一种基于浓度的粒子群优化算法
2012-09-18李庆芳孙合明
李庆芳,孙合明
(河海大学理学院,南京 210098)
粒子群(PSO)算法起源于对简单社会系统的模拟。该算法是1995年由美国电气工程师Eberhard和社会心理学家 Kennedy[1-2]提出的。粒子群算法本质上是一种并行的全局性的随机搜索算法,具有容易实现、搜索速度快、优化性能好等优点[3-8]。该算法自提出以来,引起了国际上相关领域众多学者的关注和研究,并被广泛应用到神经网络训练、工业系统优化及控制[9-12]等领域。
作为一种进化算法,粒子群算法也有其缺点[13]。PSO算法是根据全体粒子和自身的搜索经验向着最优解的方向“飞行”,在进化后期所有的粒子都向“最优点”聚集,趋向同一化,群体的多样性逐渐丧失,致使算法后期的收敛速度明显变慢,甚至处于停滞状态,出现早熟现象。针对PSO算法的这个缺点,本文将免疫算法中基于浓度选择的概率引到PSO算法中,提出一种改进的粒子群算法。该算法根据浓度的大小对粒子的更新进行有选择的指导,从而在一定程度上加快了算法的收敛速度,增强了算法的寻优能力,同时对部分粒子进行初始化,增加种群多样性。实验结果表明,该算法具有较高的优化性能。
1 标准粒子群优化算法
在粒子群算法中,每个个体称为一个粒子,代表着解空间中一个潜在的解。例如,在一个D维的目标搜索空间中,每个粒子看成是空间内的一个点。设群体由m个粒子构成,zi=(zi1,zi2,…,zin)为第 i个粒子(i=1,2,…,m)的D维位置矢量。根据事先设定的适应值函数(与要解决的问题有关)计算zi当前的适应值,即可衡量粒子位置的优劣。vi=(vi1,vi2,…,vid,…,viD)为粒子 i的飞行速度,pi=(pi1,pi2,…,pid,…,piD)为粒子i迄今为止搜索到的最优位置,pg=(pg1,pg2,…,pgd,…,pgD)为整个粒子群迄今为止搜索到的最优位置。在每次迭代中,粒子根据式(1)、(2)更新速度和位置:

其中:i=1,2,…,m;d=1,2,…,D;k 是迭代次数;w是惯性权重;r1和r2为[0,1]的随机数;c1和c2为学习因子。式(1)的第2项是“认知”部分,代表了粒子对自身的学习,第3部分是“社会”部分,代表着粒子间的协作。式(1)表示粒子根据它上一次迭代的速度、当前位置和自身最好经验与群体最好经验之间的距离来更新速度,然后粒子根据式(2)飞向新的位置。
2 改进的粒子群优化算法
2.1 粒子群浓度的计算
浓度的概念来自人工免疫算法[14],这是近几年才提出来的一种模拟生物免疫系统的随机优化方法。在求解优化问题时,满足约束条件的最优解即是抗原,候选解即是抗体,抗体与抗原之间的亲和力反映了候选解和最优解得接近程度。为了实现抗体(粒子)的多样性和避免未成熟收敛,采用抗体生存期望值对抗体浓度进行促进和抑制。在种群更新过程中,总是希望适应度高的粒子被保留下来,但是如果此类粒子过于集中,即浓度过高,则很难保证粒子的多样性,很容易使算法陷入局部极优,而丢失那些适应度较差但却保持着较好进化趋势的粒子。因此采用基于浓度机制的多样性保持策略。第i个粒子的浓度[15]定义为

