低附着路面的弯道制动控制策略研究*
2012-09-15郑太雄姜新杜
郑太雄,熊 壮,姜新杜
(重庆邮电大学 汽车电子与嵌入式系统研究所,重庆400065)
低附着路面的弯道制动控制策略研究*
郑太雄,熊 壮,姜新杜
(重庆邮电大学 汽车电子与嵌入式系统研究所,重庆400065)
为了解决车辆在低附着弯道路面制动中载荷转移造成的汽车失稳问题,建立7自由度整车模型。通过分析整车弯道制动过程的动态特性,推导出制动力与滑移率的关系,提出了纠正转向中车辆失稳的措施,设计了以滑移率为主的门限值控制方法。仿真验证了该方法能够有效提高制动稳定性。
弯道制动;低附着;门限值;滑移率;稳定性
汽车防抱死制动系统(ABS)在弯道工况工作时,需要考虑转向对稳定性造成的影响。为了提高汽车在弯道制动的稳定性,传统方法是通过制动减小离心力达到稳定车身的效果[1];通过分配车轮制动力或采用主动转向技术,实现对车辆稳定性控制[2-3]。但是,由于载荷转移造成车辆失稳导致转向制动过程中的稳定性不能得到有效解决。为此,本文从转向过程中的整车力学特性分析着手,研究转向与制动力之间的关系,综合传统方法,找出能够解决上述问题的控制策略。
1 车辆失稳的原因分析
1.1 车辆转向模型
考虑到汽车结构的复杂性,需要对其进行必要的简化:
(1)认为整车是由车身和4个轮胎组成,其中车身为一个刚体;
(2)忽略侧倾角对整车动力性能的影响;
(3)认为汽车的初始状态是在稳定圆周上匀速行驶。
以左转弯为例建立7自由度汽车转向模型,如图1所示。

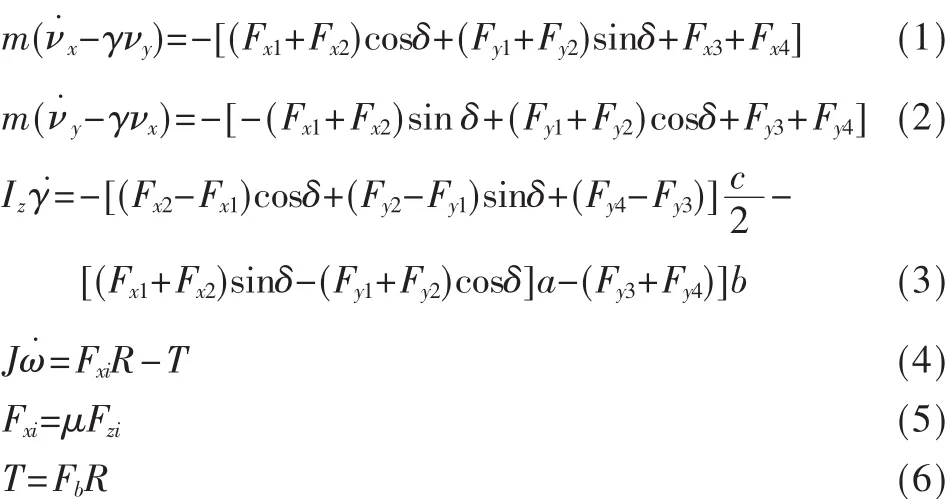
弯道制动时各车轮的垂直载荷:

式中m为整车质量,νx为车体的纵向车速,νy为车体的侧向车速,a、b为车辆重心离前、后轴距离,c为轮距,h为质心高度,δ为转向轮角度,ω为车轮角速度,γ为横摆角速度,Iz为车辆绕坐标o的转动惯量,J为车轮转动惯量,Fx(1,2,3,4)、Fy(1,2,3,4)为车轮对地的纵向和侧向力,Fzi为车轮载荷,T为制动力矩,μ为地面摩擦系数,Fb为制动力。
1.2 车辆失稳的原因
汽车转向过程中,由于前轮的侧偏角导致汽车产生侧向力,使得汽车产生横摆角速度,进而使后轮产生侧偏角和侧向力。在整个过程中,可能影响汽车稳定性的因素有:
(1)车轮抱死。根据单轮模型,为防止车轮抱死,制动器制动力必须小于地面给车轮的摩擦力[4]:

