船载卫通站伺服电机阻值跳变原因分析
2012-09-19朱其涛刘孔水闫世明
朱其涛,刘孔水,闫世明
(中国卫星海上测控部,江苏江阴214431)
0 引言
某测量船卫通站天线采用A(方位)-E(俯仰)-C(交叉)三轴跟踪体制,每轴均使用双电机驱动。天线上共有6台三相永磁交流伺服同步电机。一般情况下,视电机三相绕组U1-V1、V1-W1、U1-W1之间的阻值为1~3之间的某个稳定值为正常。某次出海期间,在对在线电机进行指标测试时,发现天线E轴和C轴的伺服电机三相绕组阻值不稳定,数字万用表的示数在-2~7 Ω之间快速跳变。而A轴的2台电机三相绕组阻值均为1.2 Ω,状态正常。为避免因处置不及时而引发设备故障,必须以剖析设备原理为切入点,找准问题根源并分析其对设备的影响情况并视情处置。
1 设备原理
1.1 永磁交流伺服同步电机的工作原理
一个两级极永磁同步电动机的结构示意图如图1所示。在定子铁芯槽内安放着接成星形或三角形的三相交流绕组 U1-U2、V1-V2、W1-W2[1]。
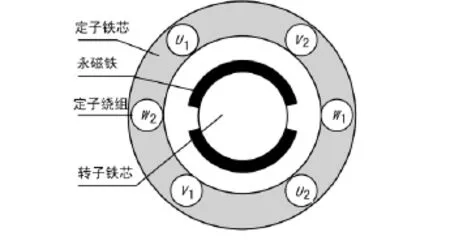
图1 三相永磁同步电机结构
根据电磁学相关原理,当对三相交流绕组接通三相交流电源后,3个绕组中便产生3个相位相差120°的交流电流,电流通过线圈时要产生磁场,3个线圈所产生的合成磁场是一个旋转磁场[2]。
转子是由高磁能积的稀土等磁性材料制成的永磁转子。按定子三相电枢绕组所加电压波形(也称驱动方式)进行分类,可分为正弦波驱动和方波驱动2种基本形式。由于方波具有控制线路简单、成本较低等优点,所以目前方波驱动使用较多。这种方法是在定子绕组中按一定相序通以交变的方波电流,为使定子三相绕组合成气隙磁场类似于跳越式前进的旋转磁场,从而产生相应的电磁转矩使转子转动。正弦波驱动方式中定子三相绕组中通以可变频的对称的正弦波电流来产生气院在旋转磁场。随着SFWM正弦波脉宽调制技术的成熟,正弦波驱动方式目前也已被广泛使用。
1.2 船载卫通站天线传动链结构
天线A、E、C三轴采用双电机驱动。驱动形式采用齿轮和行星减速器组合的方式。电机输出轴与行星减速器相连,行星减速器的输出轴连接齿轮减速箱的输入轴,齿轮箱的输出轴与固定在天线体上的扇形齿轮啮合,E、C轴传动链总传动比分别为931.84 和960。
电机内安装有电磁制动器。制动器断电时抱闸,使天线处于制动状态;加电时脱开,使电机处于自由状态。
2 简化模型图
2.1 简化模型的构建
综上所述,可得出DT890C+型数字万用表0~200 Ω档测量电机三相绕组阻值时的简化模型,如图2所示。
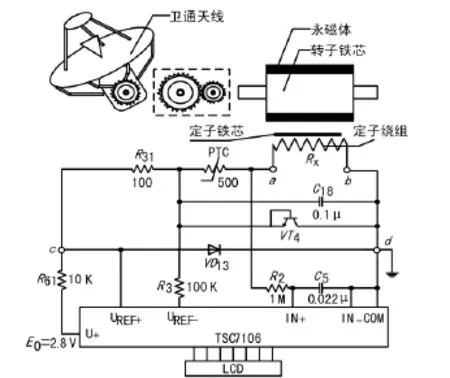
图2 简化模型
图2上半部分为天线及其传动链。实际设备中,电机转子的输出轴通过锁紧螺母和轴套与行星减速器的输入轴联结,行星减速器输出轴通过键与齿轮减速箱输入轴承相连,齿轮减速箱输出轴上的锥形齿轮与天线E轴扇齿相啮合,带动天线转动。由于行星减速器与齿轮减速箱的功能和原理一致,为了更加直观,将行星减速器和齿轮减速箱合为一体,用虚线框内相互啮合的2个齿轮表示。
由三相电机定子结构可知,无论定子的三相绕组采用星形联结还是三角形联结,管脚 U1-V1、V1-W1、U1-W1之间的电阻均分别为绕组U1U2的串联电阻、V1V2的串联电阻和W1W2的串联电阻,即电机指标测试中的待测电阻Rx。
