动信号,可以看出两路驱动信号采用互补方式进行触发,频率为20kHz。图6(b)所示驱动信号死区时间为500ns。

图6 两路互补驱动信号
图7(a)给出了V1从500V突变到300V仿真结果,可以看出,当t为0~0.5s时,V1大于uin,电感电流为正;当t为0.5~1s,V1小于uin,电感电流为负。图7(b)给出了V1从300V突变到500V仿真结果,可以看出,在V1切换时,系统能够快速跟踪能量流动方向,并作出响应。

图7 V1变化时,仿真结果
文中研究了电感电流限制值和uin稳定电压大小之间的关系,并推导出能够满足系统正常工作的电感电流限制值条件。仿真中将iLmax设置为27.5A,图8给出了仿真结果。
图8(a)给出了iLmax小于额定工作时电感电流的仿真结果,从图中可以看出,在0~0.5s蓄电池充电状态,uin偏高于稳定电压400V;在0.5~1s蓄电池放电状态,uin偏低于稳定电压400V,仿真结果和前面理论推导一致。图8(b)所示为系统正常工作时iL和uin的局部放大图,可见稳态时纹波均比较小,满足系统设计要求。

图8 (a)不满足电感电流限制值仿真结果(b)系统正常工作波形局部放大图
4 结束语
对于非并网风电式发电系统,本文从双向变换器输入阻抗的角度,提出一种能量流向判断模型,并给出了能量流动判断准则,通过输入侧直流V1与变换器需要稳定的输入电压uin大小比较,可以判断能量流向。根据该模型提出了一种相应的控制算法,既实现了电流模式控制,又能够检测能量流动方向,从而自动实现变换器能量双向流动。此外,对电感限制电流与uin大小关系进行研究,推导出电感限制电流限制条件。最后,通过Saber仿真软件对上述提出的模型和控制方法进行仿真,结果验证了其正确性和可实现性。
[1]张方华,朱成花,严仰光.双向DC-DC变换器的控制模型[J].中国电机工程学报,2005,25(11):46-49.
[2]WANG Kunrong,LEE Fred C,LAI Jason.Operation principle of bidirectional full-bridge DC/DC converter with unified soft-switching scheme and soft-starting capability [C].IEEE APEC 2000.New Orleans,2000:111-118.
[3]肖华锋,谢少军.一端稳压一端稳流型软开关双向DC/DC变换器(Ⅰ)-电路原理和控制策略[J].电工技术学报,2006,21(10):31-37.
[4]马棡,瞿文龙,刘圆圆.一种新型双向软开关DC/DC变换器及其软开关条件[J].电工技术学报,2006,21(7):15-19.
[5]夏超英,刘奎,郭熠.电动汽车用全数字双DC/DC变换器的实现[J].电力电子技术,2006,40(2):70-72.
[6]马皓,张涛,韩思亮.新型逆变器滑模控制方案研究[J].电工技术学报,2005,20(7):50-56.