(2)离心力引起侧滑。车辆以速度Vx在半径为r的圆周上运动,一旦离心力大于轮胎
提供的侧向力Fy,就会造成车辆失稳。
(3)汽车在某些行驶工况下造成的过度转向。研究表明,转向不足的车辆具有一定高速稳定性,但一般情况下,车辆在弯道制动时会有向内侧偏转的趋势[5]。造成这种趋势的原因。是车辆制动时后轮载荷较大程度地向前轮转移,使得正向力矩大于反向力矩。
2 控制逻辑设计
2.1 方案分析
根据对弯道制动的动态特性分析,解决汽车稳定的关键在于设计合理的ABS算法,实现汽车在弯道路面的稳定控制。
当车辆在湿滑的弯道路面制动时,车辆更容易出现因车轮不能提供足够的侧向力而导致的侧滑现象。通过制动降低车速减小离心力,但制动力过大,车轮滑移率将会超过轮胎稳定性范围,车轮开始抱死,纵向力和侧向力都会急剧减小。因此,要将车轮滑移率控制在稳定范围内,防止车轮出现抱死。
由式(11)得到车轮不抱死的纵向最大制动力Fb1与垂直载荷的关系为:

根据附着椭圆关系:

保证车辆不侧滑的最大纵向制动力为:

因此,车辆在低附着弯道路面保证车辆不抱死或者侧滑的最大制动力为:

由式(4)、(6)可得 Fb与滑移率S的关系为:

变形后得:

变形后得:

因此,当车轮在相同初始状态下,制动力越大,车轮的滑移率也越大。
为避免转向过度,以左转弯制动为例分析弯道力矩,如图2所示。
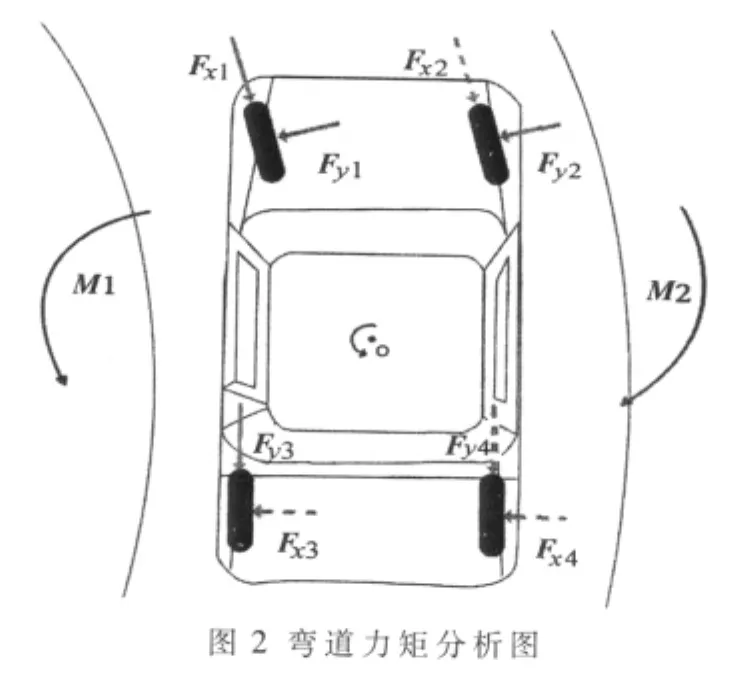
实线力产生的正向力矩为M1,虚线力产生的逆向力矩为M2。为了纠正汽车制动过程中的转向过度,可以通过减小正向力矩来实现。然而减小Fx1的同时会增加Fy1,从一定程度上抵消了减小Fx1产生的作用;而减小Fx3的同时会增加Fy3,进一步纠正了转向过度。因此减小Fx3是纠正转向过度最有效的方法。
为了满足对各车轮不同制动压力的控制,通过改进控制算法,采用以滑移率为主、轮加速度为辅的控制参数,针对参数设置合适的门限值完成对汽车的控制。
2.2 逻辑设计
根据制动压力、车轮速度和地面附着力的关系,将每个ABS控制循环分为增、减和保压3种状态,增压状态又包含阶梯增压,为了区别把内侧后轮定义为特殊轮,其余车轮为普通轮。
结合转向过程分析,设置 Sr、S0、S1、S2、S2S、S3、S47 个滑移率门限值,A2、A3、A3S3个加速度门限值。根据方案分析得到的结论可知门限值之间关系为:S1≥Sr>S2>S3>S2S,Sr>S0>S4,A2<A3<A3S。
控制策略流程如图3所示。

