卡车ABS复合逻辑门限控制方法研究
2012-09-17李泉明龙永红
李泉明,龙永红,王 彬
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
0 引 言
汽车制动防抱死系统(anti-lock braking system,ABS)是一种应用广泛的汽车动力学电子控制装置,在汽车制动过程中,可以显著改善车辆的制动稳定性和可操作性,有效减少因紧急制动甩尾和前轮抱死不能转向而导致的交通事故[1]。国外经过几十年的理论研究和产业化生产,ABS技术已经相当成熟。国内ABS的研究起步相对较晚,但发展十分迅速,加之合资品牌汽车的推动,现在国内生产销售的乘用车几乎均标准配置ABS。但ABS在国内商用车市场上的安装率却一直较低,除了受车辆成本的影响外,ABS车型研发匹配周期长、量产成型的成品控制效果不理想,甚至产生制动力不足等情况,也是阻碍其在商用车上广泛应用的一个重要因素[2]。
针对以上问题,本文对传统卡车ABS控制器所采用的轮速、参考车速计算方法,根据对象特点进行了改进,提高了系统的轮速、参考车速计算的准确度。通过对传统逻辑门限控制算法的分析,结合实验数据改进形成一种复合逻辑门限控制方法,从而改善了原有算法逻辑复杂、门限值之间缺乏联系、易受干扰、车型匹配难度大等问题。
1 总体控制方案
ABS复合逻辑门限控制流程如图1所示,其控制过程如下:
1)控制器采集4路轮速信号,通过轮速信号计算出4个受控车轮的轮速。
2)通过特定的算法,根据4路轮速信号计算出车辆的参考车速,反映车辆整体运动速度。
3)根据计算得到的各个轮速和参考车速,计算得到4个受控车轮的滑移率和加速度。
4)根据各个车轮的滑移率、加速度,结合参考车速计算得到4个受控车轮的复合逻辑门限参数值。
5)判断车辆制动信号,如没有制动信号则结束本次循环,如果检测到制动信号则立即判断复合逻辑门限参数的值和滑移率是否在稳定区域内,如果在稳定区域内则结束该次循环,否则输出相应的控制动作。
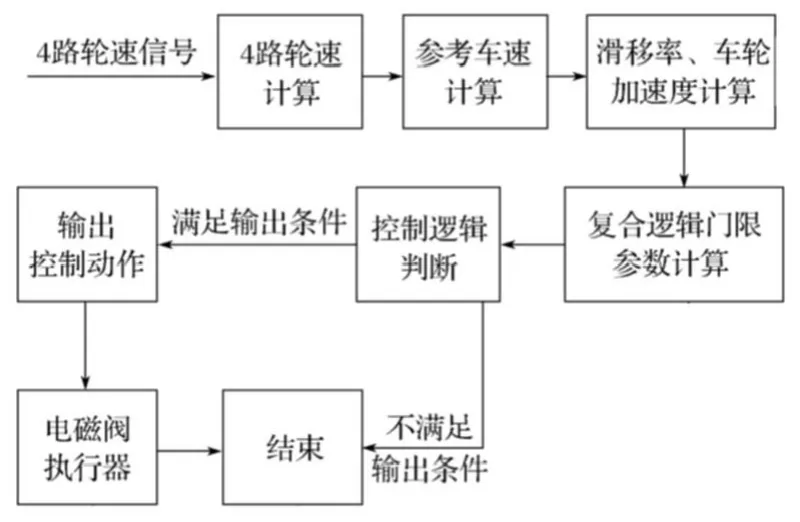
图1 ABS复合逻辑门限控制流程图Fig.1 Flowchart of ABS composite logic threshold control
在传统逻辑门限控制算法中,没有复合逻辑门限参数计算这一步骤,只根据与车轮加速度、减速度、滑移率等相关的5个门限值,以及多个时间常数进行控制规则判断。其优点是控制量直观存在、容易理解;缺点是逻辑复杂,5个参数与车型匹配起来难度较大,如果要做到适合各种制动工况,通常需要旷日持久的路况实验[3]。
综上所述,对逻辑门限算法的改进应该在保证控制效果的基础上,对复杂的逻辑门限进行缩减,增加传统算法门限值之间的联系,并且降低车型适配的难度,使得车型匹配简单,当一个门限出现异常时不会对控制效果产生明显影响。基于上述思路,本文对传统逻辑门限控制算法加以改进,形成了复合逻辑门限控制方法。该方法将与抱死趋势有关的多个参数整合为可反应抱死趋势的1个参数。当参数值过大时,表示抱死趋势明显应该减压;当该值过小时,表示没有明显抱死趋势可以继续增压;处于中间值时,表示制动压力可以继续保持。
