卫星激光测距系统中激光指向偏差测量的图像处理方法研究
2012-09-15王媛媛刘艳红胡元航张文娟王连明
王媛媛,刘艳红,胡元航,张文娟,王连明
(东北师范大学应用电子技术研究所,吉林 长春 130024)
卫星激光测距的实质是测量激光脉冲在地面观测站和测距目标之间的飞行时间.它是利用激光的单色性和相干性好、方向性强等特点,以实现高精度的计量和检测,如测量长度、距离、速度、角度等等[1-3].近几年,对激光图像的研究主要是边缘检测阶段.
边缘是指周围像素灰度的阶跃变化或屋顶状变化的那些像素的集合[4].传统的边缘检测如Roberts,Sobel,Prewitt,Kirsch,Laplacian和Canny边缘检测算子等,对噪声敏感,在实际图像处理中效果并不理想.为了能更好地解决实际问题,很多学者改善了边缘检测算法[5-6],但仍不能满足日益增长的需求.
由于卫星激光测距系统是全天24h工作,晚上背景与激光对比度很高,比较容易提取激光束的边缘,但白天背景太亮,激光束几乎不可见,即使晚上调整好光路,也可能因温度湿度变化等原因造成激光束的偏移,需要一种在白天同样也可以检测出激光束边缘的算法,基于CCD的白天激光光束监测方法符合这种需求[7].
以上方法在一定条件下可以检测出图像的边缘,但都不能得知图像的方向性.本文提出的矢量边界扫描法可弥补上述的不足.该方法不仅可以获取图像的边缘,还能够为后续处理提供数据,并且能判断激光束的方向.
1 图像预处理
本文对图像的处理步骤:(1)对图像进行预处理,利用滤波去除噪声;(2)用矢量边界扫描法提取激光束的边缘;(3)用直线拟合算法寻找激光束光尖坐标;(4)将光尖坐标与给定的卫星参考位置的偏差值返回给系统.
本文预处理的图像是白天获取的卫星激光图像(见图1).由于图像背景光较强、噪声大、图像对比度低,难于提取有用信息,于是先对图像进行预处理.首先,将彩色图像转换成灰度图像,以简化后续处理.其次,滤波处理[8].此时的图像是灰度图像,只需对图像中灰度值进行处理,因此,选用线性滤波.线性滤波的概念源于频域中信号处理的傅里叶变换.它是基于计算乘积之和操作的,即将邻域中每一个像素与相应的系数相乘,然后将乘积结果累加从而得到该点的响应.图像经过线性滤波相当于经过了一个二维的低通滤波器,虽然降低了噪声,同时也模糊了图像的边缘和细节.滤波过程中每次运算的范围叫掩膜,掩膜技术在去除噪声的同时还降低残留噪声的强度,圆形掩膜滤波能更好地保留图像边缘信息.线性空间的均值滤波对随机噪声的处理效果较好,圆形滤波窗口可以很好地保留激光束的边缘信息.于是本文选用了圆形掩膜的线性均值滤波.其滤波效果见图2和3,滤波后图像虽有些模糊,但激光束的边缘保留完整,模糊程度不影响后续处理.

图1 白天获取卫星激光图像

图2 对卫星激光图像滤波后图像
最后,用Otsu自适应阈值选取方法计算出最佳阈值,并用该阈值将图像二值化.经二值化后图像的效果如图4所示.

图3 圆形掩膜线性均值滤波后灰度3D图

图4 二值化后图像
2 图像边缘检测
2.1 矢量边界扫描法
矢量边界扫描法的基本思想:首先,从上下左右4个方向扫描图像,在上下扫描时,先固定列,逐行从上向下(从下向上)扫描图像,提取在每列上扫描时遇到的第一个灰度值为255的点的坐标值;在左右扫描时,先固定行,逐列从左向右(从右向左)扫描图像,提取在每行上扫描时遇到的第一个灰度值为255的点的坐标值;其次,对每个方向上扫描获取的坐标值进行直线拟合,得到4条直线,计算边缘数据与每条直线的误差,保留误差较小的2条直线为有效边缘;再次,重新选取有效边缘数据,用新数据拟合直线,这2条直线的交点坐标近似为激光束光尖坐标;最后,计算光尖与卫星参考位置之间的偏差值.
由于激光束射入视场的方向不确定,激光束可能从a-h任意方向射入视场中,如图5a所示.根据图5b获取图像的坐标系中激光束射入的8个方向,每次激光束射入视场中都会有2条亮边,图5b中标注的1和2表示2条边,若能将这2条边的坐标变化规律找到,就能推算出激光束的方向以及激光束光尖的坐标.8个方向上的激光束边缘坐标的数据变化规律见表1所示.

图5 矢量边界扫描
表1中“↑”表示沿坐标轴正方向坐标值逐渐增大,“↓”表示沿坐标轴正方向坐标值逐渐减小.由表1可以看出a-d 4个方向射入的激光束的坐标变化分别与其他4个方向射入的激光束的坐标变化规律相同,因此,矢量边界扫描法只需从4个方向扫描图像.