控制参数门限值如表1所示。

表1 控制参数含义
3 仿真结果
根据建立的数学模型,利用Simulink建模仿真。仿真车辆质量为6 750 kg,左右轮距2.05 m,质心至前轴的水平距离为2.26 m,质心至后轴的水平距离为3.24 m,车轮半径为0.62 m。车辆以45 km/h的初速度、转向轮5°,在摩擦系数为0.45的湿滑路面制动时进行仿真,仿真结果如图4所示。
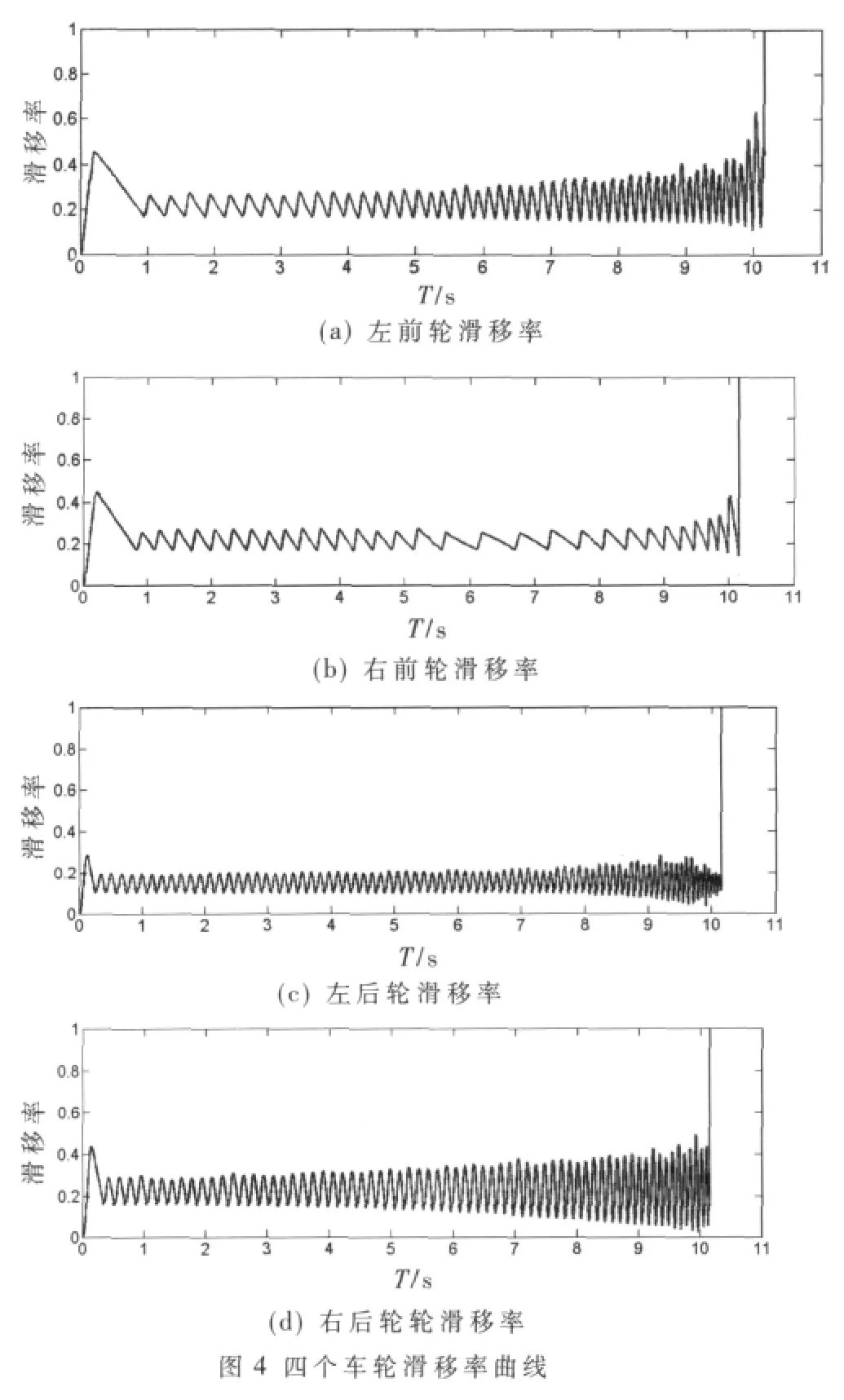
从图4可以看出,汽车除在制动初始阶段滑移率较大外,其他时间都较平稳,达到了预期的控制效果。图5对比了原ABS与改进控制算法的ABS在弯道制动中横摆角速度的情况。表明车辆在改进算法后,横摆角速度变化幅度明显变小,说明制动稳定性更好。

