直升机旋翼桨叶载荷标定新方法研究
2012-09-15韩玉旺朱光明陈功力
韩玉旺,朱光明,陈功力
(中航工业直升机设计研究所,江西景德镇 333001)
0 引言
旋翼是直升机最主要的部件之一,它既是唯一的升力来源,又是主要的飞行操作面。旋翼载荷显然影响着直升机的性能和飞行品质,同时也是直升机其他部件载荷的主要来源。从动力学与强度的观点出发,旋翼载荷的计算直接关系到旋翼这一部件本身的寿命,关系到整个直升机的安全性、可靠性及寿命[1]。因此,直升机飞行载荷测量的准确性就显得至关重要。
过去,我国直升机产业比较落后,直升机技术基础比较薄弱,对旋翼载荷的标定方法没有特别的研究。随着科学技术的不断发展和新型材料的不断问世,先进复合材料在直升机桨叶上应用越来越多,桨叶上的载荷分布情况越来越不明确,因此,测量确定桨叶剖面载荷分布就显得非常重要。
桨叶标定是直升机旋翼载荷实测前一个非常重要的环节,通过静态直接加载,对桨叶进行全尺寸标定,最终得出挥舞弯矩、摆振弯矩、扭转弯矩载荷工程量的转换关系。
以往桨叶载荷标定方法的不足:
1)没有标定桨叶预扭角,使用理论计算预钮角;
2)标定时没有消除挥舞对摆振的耦合影响,未能得出挥舞和摆振相互耦合系数,需要在实测数据处理时通过耦合矩阵计算,对测量数据提取、分离,消除挥舞对摆振的耦合。这种方法不仅计算量大,而且计算出的各剖面摆振弯矩误差比较大。
本文提出了一种新的直升机旋翼桨叶载荷标定方法,在标定时找出桨叶的实际预扭角,有效消除了挥舞对摆振的耦合影响,减少了摆振弯矩的误差,提高了旋翼载荷数据处理效率。由于桨叶的三种弯矩载荷(挥舞弯矩、摆振弯矩和扭转弯矩)中只有挥舞弯矩对摆振弯矩的输出影响较大,因此,本文重点介绍挥舞/摆振的解耦方法和标定方法。
1 桨叶贴片
直升机桨叶载荷测量主要有挥舞弯矩、摆振弯矩和扭转弯矩测量。测量挥舞弯矩的应变片粘贴在中心线的上下表面,并排对称平行组成全桥。图1为某直升机旋翼桨叶各剖面贴片位置示意图,图2为某剖面应变片桥路组合示意图。

图1 主桨叶各剖面贴片位置示意图

图2 某剖面应变片桥路组合示意图
这种应变片组桥方式可有效消除径向拉伸和压缩载荷的影响,并具有温度补偿功能[3]。测量摆振弯矩的应变片组桥方法和桥路组合与挥舞弯矩测量一样,也粘贴在旋翼桨叶上下表面,并排平行组成全桥。为了提高挥舞/摆振解耦的效率,可多粘贴一到两个摆振弯矩应变片(摆振片ε5,摆振片ε6),见图2所示。
2 确定预扭角
直升机的主桨叶和尾桨叶都存在结构预扭角,即各剖面的最大刚度面(即摆振面)和最小刚度面(即挥舞面)之间存在一个夹角。各剖面的摆振面或挥舞面相对于桨叶0剖面的摆振面或挥舞面的夹角称之为各剖面的“预扭角”[2]。桨叶的预扭角的大小在桨叶的理论外形图上有标注。但是,理论预扭角与实际预扭角有所差异,这就需要在桨叶载荷标定时确定各剖面的预扭角。
根据桨叶理论外形图查看各剖面的理论预扭角的范围,确定输入的角度及量级(一般量级为2°~3°)。例如,某直升机旋翼载荷试飞主桨叶标定剖面6个,分别是200剖面、1400剖面、2810剖面、3705剖面、4430剖面、5570剖面,旋翼桨叶理论外形图确定各剖面的理论预扭角的范围是 0.16°~10.79°,标定时输入角度为-1°~14°,量级3°,分六级。通过专用的桨根接头夹具将主桨叶安装固定在分度盘上,并利用翼形夹具进行加载,分别测量记录桨根平面与水平面成 -1°、2°、5°、8°、11°、14°时各个剖面的挥舞全桥电压输出,如表1所示。对表1中的得到的角度-剖面进行线性拟合,如图3所示。此时,当挥舞输出变化为0时所对应的角度即为该剖面的预扭角。各剖面的标定预扭角如表2所示。
理论预扭角和实际标定预扭角存在一定的误差,如表3所示,误差的原因在此不再详细阐述。
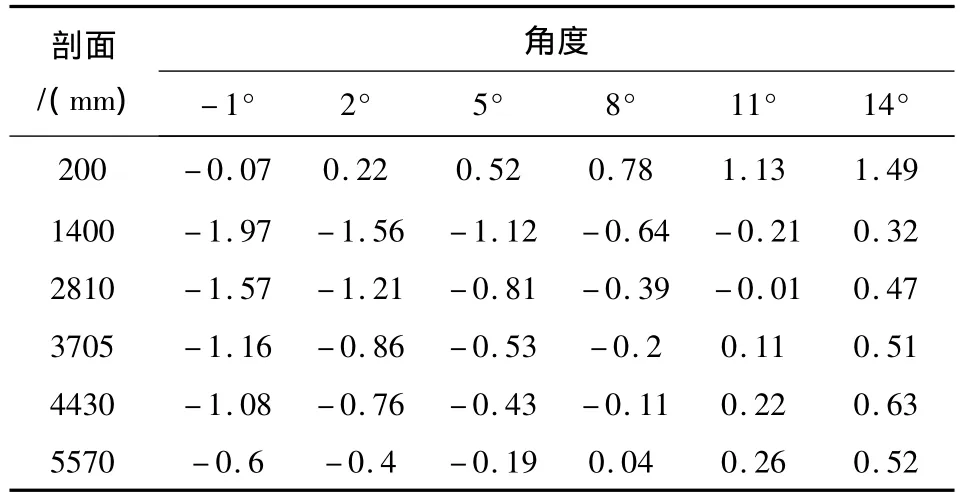
表1 各剖面挥舞输出变化(单位:mv)
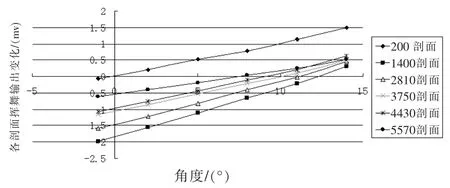
图3 各剖面挥舞输出-各角度的线性关系

