一种新型空间构架式伸展臂的仿真与分析
2012-09-15汪俊亮谢溪凌陈定方
孙 科,汪俊亮,谢溪凌,陈定方
(武汉理工大学智能制造和控制研究所,湖北 武汉430063)
随着航天事业的发展,空间可展开支撑臂在航空领域的应用得到了普遍关注.空间可展开式支撑臂分为可存储管状伸展杆式支撑臂、伸缩套筒式支撑臂、充气刚化式支撑臂、整体张拉式支撑臂、构架式空间可展开支撑臂等5类,其中构架式空间可展开支撑臂具有收拢率小、承载能力强等优点,更能适应大尺寸和高强度的航天器发展趋向,是目前最为先进的可展开式支撑臂之一[1].
1 新型刚化原理
1.1 常见铰接式伸展臂的刚化原理
铰接式伸展臂由横向框架和纵向连接梁组成,两横向框架之间由柔性钢索连接.当伸展臂伸展到位之后,钢索处于拉伸状态,产生预紧力,整个单元刚化,单元之间叠加之后连接于空间飞行器使整个铰接式伸展臂处于超静定状态.
目前,索杆式刚化方式是铰接式伸展臂的常见方式[2].柔性钢索一般由两条定长钢、一条连续钢索组成.定长钢索连接对角锁定装置和横架处的铰点,连续钢索上固定一钢球.在伸展臂的伸展过程中,连续钢索拉动,钢球进入对角锁定装置的弹性卡槽内锁定.此时定长钢索和连续钢索都处于绷紧状态,产生预紧力,伸展臂处于超静定状态.
该方案采用的钢丝锁具有一定的柔性,易出现钢丝索缠绕、断裂现象,在航天器的工作环境中可靠性较差.
1.2 新型刚化处理
新型伸展臂整体图和局部图如图1所示.本文采用两个旋转副来代替球铰.纵梁和横架之间由一齿轮轴体连接,该齿轮轴嵌与横架之中,可绕中心轴转动,其和纵梁由一铰接相连.通过运动分析可知,铰接式盘压杆通过横架的旋转来实现伸展和压缩,而横架的旋转运动必然带来纵梁的扭转,纵梁的扭转又会促使齿轮轴进行旋转.通过每层齿轮轴实现联动,控制一端单元的横架转动可实现整体铰接式伸展臂的伸展运动.

图1 新型伸展臂整体和局部图
本文所采用的新型构架式伸展臂采用两个旋转自由度代替球铰的传动方式,避免了球铰带来的不可靠性.伸展臂采用齿轮传动实现每个单元的连动,控制末端单元的伸展状态即可轻松实现伸展臂整体的变化.齿轮传动不完全齿的限位功能可以实现伸展臂极限角度控制,确保系统工作的安全性.新型铰接接头见图2.
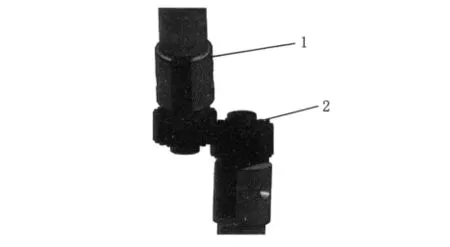
图2 新型铰接接头图
本结构采用刚体实现铰接式伸展臂的伸展控制,采用齿轮轴实现伸展联动,在航天环境中具有较强的可靠性.
2 新型盘压杆仿真分析
根据本文提出的新型刚化原理,采用Adams软件[3]对该构架式伸展臂的伸展原理进行动力学仿真验证.
首先在Solidworks软件中建立该构架式伸展臂的3d模型,然后通过软件接口导入动力学软件Adams中,对构架式伸展臂的运动特性进行分析.
在Adams环境下定义部件和运动副,然后对伸展臂收缩运动进行仿真,其具体环境和变量定义见图3.从图中可以看到伸展臂的铰接点的运动轨线呈一螺旋线性,验证伸展臂通过旋转横架来实现压缩的运动特性.