轮速计算是整个控制系统的基础,结合国家标准以及车型性能的指标,要求能够准确计算15~120 km/h区间内的轮速。通常ABS轮速计算的方法有频率法和周期法。频率法在轮速较低时误差较大;周期法也存在抗干扰性差的缺点,特别是卡车工作环境较差,容易出现传感器齿圈损坏、沾有泥土等情况[4]。针对这些问题,本文在轮速计算时采用固定程序周期均值法,通过一个程序周期内的平均轮速来代表该周期所有时刻的轮速。该计算方法既能消除一定的干扰,也能满足卡车气压制动系统轮速计算的实时性要求。
参考车速的计算是滑移率计算的基础,也是ABS控制中的一个难点。在现有的主流卡车ABS控制器设计方案中,因成本原因没有加入速度传感器和加速度传感器,参考车速完全依靠轮速来计算。在实际应用中通常采用最大轮速值法、斜率法以及将2种方法融合的综合法。最大轮速值法是选用所采集到的多路轮速中的最大值作为轮速;斜率法是在确定制动初速度后,假设车辆以一定的斜率进行减速,计算出的假设值作为轮速值;综合法则选用最大值法和斜率法计算值的较大值作为车速[5]。为获取准确的轮速,在综合法基础上改进为斜率可调综合法来计算参考车速,该方法能根据不同的路面状态自动调节斜率,具有一定的路面辨识能力。
2 复合逻辑门限控制方法
2.1 轮速与参考车速计算
根据卡车的气压制动系统对实时性要求相对较低这一特点,轮速计算采用了以时间换精度的固定程序周期均值法,以求获得最准确的轮速计算值。
通过捕获轮速传感器脉冲并进行相应计算可以得到一个程序周期(20 ms)内轮速输入信号的平均周期,如图2所示。

图2 轮速计算原理图Fig.2 Schematic of wheel speed calculation
在1个20 ms程序周期内捕获上升沿4个,脉冲周期个数N=3,周期和为T=T1+T2+T3,因此输入信号平均周期为T/3,即车轮转过1个传感器齿间距的时间为T/3。在已知轮胎半径和轮速传感器齿圈齿数时,可计算得到对应1个传感器齿间距的轮胎转动的距离。
轮速计算公式为

式中:N0为轮速传感器齿圈齿数;
r为轮胎半径。
根据式(1)计算得到的轮速经过滤波校正后,可以反映轮胎转动速度。现有的设计方案在理论上可以计算6.08~120.00 km/h区间内的轮速,符合设计要求。
参考车速采用斜率可调综合法计算,在综合法的基础上,当制动开始时记录时间点,按照预设斜率开始计算速度值并与最大轮速值比较,选择2个数据中较大值为参考车速。当最大轮速值超过斜率值时记录此时的时间,计算该点到制动初始点的减速斜率,将计算得到的斜率值替换初始斜率,当最大轮速再次超过斜率值时继续更新斜率。实车实验数据见图3。
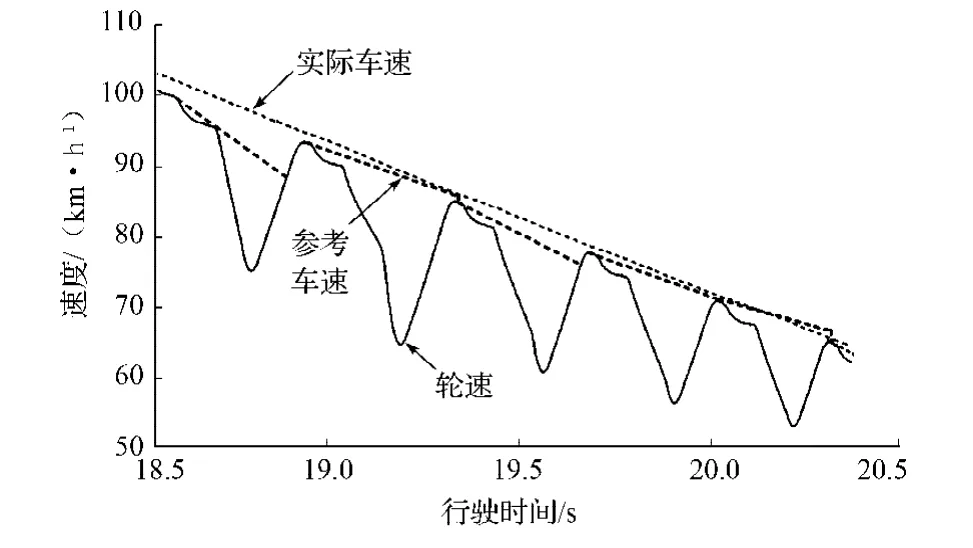
图3 斜率可调综合法实验效果图Fig.3 Experimental effect diagram for slope adjustable consolidation method
由图可知,参考车速斜率在不断的更新,计算得到的参考车速与实际车速虽有一定偏差,但明显优于综合法,可满足复合逻辑门限参数计算的要求。
2.2 复合门限参数的计算与逻辑判断
Bosch逻辑门限控制方法是传统逻辑门限控制方法中的一个典型代表,采用的门限值有5个,分别是车轮角减速度门限a1、车轮角加速度门限a2、车轮角加速度第二门限ak、参考滑移率第一门限S1和第二门限S2。ABS匹配实验的主要任务是调整以上5个门限值。制动气室的压力调节方式为增压、减压、保压、阶梯增减压,采用何种压力调整方式直接由门限值决定。