动力学仿真分析表明,本文采用控制方法改进ABS后,车辆在弯道制动过程中既避免了车轮抱死,又减小了车身的横摆角速度,增加了制动稳定性。
本文方法仅需获得轮速信号,即可在现有的ABS基础上通过改进算法就能得到理想的效果,具有一定的实用价值。
[1]吴义虎.低附着弯道路面车辆制动力控制策略研究[J].汽车工程,2009,31(2):157-160.
[2]柯为.商用车制动防抱死系统的弯道制动控制算法研究[D].吉林:吉林大学,2009.
[3]晏蔚光.基于主动转向技术的汽车制动稳定性控制[J].北京科技大学学报,2007,27(4):505-508.
[4]陆文昌.汽车防抱死制动系统性能的研究[J].中国安全科学学报,2005,15(10):65-68.
[5]张勇.基于主动制动的汽车稳定性控制系统开发研究[D].上海:上海交通大学,2007.
Research on vehicle curved braking control strategy for low adhesive road
Zheng Taixiong,Xiong Zhuang,Jiang Xindu
(Institute of Automotive Electronic and Embedded System,Chongqing University of Posts and Telecommunications,Chongqing 400065,China)
In order to solve the impact of wheel vertical load transfer,a dynamic model of 7 degrees freedom for an entire vehicle when curved braking on low adhesive road is established.The dynamics are analyzed and the relations between braking force and slip are derived.The measure of mending vehicle’s instability is proposed.The control strategy mainly based on the slip ratio threshold is designed.Simulation is done which verify the method is effective in improving the braking stability.
curved braking; low adhesive; logic threshold; slip ratio; stability
U463.5
A
0258-7998(2012)03-0127-03
国家自然科学基金(51005264);重庆市自然科学基金(2009BB3416);重庆高校创新团队建设计划(201014)
2011-11-16)
郑太雄,男,1974年生,教授,博士,主要研究方向:汽车电子。