图3 ADAMS铰接接头运动轨线图
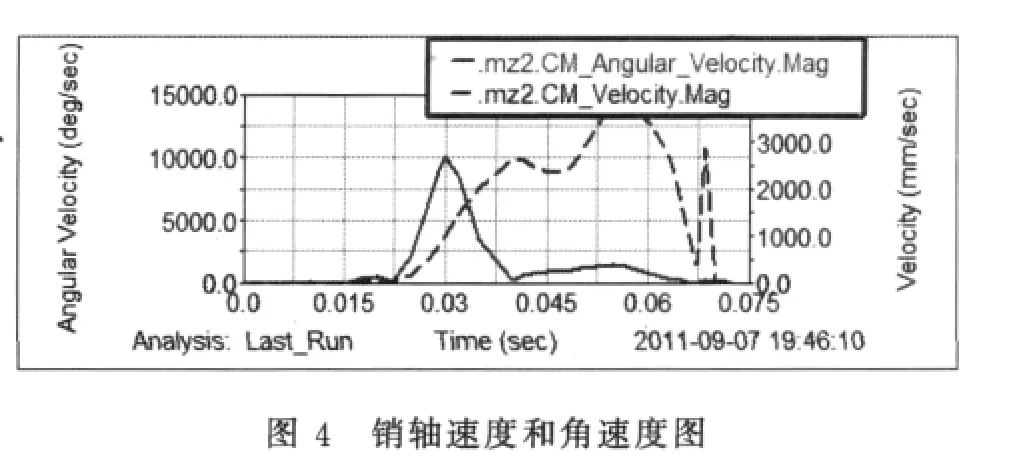
在伸展臂收缩的过程中,其铰接位置销轴的速度和角速度如图4所示.在其运动过程中角速度和速度都存在一定的突变,说明在整个运动过程中存在着一定的冲击.在伸展过程中销轴的运动轨线为螺旋曲线,其旋转角接近90°,高度为伸展臂单元伸展长度.其加速度和位置曲线见图5.

3 模态分析
通过模态分析可以得到伸展臂的自然频率及其振型.由于盘压杆机构工作在低频环境下,故选取模态分析的频段为0~50Hz.通过solidworks软件计算[4],在该频段内(3单元系统),系统前4阶模态见图6.
第一阶模态(频率为1.1961Hz)为末端单元相对首段单元横向移动模态.单元齿轮间隙晃动所激发.
第二阶模态(频率为7.2826Hz)为轴向伸缩模态.每单元轴向纵梁伸缩引起了较大的位移.
第三阶模态(频率为16.276Hz)为单元扭转模态.伸展臂每单元横架之间存在一定的扭转,从而出现一定变形.
第四阶模态(频率为16.701Hz)为横架窜动模态.伸展臂横架和齿轮间存在一定的窜动,会在伸展臂末端产生较大的位移,这是模态激发的原因.
通过模态分析可知,齿轮轴的间隙对整体震动影响较大,在设计制造过程中要严格保证其精度.
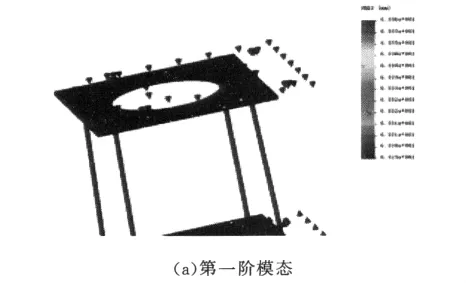
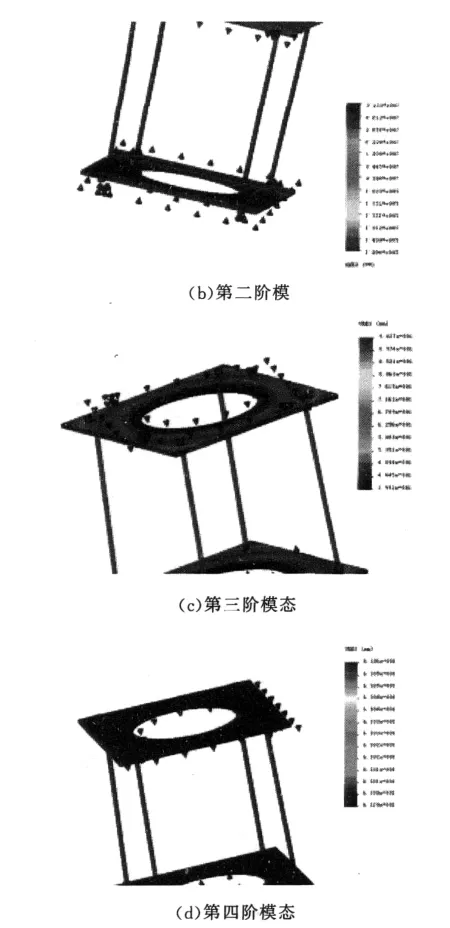
图6 前四阶系统模态振型
4 结束语
与传统伸展臂对比,该新型伸展臂具有以下优势:
1)采用两旋转自由度替代了了传统球铰,传动可靠,控制简单,制造方便;
2)设计齿轮轴实现联动和刚化锁紧,替代了原有索杆式刚化,伸展可靠,驱动简单.
综合来看,该新型伸展臂在伸展可靠性、控制难度上都有所提高,并能够实现原伸展臂的伸展运动特性.
[1]郭宏伟,刘荣强,邓宗全.空间索杆铰接式伸展臂性能参数分析与设计[J].北京航空航天大学学报.2008,34(10):1 186-1 190.
[2]苏 斌,关富玲.索杆式伸展臂的驱动展开设计与动力学分析[J].空间科学学报,2004,24(4):312-320.
[3]邱海飞.基于ADAMS的四连杆打纬机构动态设计与仿真[J].机械传动.2011,36(7):52-55.
[4]陈超祥,叶修梓.Solidworks高级教程简编[M].北京:机械工业出版社,2010.