一个经典的Bosch逻辑门限控制循环的过程为:当制动压力升高时a1决定开始减压的时机,防止车轮抱死。为了避免ABS 刚介入制动调节时的不必要减压,让S1与a1共同起作用。如果在达到a1门限前,参考滑移率已经达到S1门限,这表明车轮已经进入不稳定滑移阶段,则直接减压。在减压阶段,当车轮减速度再次小于a1门限后转入保压。此时轮速继续回升,如果角加速度超过a2,则继续保压;如果在一定的时间内角加速度不能达到a2,则判断为低附着路面,进入阶梯减压调节;如果角加速度门限超过ak,则增加制动压力[2]。
通过对经典Bosch逻辑门限控制算法的分析可知,5个门限值中任何一个设置的不合理都可能导致制动抱死或者制动力偏低。由于5个门限值之间的联系较小,当一个门限值在一种情况下出现不匹配不能提供最好制动效果时,其他门限不能够提供反馈补偿,且车型匹配难度相对较大。在实际车辆匹配中往往需要花费大量的时间和财力[5]。针对以上问题,本文使用了复合逻辑门限参数作为主门限参数,滑移率作为第二门限参数。
复合逻辑门限参数是由多个反映轮胎抱死趋势的分离参数运算得到,用1个参数来表示轮胎的抱死趋势。根据Bosch逻辑和物理知识可知,车轮在减速过程中的加速度大小,可以反映轮胎的抱死趋势,越大说明抱死的趋势越明显。加速度是根据相邻程序周期轮速来计算,它表示本次状态和前一次状态的变化大小。滑移率可直接反应抱死趋势,但限制于车辆参考速度获取中存在的误差和干扰,使得ABS控制器计算得到滑移率与真实滑移率可能存在一定偏差,因此在主流的ABS控制算法中均将其作为辅助门限值。滑移率表示本次程序周期轮胎滑移状态,同样是数值越大表示抱死趋势越明显,因此,将滑移率δ和车轮加速度a乘以一定的权值后相加,得到一个新的参数

该参数的大小受滑移率和车轮加速度变化影响,当滑移率和车轮加速度中一个出现异常或者权值设定与特殊路面状态不匹配时,另外一个数据可以在一定程度上起到修正作用。通过权值匹配后的大量路面实验证明,参数p在中低速(10~55 km/h)时制动防抱死效果突出,但在高于55 km/h时容易产生制动力不足,并且随速度增加这种制动力不足现象越明显。由此可知,p值因车辆的高速运动出现了误差,过早达到抱死趋势门限从而引发了错误的保压或减压动作。因此p参数需要修改,考虑试验中参考车速对制动过程的影响,将p参数修改为

式中vr为参考车速。
通过初步理论计算以及实验匹配,式(3)中的p值可以反映抱死趋势,并且几乎不受速度变化的影响,称其为复合逻辑门限参数。该参数由3个控制器计算所得的参数乘以相应权值求和形成,使得多个参数联系在一起,当某个参数出现异常时,复合逻辑门限参数值受到的影响较小,参考车度作为一个负反馈来抵御高速行驶中的制动力不足现象。复合逻辑门限控制全过程原理如图4所示。
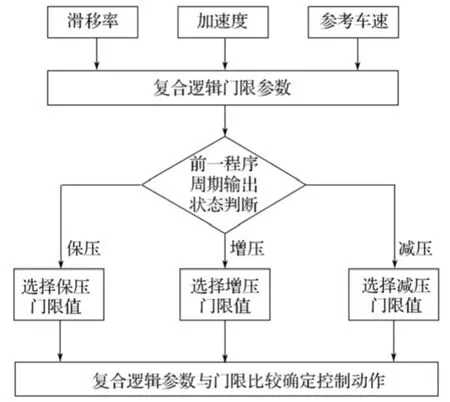
图4 复合逻辑门限控制方法原理图Fig.4 The schematic of composite logic threshold control method
在逻辑判断时,通过实验得到前一周期的保压、减压或加压情况下的复合逻辑门限参数减压值门限ph和保压值门限pl。这2个门限值将复合逻辑门限参数分为3个区间,当高于ph时减压,低于pl时增压,其余为保压。第二门限参数滑移率δ的判断逻辑为,当滑移率超过55%时保压,超过80%时进行减压,第二门限参数值只是在制动力过大,抱死趋势特别明显时介入控制过程,通常情况下仅以第一门限参数为逻辑判断标准。
