存储测试技术中采样策略的研究
2012-09-19裴东兴张红艳王亚军
王 鹏 裴东兴 张红艳 王亚军
(中北大学电子测试技术重点实验室,山西 太原 030051)
0 引言
存储测试不同于广义的存储测试技术,它是一种新概念动态测试技术。该技术具体阐述为:在对被测对象无影响或影响在允许范围的条件下,在被测对象内置入微型数据采集与存储测试仪,现场实时完成信息的快速采集与记忆;测试完毕后回收记录仪,由计算机处理和再现测试信息[1]。
由于存储测试仪置入被测体所在环境之中,故被测对象所处环境的特殊性与多变性在客观上要求数据采集的方法一定要与之相匹配,即采样频率、系统增益以及偏置的选择和设置要具有可编程控制性和自适应性。数据采集方法是存储测试系统中的重要环节,它关系到信号获取的质量和测试系统的精度。
本文根据被测信号的特点、测试要求和测试环境等因素提出了采样策略的概念,分别从采样频率和系统增益两个角度进行深入的研究,并总结了应用于多个动态参数测试试验的采样策略实现方法,重点提出了自适应性采样策略的实现手段。
1 数据采集面临的问题
在实际应用中,采样周期TS决定了采样信号的质量和数量。TS太小,会使采样序列的数量剧增,从而占用大量的存储单元;TS太大,会使模拟信号的某些信息被丢失,出现失真现象,影响数据处理的精度。因此,必须合理选择采样周期,以确保使fS不失真地恢复原信号f(t),同时必须考虑存储容量的限制[2]。
125破甲弹引信的加速度曲线如图1所示。
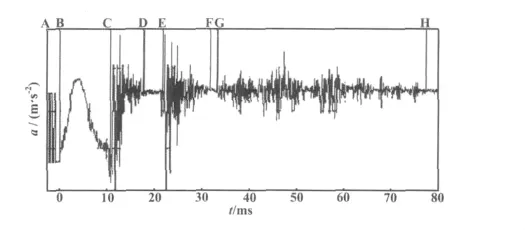
图1 加速度曲线Fig.1 The acceleration curve
在不同的时间段,实际测试时的被测信号有时变化快,有时变化慢,且信号幅值相差很大。因此,仅由信号的最高上限截止频率确定采样频率并采集某一物理过程不一定是最优的,有时甚至是不可行的;同时,在有些情况下无法采用单一采样频率对被测信号进行采集和记录。
由图1可以看出,测试数据全程按时间特征分为7段。BC段为膛内低增益过程,从C段开始是高增益,CD段为后效期,DE段为后效期后相对平静段,EF段为弹丸尾翼张开撞击弹体产生的作用期,FG段为尾翼第一次撞击后的相对平静期,G段以后为尾翼多次余振的作用期,H段以后弹丸飞行受到空气阻力平稳飞行。这7段数据的信号波形呈不规律变化,采集这类信号既要保证时间上的高分辨率,还要考虑到系统容量的有限性。
2 采样策略的原理
综合分析125破甲弹的加速度曲线后发现,弹丸从发射、出膛到飞行的整个过程存在膛内、出膛口、飞行3个环境。每个环境的状态都不一样,进入每个环境的采样规律也不一样。为达到最佳测试效果,根据被测对象运动规律及其变化而相应地采取或改变采样的规律,称为采样策略[3]。采样策略包括:系统增益、采样频率以及偏置电平等。正确的采样策略是实现新概念动态测试的关键技术。
根据实际测试情况,将采样策略分为5类。为了较好地说明采样策略,本文采用状态图进行描述。
2.1 单次单变采样
单次单变采样是指在一次测量过程中,采用固定的采样频率、系统增益、系统偏置的组合的采样方法。被测过程发生的时间相对随机,在信号到来前,测试装置一直不停地循环采样记录一部分存储器容量的数据。当信号达到一定幅度时,即停止采样记录。例如放入式电子测压器采样策略,其状态图如图2所示。
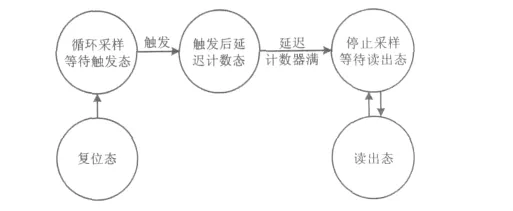