由式(3)可以推导出基于粒子浓度的概率选择公式:
其中xi和f( xi)分别表示第i个粒子及其适应度函数值。由式(4)知,与抗体i相似的抗体越多,抗体i被选中的概率就越小;反之,与抗体i相似度的抗体越少,抗体i被选中的概率就越大。这使得低适应度个体也可以获得进化的机会。因此,基于抗体浓度的概率选择公式在理论上保证了抗体的多样性。
3.2 粒子群的更新策略
当粒子进化到一定程度时,通过引入基于浓度选择的概率公式,避免粒子群陷入局部最优解。将所有粒子的概率按升序排列,排在前面的粒子浓度较高、概率较小,即在空间上该粒子处于较密集的位置,未避免粒子陷入局部最优。给其赋以较大的惯性权重,摆脱个体最优的影响,按照式(5)更新。

对于浓度较低但概率较大的粒子,根据免疫原理,笔者认为该粒子自身有着很好的进化前景,因此,粒子只受当前自身最优和其自身速度的影响,而忽略粒子的群体最优的作用,速度按照式(6)更新。

为了增加种群的多样性,对其余浓度处于中间位置的部分粒子重新初始化。
3.3 改进的粒子群算法描述
步骤1 初始化参数,确定种群大小N、最大迭代次数itermax、学习因子c1和c2,待求解的为问题维数D、区间长度。
步骤2 初始化种群,即随机产生各个粒子的初始位置和速度。
步骤3 根据目标函数评价每个粒子的适应度。
步骤4 对每个粒子,将其适应度与该粒子经过的个体极值比较,若较好,则将该位置作为当前的最好位置pbest,然后再与整个粒子群经历过的全局极值比较,若较好,则更新gbest。
步骤5 根据速度和位置公式(1)、(2)更新粒子的速度和位置。
步骤6 当种群进化到一定程度时出现停滞,按照式(3)、(4)计算粒子的浓度及概率,并按升序排列:① 选择排列在前个浓度较低的粒子,按式(5)更新速度;② 选择排列在后3个浓度较高的粒子,按式(6)更新速度;③ 其余的6个处于中间位置的粒子,重新初始化,随机赋值。
步骤7 计算更新后的粒子适应度,并更新自身最优解与全局最优位置。
步骤8 判断是否达到最大迭代次数。重复步骤4~6,最后输出全局最优解。
4 测试函数及结果
为测试改进的粒子群算法的性能,本文选择了5个著名的benchmark测试函数对该算法和标准PSO进行对比测试。
F1:著名的Sphere函数,它在xi=0时达到最小值0。

F2:Rosenbrock函数,也叫香蕉函数,一个经典的优化函数,在xi=1处达到全局最小值0。

F3:Rastrigin函数,有很多正弦凸起的局部极小点,在xi=0达到全局最小值0。

F4:Ackley函数,在xi=0时达到全局最小值0。
F5:Griewank函数,在xi=0时达到全局最小值0。
F1是一个连续的简单单模态函数,通常用来分析算法的执行性能。F2是一个经典复杂优化函数,它的全局最优点位于一个平滑狭长的抛物线形山谷内,由于函数仅仅为优化算法提供了少量信息,使算法很难辨别搜索方向,找到全局最小点的机会微乎其微,因此F2通常用来评价优化算法的执行效率。F3、F4是典型的具有大量局部最优点的复杂多峰函数,易使算法陷入局部最优,而不能得到全局最优解。F5是旋转不可分离的多峰函数,类似于 Rastrigin 函数[16]。
试验中 F1、F2、F4、F5的最大进化代数取500,F3的进化代数取1000,维数均取30维,学习因子 c1=c2=1.49445,惯性权重 w 从 0.9 到 0.4线性减少。为方便算法比较,适应值取以10为底的对数。运行结果见图1~5。

图1 F1:Sphere函数的适应度曲线

图2 F2:Rosenbrock函数的适应度曲线
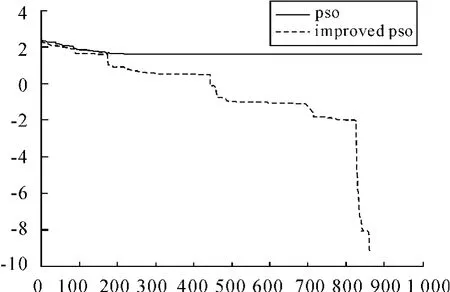
图3 F3:Rastrigin函数的适应度曲线