表1 边缘坐标变化规律
本文研究图像为BMP格式(规格203(像素)×248(像素))白天获取的图像,经过矢量边界扫描之后,描绘出图像的边缘见图6.图6中up扫描为从上向下扫描获得的图像边缘,left扫描为从左向右扫描获得的图像边缘,right扫描为从右向左扫描获得的图像边缘,down扫描为从下向上扫描获得的图像边缘.
2.2 直线拟合
获得图像边缘后,用最小二乘法进行直线拟合,效果如图7所示.由图7可见,每个方向上可以拟合成一条直线.由于一些点离直线很远,使拟合的直线误差很大,因此,本文进行了直线拟合后处理.

图6 矢量边界扫描法的边缘检测

图7 最小二乘法的直线拟合
为了进一步提高直线拟合的准确性,需要对拟合后的直线进行处理,使拟合的直线更准确的反应激光束的边缘信息.具体步骤为:
(1)计算每一条直线与对应边缘信息的均方差;
(2)保留均方差较小的2条直线;
(3)重新选取保留下来的2条直线的数据;
(4)用重整后的数据拟合直线;
(5)计算2条直线交点,即光尖坐标.
误差采用均方差的形式表示.在统计学中,均方差是对于无法观察的参数的一个估计函数,它是对误差函数的期望.选用均方差能反应直线拟合的准确性,均方差公式为

其中:yi=bxi+a;xi为每条边界坐标的i方向上获得的数值.一般的直线拟合的判断标准是误差越小越好,本文就是采用这一标准,均方差越小,直线拟合的准确性越高.
计算每个方向上拟合的直线的误差为eup=3.2,edown=356.0,eleft=12.0,eright=167.5.由图7可见,直线right和直线down的误差较大,这2条直线不能反映激光束的边缘,于是,删除这2条直线,只保留直线up和直线left,见图8.
在保留的2条直线上,激光束尖端和尾部的数据不能准确的反映激光束边缘信息,激光束前端光束细,图像处理后丢失的信息较多;后端光线较暗,丢失的信息也较多;只有中间部分可以较真实的反映激光束边缘信息.为更好地反映激光束边缘信息,需要重新选取激光束的边缘信息数据.
用修改后的激光束边缘数据重新拟合直线,效果见图9,直线up0和直线left0是用重新选取的数据拟合的直线,直线up0方程为yup0=1.265x+13.282,直线left0方程是yleft0=0.29524x+71.986,可以看出后者能更准确的反映数据表达的信息,直线误差变为eup=0.96,eleft=0.15.修改前后的误差详细对比见表2.可以明显地看出,改进后的直线拟合方法准确率提高了.由此可知,修改后得到的拟合直线能更准确的反映图像的信息.
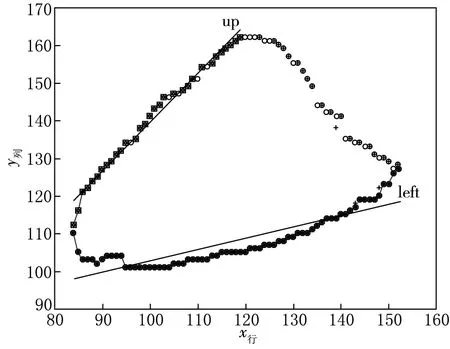
图8 保留的2条直线的拟合

图9 修改后的拟合处理结果

表2 2种直线拟合方法结果对比表
激光束光尖的坐标值即为直线up0和直线left0的交点位置,其交点坐标为(x,y)=(62.0,89.9),即激光束光尖坐标为(62.0,89.9).
2.3 偏差计算
图像的坐标和卫星监测系统要求的坐标不同,图10a为图像的坐标系,图10b为卫星监测系统要求的坐标系.
表2中的坐标值是在获取图像的坐标系计算得到的,而卫星观测站规定的坐标系为图10b所示,则可推出变换公式为:

其中(x,y)为已算出的坐标值,图像的大小i×j.用公式(2)计算光尖坐标为)=(-62.0,11.6).即激光束光尖与卫星参考位置的偏差值为(Δx,Δy)=(-62.0,11.6).

图10 图像和卫星监测的坐标系
3 结论
利用本文提出的矢量边界扫描法对卫星激光图像进行边缘提取和计算光尖坐标,取得了较好的实验结果.通过对激光束边缘的准确界定,可以计算出激光束光尖坐标,使激光束精确指向卫星.这种方法应用于实际系统,取得了较好的结果.
[1]王媛媛.图像处理在激光指向系统中的应用研究[D].长春:东北师范大学,2010:1-35.
[2]李祝莲,熊耀恒,何妙婵,等.云南天文台人造卫星激光测距系统原理[J].天文研究与技术,2008,5(3):248-253
[3]LI ZONGYANG,ZHANG YINGBAI,LIU HONGQIN.Laser time synchronization[J].Journal of Astronautic Metrology and Measurement,1987(1):52-57.
[4]刑卓异.基于图像的目标识别与跟踪方法研究[D].哈尔滨:哈尔滨工程大学,2007:1-130.
[5]王植,贺赛先.一种基于Canny理论的自适应边缘检测方法[J].中国图像图形学报,2004,9(8):957-963.
[6]孙明竹,赵新,卢桂章.基于Canny边缘检测的半盲图像复原算法[J].高技术通讯,2008,18(6):602-609.
[7]王斌,张忠萍,杨福民,等.一种基于CCD的白天激光光束的监测方法[J].中国科学院上海天文台年刊,2004(25):63-69.
[8]李蕴奇.基于小波变换的图像阈值去噪及其效果评估[J].东北师大学报:自然科学版,2012,44(1):60-66.