图2 单次单变采样策略状态图Fig.2 State diagram of the single univariate sampling strategy
2.2 单次多变采样
单次多变采样是指在一次采样过程中,采样频率及系统增益、偏置随被测过程的变化而按一定的规律变化的采样方法。发生的时间是相对随机的,由触发事件决定一次采样过程在适当的时间停止,由随后的触发事件或定时时间确定状态的转换。例如三环境破甲弹引信测试采样策略,其状态图如图3所示。

图3 单次多变采样策略状态图Fig.3 State diagram of the single multivariate sampling strategy
2.3 随机复合单次采样
随机的复合单次性采样是单次性采样的多次重复,一般是单次性单变采样过程随机发生的组合。每一次重复的发生时间是相对随机的,因此要靠每一个过程的触发事件来决定一次采样过程在适当的时间停止[4],例如引信运输碰撞试验采样策略设计。
2.4 复合多过程采样
复合多过程采样即工况过程采样,通常每个工况的记录起点不重要,由外部触发一次采样过程(或由定时启动一次采样过程),每个工况记录的存储器低位地址从0开始,存储器的高位地址表示记录的工况序号[5],例如坦克发动机、传动系统按工况过程测试。
2.5 多参量多变过程采样
多参量长时间单一(或多变)过程采样是黑匣子的特点。它需要记录的信号很多(可多达100路以上),而且记录时间长、数据量大;由导弹发射命令外部触发一次采样过程,记录起点的存储器地址从0地址开始;放置测试装置的空间相对较大,供电电源的容量相对较大;记录的是导弹飞行的状态信号(如陀螺状态信号、舵机状态信号等)和弹上计算机发出的命令[6]。测试装置对导弹系统的影响必需在规程规定的范围以内,一般采用单片机作为测试装置的控制器。
3 自适应性采样策略
由于测试目标信号的多样性,所以对于不同的测试对象必须设计不同的采样策略,这就使得测试系统的开发周期延长,同时也浪费了人力物力,并且使得电路的可靠性降低。在综合上述各种采样策略研制过程的基础上,研制出多种基于CPLD、SoC的专用集成电路(application specific integrated circuit,ASIC),这样就能针对不同的测试要求,配以传感器、适配电路、模数转换器和存贮器等测试部件,再经过简单的连接就可组成高性能的测试系统。
为了更灵活地适应各种测试要求,提出了自适应性采样策略的设计思路。同时,选用DSP等MCU作为核心控制芯片,制作测试系统的基本采样模块;根据实际测试要求即时更新DSP中的逻辑内容,以适应测试信号幅值的跳变性以及频率的多变性要求。
3.1 系统增益的自适应
为了满足对系统增益的自适应采样要求,需要在测试接口中加入增益可调的高精度放大器。由于现有集成程控增益放大器的可调增益范围有限,例如PGA103的可调增益只有1、10、100这3档,所以实际应用中很难满足使用要求。本文在现有的研究基础上提出的智能自适应采样策略,是将MCU主控芯片和程控增益放大电路结合起来,通过采集和控制电路来自动调整,智能化程度较高、可调增益范围较大。由于可调节的档位较多,所以输入信号的动态范围较宽。
3.1.1 系统结构