3 实验结果
为检验采用复合逻辑门限参数控制方法的ABS控制器的控制效果,在陕西汽车集团有限责任公司生产的某型载重汽车上进行实验,并对该型车辆原装的ABS进行性能测定,以便与采用复合逻辑门限控制方法的自主设计产品进行比较。该型载重汽车使用的轮速传感器、电磁阀执行装置均符合实验要求。实验时,通过串口通信的方式,把自主设计的ABS控制器计算得到的4路轮速、参考车速发送给计算机来进行分析。在对该型车辆原装ABS进行实验分析时,将轮速传感器并联到自主设计的ABS控制器的轮速输入端,以获取该型车辆原装ABS控制器的轮速信息、参考车速信息。根据GB/T 13594—2003《机动车和挂车防抱制动性能和试验方法》以及GB 12676—1999《汽车制动系统结构、性能和试验方法》分析的主要数据见表1~3。

表1 40km/h初速度干燥柏油路面紧急制动数据Table1 The emergency braking data on dry asphalt surface at 40 km/h initial velocity
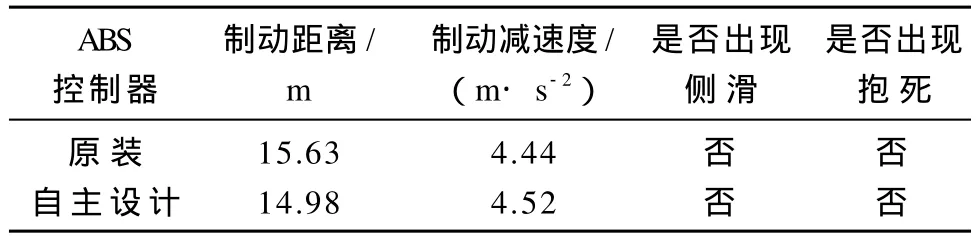
表2 50km/h初速度无积水泥泞路面紧急制动数据Table2 The emergency braking data on no water muddy road at 50 km/h initial velocity
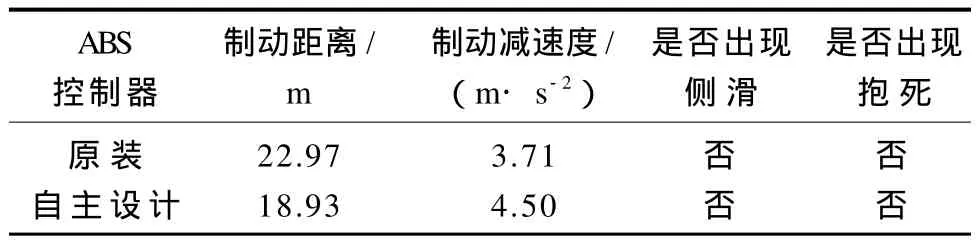
表3 60km/h初速度洒水柏油路面紧急制动数据Table3 The emergency braking data on watering asphalt road at 60 km/h initial velocity
干燥柏油路面的附着系数约为0.8,无积水泥泞路面的附着系数约为0.13,洒水柏油路面的附着系数约为0.56。以上实验数据表明,采用复合逻辑门限参数的ABS在制动过程中有防抱死效果,与原装产品相比,制动距离有明显缩短。在对开路面、对接路面实验效果也达到设计要求,符合国家有关标准[6-7]规定。
采用复合逻辑门限控制方法设计的ABS控制器简化了控制逻辑,缩短了车型匹配周期,该产品现已小批量生产试装,笔者和该项目团队将根据客户试用反馈的信息,对算法、硬件设计等继续进行优化改进。
4 结论
1)实验证明,采用复合逻辑门限控制方法设计的ABS控制器具有良好的制动防抱死效果,在各种路况下的控制效果均优于现阶段广泛应用的产品。
2)改进的轮速、参考车速计算方法满足控制器实时性要求,在精确度上有一定的提升。
3)车辆匹配工作得到了减少,节约了人力和物力,产品符合国家相关标准的要求,为产业化生产创造了条件。
[1] 张幽彤,陈宝江,翟 涌,等. 汽车电子技术原理及应用[M]. 北京:北京理工大学出版社,2006:190-222.Zhang Youtong,Chen Baojiang,Zhai Yong,et al. The Principle and Application of Automotive Electronic Technology[M]. Beijing:Beijing Institute of Technology Press,2006:190-222.