图2采用比例法测量电阻的电路,被测电阻Rx经过PTC(正温度系数)热敏电阻与标准电阻相串联。电阻R61、二极管VD13构成基准电压(2.8 V)的分压电路,将VD13的正向压降(0.65 V)作为测试电压。C18、R2、R3、晶体管VT4以及热敏电阻PTC组成过电压保护电路,防止误用电阻档去测220 V交流电压导致7106损坏。C5为高频滤波器。另外,R2、R3分别是IN+端与 UREF-端的限流保护电阻[4]。
2.2 电阻测量原理
数字万用表由直流数字电压表(DVM)与各种变换器组合而成的。其中直流数字电压表是数字万用表的基本组成部分,是数字万用表的核心,输入到万用表的各种电量及非电量最终都要变换成直流电压量进行测量。A/D转换器是数字电压表的核心,为大规模集成电路,典型的型号有7106。
图2中,由万用表电池分压后提供的2.8 V电压E0使二极管VD13导通,c点电压被钳制在0.65 V。R31、Rx、PTC 对0.65 V 电压进行分压,7106 芯片通过IN+、IN-测量Rx两端的电压测出Rx的电阻。
3 阻值跳变原因分析
3.1 感生电动势的形成
天线晃动产生的转矩可以传递到E、C轴电机的转子上。由于日积月累的海上船摇晃动,电机转子和制动器之间的接触面已有轻微磨损,导致天线在制动状态下E、C轴仍有来回约0.05°的活动范围。天线收藏后,A轴传动链在船摇过程中不受力,所以A轴三相绕组阻值正常。伺服校相过程中多次发现:动器抱闸后,天线在风吹影响下,E、C轴轴角仍可变化,最大变化0.1°。
永磁电机的转子是磁性极强的永磁体,转子的小范围活动也会引起定子绕组周围的磁场不断变化。一个静止的导体回路,当它包围的磁场发生变化时,穿过它的磁通量也会发生变化,这时回路中会产生感生电动势Ei,其大小与磁场变化关系为:

式中,dr表示空间内任一静止回路L上的位移元;B为磁感应强度;S为该回路所限定的面积。
3.2 感生电动势对测量电路的影响
天线的E、C轴振荡使得E、C轴伺服电机定子的三相绕组产生感生电动势Ei。Ei的极性和大小在不断变化,变化周期与天线的振荡周期一致,一般应大于 0.3 s。
Rx两端的电压在输出到IN+时,电容C5并不能滤除低频交变电压Ei。因为RC滤波电路中,C的取值越大,滤波效果越好,一般取C=。T为电容充电周期,此处即为天线振荡周期,即T>0.3 s。T、R2的值可知,电容 C至少要为900 μF才能滤除感生电动势Ei。而电路中 C仅为0.022μF。因此,感生电动势的变化引起了7106芯片输入端电压UIN和参考电压UREF的变化,从而导致了万用表示数的不断变化。
4 结束语
综上所述,船载卫通站E、C轴永磁交流伺服电机定子三相绕组电阻值是由于卫通天线在船摇和风吹的影响下来回晃动,并且制动器和电机转子的接触面已轻微磨损,制动器无法抑制E、C轴在来回0.05°的范围内的活动,转子转动引起定子周围磁场不断变化,在定子两端产生了不稳定的感生电动势,干扰了万用表的电阻测量电路,从而引起了电阻值的跳变。
[1]陈建国,张纯亮.电机与控制[M].西安:西北工业大学出版社,2006:49-51.
[2]赵君有,张爱军.控制电机[M].北京:中国水利水电出版社,2006:56-83.
[3]刘 华,徐静镠,曹冬冬,等.电机与拖动技术(基础篇)[M].大连:大连理工大学出版社,2006:164-165.
[4]吴培生,孟贵华.万用表使用入门[M].北京:机械工业出版社,2004.
[5]张三慧.大学物理第三册——电磁学[M].北京:北京清华大学出版社,1999:327-328.
[6]杨海祥.电子电路故障查找技巧[M].北京:机械工业出版社,2004.