输入信号首先进入程控放大模块,放大倍数设定为1;然后由采集模块进行采集并由DSP作出判定。当DSP判定测试结果不满足采集模块的需求时,DSP将重新计算适合所采集数据的量程以及增益,并通过计算得到的放大倍数反馈调整程控放大模块的相应管脚。这样重复采集、判定直至满足系统增益的自适应采样要求。系统结构框图如图4所示。
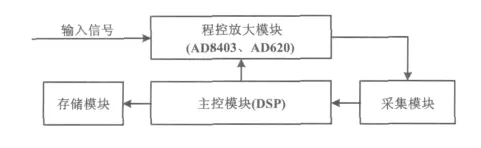
图4 系统结构框图Fig.4 Structure of the system
3.1.2 程控放大模块
程控放大电路由放大器AD620以及配合放大器使用的程控数字电位计AD8403组成,它将微弱的电

AD8403是四通道、256位、数字控制可变电阻(VR)器件,可实现与电位计或可变电阻相同的电子调整功能。AD8403内置4个可选的独立可变电阻(1 kΩ、10 kΩ、50 kΩ、100 kΩ),可提供 24 引脚 PDIP、SOIC和TSSOP这3种封装。其内置一个带游标触点的固定电阻,游标与固定电阻任一端点之间的电阻值,随传输至VR锁存器中的数字码呈线性变化。在A端与游标或B端与游标之间,各可变电阻提供一个完全可编程的电阻值。每个VR均有各自的VR锁存器,用来保存其编程电阻值[7]。这样,在DSP的16位数字信号控制下,电位器就具有自动改变滑动端与固定端之间阻值的功能,从而实现程控放大功能。
3.1.3 软件模块设计
设输入电压为 Vi、输出电压为 Vo、AD8403和AD620组成的程控增益放大器的放大倍数为G,则可以得出以下关系:

由式(1)和式(2)可得:

压信号进行放大,以满足采样系统的需求。AD620是一款高精度、低失调电压(最大50 μV)和低失调漂移(最大 0.6 μV/°C)的放大器,它还具有低噪声、低输入偏置电流和低功耗特性,专为满足可编程非标准增益要求而设计,是传感器接口等精密数据采集系统的理想之选。它仅需要增加一个增益调节电阻RG,便可配置成软件可编程增益放大器(SPGA)。将AD8403配置为SPGA的增益调节电阻RG,增益步进完全由用户根据实测需要选择。其放大倍数G与增益调节电阻RG的关系为:
当电压信号进入程控放大电路时,具体流程如下。
①将放大器的放大倍数设置为1,即原信号输入;
②由采集电路采集数据并由DSP对数据进行比对及计算,判断是否符合采集电路量程的要求;
③当不符合要求时,由DSP根据采集电路所测数据判断输入信号范围,并将放大电路的放大倍数进行调整,再重复第②步;
④对于经过重复调整符合采集电路量程要求的信号,通过采集模块完成模数转换存到存储器中;同时根据式(3)进行精确计算并以编码的形式将放大倍数及存储地址一同存到存储器中。这样数据采集完成后,根据存贮器中A/D转换的数据和相应的增益编码可精确还原出原被测信号。
主程序流程如图5所示。
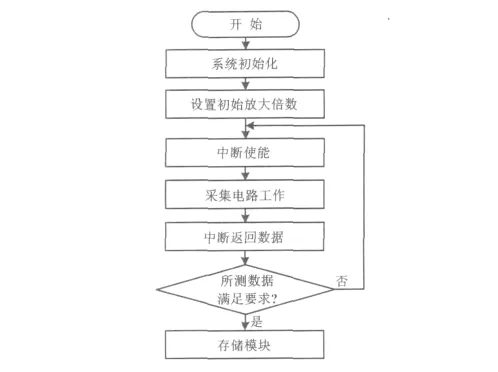
图5 主程序流程图Fig.5 Flowchart of the main program
3.2 采样频率的自适应
在实际采样过程中,常常遇到信号在某一段时间内变化快需高采样频率、在某一段时间内变化慢需低采样频率的状况。为了不丢失信号的细节,通常系统都全程采用较高的采样频率进行采样,但是这又与有限的系统存储资源相矛盾。因此,根据信号的变化率自适应地采取合适的采样率,可减少资源浪费。
采样频率自适应策略流程如图6所示。