表2 各剖面的实际标定预扭角

表3 理论预扭角和实际标定预扭角误差
3 加载标定
首先要确定标定载荷的大小,这是一项很复杂的工作,对于新设计的构件通常是通过“有限元建模”进行数值分析计算,根据材料性能强度试推算出该结构理论上的最大承载能力和应力分布情况,进而得出合理的标定载荷和加载点[4]。虽然标定载荷不是结构的真实工作载荷,但也应具有一定的代表性,这样获得的标定系数才更能反映真实受载状况。一般情况下,桨叶标定载荷按10%一级分五级进行逐级加载。为了抵消旋翼桨叶变形的不连续性和对小载荷的不敏感性等因素的影响,标定前要预加载到标定的最大载荷,再从10%开始分五级进行逐级加载,每种情况至少重复3次,保证试验数据的线性和重复性。
3.1 挥舞/摆振解耦组桥
如前所述,用以往的方法(标定时没有消除挥舞对摆振的耦合)在桨叶载荷实测时不仅计算量大,而且计算出的各剖面的摆振弯矩误差也比较大。鉴于以往方法的不足,在此介绍一种在桨叶载荷标定时消除挥舞对摆振的耦合的方法(挥舞/摆振解耦处理方法)。
以主桨叶1400剖面为例,介绍挥舞/摆振解耦的方法及过程。桨叶在挥舞状态下,将旋转分度盘(安装桨叶的夹具)的角度调整为1400剖面的预扭角(11.173°)。此时,加载方向与桨叶被测剖面的弦线垂直,测量零位和最大加载载荷时摆振片的输出如表4所示。同理,桨叶在摆振状态下,将旋转分度盘(安装桨叶的夹具)的角度调整为1400剖面的预扭角(11.173°)。此时,加载方向与桨叶被测剖面的弦线平行,测量零位和最大加载载荷时摆振片的输出如表4所示。
如果表4中相对耦合系数<3%,则消除了挥舞对摆振的耦合,如 ε1,ε2,ε3,ε4,组合的相对耦合系数为1.71%,满足<3%的要求,因此2810剖面摆振就用 ε1,ε2,ε3,ε4应变片组合即可。反之,如果表4中相对耦合系数≥3%,则说明没有消除挥舞对摆振的耦合,应选择相对耦合系数接近3%的组合来调整某个应变片的位置(调整的具体位置要根据计算结果确定),重新粘贴应变片组桥,重复以上解耦步骤,直到消除挥舞对摆振的耦合(相对耦合系数 <3%)。
3.2 标定
消除每个剖面挥舞对摆振的耦合后,按照标定步骤和事先确定的加载位置和加载级别对各剖面进行挥舞、摆振和扭矩的标定。在标定挥舞弯矩的同时监测该剖面的摆振弯矩随加载载荷变化的输出变化情况,进而验证解耦的准确性。以某直升机旋翼桨叶1400剖面挥舞弯矩和摆振弯矩为例,挥舞弯矩如表5所示,摆振弯矩如表6所示。加载挥舞弯矩与挥舞输出电压和加载摆振弯矩与摆振输出电压的拟合方程,分别如图4、图5所示。

表4 1400剖面挥舞/摆振解耦数据(单位:με)

表5 挥舞1400剖面标定数据

表6 摆振1400剖面标定数据

图4 挥舞1400弯矩与电压Mb~V关系曲线图

图5 摆振1400弯矩与电压Mb~V关系曲线图
4 结论
此直升机旋翼桨叶载荷标定方法在某直升机载荷测试中得到了全面应用,载荷测试结果证明此方法是科学、高效的。
通过此方法给出的标定载荷方程,可变换得到直升机在飞行过程中更为精确的实测旋翼桨叶的挥舞弯矩、摆振弯矩和扭矩弯矩的载荷时间历程数据,为整个直升机在实际飞行过程中的载荷计算、载荷谱编制、旋翼各部件的损伤情况、旋翼桨叶部件的定寿提供更加精准的飞行载荷实测数据。
[M].北京:航空工业出版社,1991.
[2]余询.一种高效的桨叶载荷标定方法[J].直升机技术,2001(2):18.
[3]刘正江,陈焕,等.模型桨叶标定技术研究[J].直升机技术,2009(3).
[4]刘守慎.旋翼桨叶载荷确定技术[C].CHS-05,1989:443~452.