图4 F4:Ackley函数的适应度曲线

图5 F5:Griewank函数的适应度曲线
从图1~5的实验结果可以看出:改进的PSO比标准PSO有着更好的搜索性能;对于较易收敛的F1和F5,改进的PSO算法收敛速度明显加快,且收敛精度很高;尤其对于比较难于收敛的F3,改进的算法明显优于标准PSO;相对而言F2、F4虽然收敛速度差一些,但收敛精度要好于标准PSO。
5 结束语
标准粒子群算法由于群体的多样性在进化后期变差,从而导致收敛后期速度变慢,易陷于局部最优且收敛精度降低。改进的算法借鉴免疫学习中浓度的概念,按基于浓度的选择概率来指导粒子群的更新,使群体保持了很好的多样性,有效地避免了算法陷于局部最优。实验结果表明,该算法的搜索性能优于标准的粒子群算法。
[1]Kennedy J,Eberhart R.Particle swarm optimization[C]//IEEE Int’1 Conf On Neural Networks.Perth,Australia:[s.n.],1995:1942 -1948.
[2]Eberhart R,Kennedy J.A new optimizer using particle swarm theory[C]//Proc of the sixth international symposium on Micro Machine and Human Science.Nagoya,Japan:[s.n.],1995:39 -43.
[3]刘玉敏,俞重远,张建忠,等.粒子群优化算法用于光纤布拉格光栅综合问题的研究[J].激光杂志,2005(4):69-70.
[4]陈莉,张宏立.粒子群算法在六自由度并联机器人位置正解中的应用[J].重庆理工大学学报:自然科学版,2010(8):86 -90.
[5]王红玲,郑纲,何剑锋.基于改进粒子群算法的生鲜农产品配送路径优化研究[J].安徽农业科学,2010(31):17961-17962.
[6]徐传忠,王永初,杨冠鲁.模拟退火粒子群算法的Volterra主动噪声消除器[J].自动化与仪器仪表,2010(3):116-117.
[7]石玉秋,黄玲,曹乃文,等.基于粒子群算法的喷洒参数优化算法[J].安徽农业科学,2010(13):6677-6678.
[8]赵吉武,邹长武,卢晓宁.基于粒子群算法的综合暴雨强度公式[J].安徽农业科学,2010(30):17175-17176.
[9]郭志涛,袁金丽,张秀军,等.基于改进的 PSO神经网络的手写体汉字识别[J].河北工业大学学报,2007,36(4):65-69.
[10]宁国忠,孟科,颜学峰,等.改进的粒子群算法及其在软测量建模中的应用[J].华东理工大学学报:自然科学版,2007,33(3):400 -404.
[11]唐英干,刘冬,关新平.基于粒子群和二维 Otsu方法的快速图像分割[J].控制与决策,2007,22(2):202-205.
[12]杨晶东,洪炳镕,蔡则苏,等.基于粒子群优化的移动机器人全局定位算法[J].吉林大学学报:工学版,2007,37(6):1402 -1408.
[13]崔志华,曾建潮.微粒群优化算法[M].北京:科学出版社,2011.
[14]梁鸿生,郝勇娜,王凯等.免疫算法[J].昆明理工大学学报:理工版,2003,28(5):72 -76.
[15]Gang Lu,De-jian Tan.Improvement on regulating definition of antibody density of immume algorithm[C]//Proceedings of the 9thinternational conference on neural information processing(ICONIP 02).USA:[s.n.],2012:2669-2672.
[16]赫然,王永吉,王青,等.一种改进的自适应逃逸微粒群算法及实验分析[J].软件学报,2005,12(16):2036-2044.