[2] 王伟达,丁能根,张 为,等. ABS逻辑门限值自调整控制方法研究与实验验证[J]. 机械工程学报,2010,46(22):90-95.Wang Weida,Ding Nenggen,Zhang Wei,et al. Research and Verification of the Logic Threshold Self-Adjusting Control Method for ABS[J]. Journal of Mechanical Engineering,2010,46(22):90-95.
[3] 李聚超. 乘用车的ABS逻辑门限控制与实验研究[D]. 吉林:吉林大学,2011.Li Juchao. Research and Experiment of ABS Logical Threshold Control for Passenger Vehicle[D]. Jilin:Jilin University,2011.
[4] 梅育庭. 汽车ABS性能检验的建模及半实物仿真[D]. 大连:大连理工大学,2006.Mei Yuting. The Modeling about the Appraisement of the Performance of the Automotive ABS and Semi-Practicality Simulation[D]. Dalian:Dalian University of Technology,2006.
[5] 吴诰珪,许 季,刘绍辉. 汽车防抱制动系统制动时的车速计算[J]. 华南理工大学学报:自然科学版,2002,30(2):76-78.Wu Gaogui,Xu Ji,Liu Shaohui. Calculation for Speed of Braking Vehicle with ABS[J]. Journal of South China University of Technology:Natural Science,2002,30(2):76-78.
[6] 中国汽车技术研究中心. GB/T 13594—2003机动车和挂车防抱制动性能和试验方法[S]. 北京:中国标准出版社,2003:15-23.China Automotive Technology & Research Center. GB/T 13594—2003 Antilock Braking Performance and Test Procedure for Vehicles and Trailers[S]. Beijing:China Standards Publishing House,2003:15-23.
[7] 中国汽车技术研究中心. GB 12676—1999汽车制动系统结构、性能和试验方法[S]. 北京:中国标准出版社,1999:25-40.China Automotive Technology & Research Center. GB 12676—1999 Automobile Braking System Structure,Performance and Test Methods[S]. Beijing:China Standards Publishing House,1999:25-40.