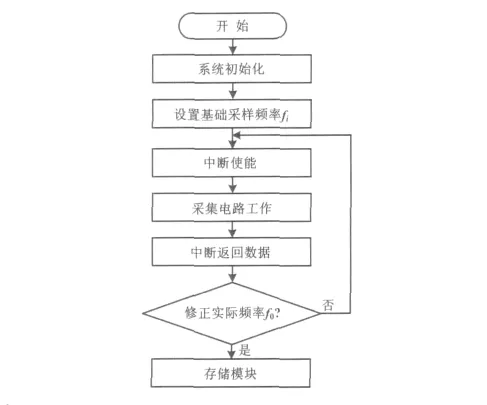
图6 采样频率自适应策略流程图Fig.6 Process of sampling frequency adaptive strategy
对于频率变化比较缓慢的信号,它在相邻的几个周期内的频率变化很小。因此,可以通过对其进行频谱分析,并采用软件算法得到信号的实际频率,然后用DSP实时计算后得到的实际频率自动调整、更新A/D的采样频率。这种方法为采样频率的自适应采样提供了一种思路。
本算法采用一定宽度的时间窗和基础采样频率采集一段信号,通过DSP实时地对该信号进行FFT运算;然后在频域内计算所采集信号的实际频率f0,并以此频率更新系统采样频率。通过重复这一过程不断修正采样频率,使系统的自适应采样策略得以实现。在实际应用中,采用DSP芯片TMS320VC5509,可将采样时间精确到5 ns。
需要说明的是,DSP是通过实时计算上一时间窗采样序列所确定的信号频率来修正本次ADC的采样频率,因此,本算法能被采用的前提必须是被测信号的频率在单位时间窗内不会发生大幅突变,否则将很难满足系统的实时性采集要求。对于爆炸冲击波等信号,本算法还存在许多亟需完善的地方。
4 结束语
根据存储测试的特殊要求,针对采样频率、系统增益等可调节因素的变化规律,研究总结了基于ASIC的多种采样策略实现方法,并重点提出了基于DSP主控芯片的自适应采样策略实现手段[8-11]。自适应性采样策略可使测试系统达到最佳测试效果。实测试验验证了该方案具有很强的存活性和可靠性,能适用于不同的动态存储测试。本文所探讨的存储测试是新概念存储测试的关键技术,对于通用复杂环境动态测试系统的研制具有指导意义。
[1]Zu Jing,Ma Tiehua,Pei Dongxing,et al.New concept dynamic test on ballistic parameters measurement[C]∥ 25th International Symposium on Ballistics,2010:92 -99.
[2]祖静,马铁华.动态测试技术的若干进展和展望[J].测试技术学报,2000(14):1 -6.
[3]李乐,祖静,裴东兴.基于专用ASIC的引信动态参数存储测试系统设计[J].电子测量技术,2007,30(5):158 -160.
[4]靳鸿,祖静.微型加速度测试仪的ASIC实现[J].仪器仪表学报,2006,27(z2):1530 -1531.
[5]陈柯勋,裴东兴.基于DSP的存储测试系统设计[J].数据采集与处理,2009,24(z1):302 -304.
[6]张凯,裴东兴.油井射孔压力测试系统采样策略的设计[J].计量与测试技术,2010,37(2):42 -43.
[7]陆祖良.周期信号采样测量策略[J].电测与仪表,2008,45(10):1-5.
[8]张泾周,杨伟静,张安祥.模糊自适应PID控制的研究及应用仿真[J].计算机仿真,2009,26(9):132 -135.
[9]蔡建国.冷藏集装箱在船舱装载情况下的散热优化研究[D].上海:上海海事大学,2006.
[10]戴冠秀,吴光林.风机采用变频调速的节能分析[J].能源与环境,2005(8):33 -35.
[11]王瑶,王晓晔.自适应模糊PID轧机厚度自动控制系统设计[J].电气传动,2008,38(8):56 -59.
