光伏并网电站智能监控系统的设计与实现
2012-09-10叶琴瑜胡天友
叶琴瑜 胡天友 秦 文
(电子技术大学机械电子工程学院,四川 成都 611731)
0 引言
随着太阳能光伏发电技术的不断成熟与普及,太阳能光伏发电正逐步由特殊应用转向民用、由辅助能源向基础能源过渡,而光伏并网发电系统是光伏系统发展的必然趋势[1]。光伏并网发电系统一般由太阳能光伏电池板、逆变器以及控制器这几部分组成。为了实时监测光伏并网电站设备的运行状态,并保证每部分器件均能正常运行,就需要对相应参数进行测量、保存和分析。
目前,光伏并网电站采用的监控技术比较落后。光伏并网电站普遍采用以单片机为主的控制单元、以RS-485总线为主的通信网络以及采用价格高且通用性较差的组态软件为上位机监测系统。因此,在完成光伏并网电站建设的同时,如何提高电站监控系统的性能及智能化水平,具有非常重要的研究价值。
1 系统的总体结构与功能
光伏并网电站监控系统主要由上位机、下位机DSP、前端传感器采集模块及CAN总线等部分组成。系统结构如图1所示。

图1 系统结构框图Fig.1 Structure of the system
系统各模块具体功能如下。
①上位机主要由计算机、CAN接口卡和监控软件组成。CAN接口卡插在上位机的扩展槽上,实现下位机与上位机之间的高速数据交换;监控软件通过CAN接口卡接收下位机控制器发送的数据,对其进行分析、存储和显示,并根据需要向下位机发送控制命令[2],达到实时监测、控制的目的。
②下位机DSP主要负责A/D采样,并以CAN协议与上位机进行通信,保证系统的可靠稳定运行。
③前端采集模块主要由各种传感器组成,负责采集每台逆变器的直流电压、直流电流,交流侧三相并网电压、电流,逆变器温度等运行参数和环境参数(温度、风速、日照强度等)。
2 硬件设计
光伏并网电站监控系统对数据采集的精度、数据采样率都有一定要求,需要能够实时监测设备运行状态,以达到遥控、遥测的目的。更最重要的是,该系统需具有较高的稳定性和可靠性。
目前,在光伏电站监控系统中,广泛使用的控制单元主要以单片机为主。与新型的数字化处理器相比,该类控制器性能、扩展性和实时性都较差,对智能控制也有一定的局限性。因此,本监控系统采用TI公司的DSP芯片TMS320F2407作为系统核心控制器,充分利用了DSP的高速数据处理能力和强大的输入输出、采样、通信等外围接口功能[3]。该控制芯片主要负责现场运行参数的检测和数据采集,并对采集的数据进行处理和通信。系统硬件电路主要由CAN总线接口电路和采样电路组成。
2.1 CAN总线接口电路设计
与目前在光伏监控系统中使用最多的RS-485相比,CAN总线具有极高的可靠性、实时性和抗干扰性。该总线为工业控制系统中高可靠的数据传送提供了一种全新的解决方案。
本控制芯片TMS320F2407内嵌的CAN模块集成了CAN控制器,提供了完整的CAN2.0B协议,减少了微处理器的开销,仅需要外置收发装置即可实现通信[4]。在此采用德州仪器公司生产的 SN65HVD230作为CAN收发器。该收发器具有差分收发的能力,最高速率可达1 Mbit/s。选用SN65HVD230收发器可以实现增大通信距离、提高系统的瞬间抗干扰能力、保护总线、降低射频干扰(RFI)、允许挂接120个节点以及热防护等[5]功能。CAN总线接口电路如图2所示。
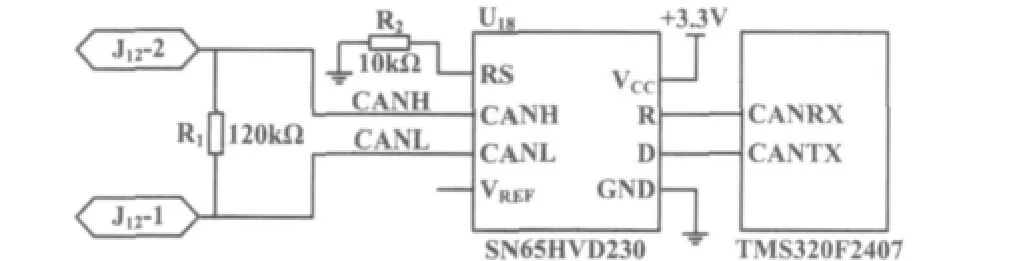
图2 CAN总线接口电路Fig.2 Interface circuit of CAN bus
图2中,电阻R1作为CAN终端的匹配电阻;SN65HVD230的方式选择端口RS与一端接地的斜率电阻器R2连接,可实现高速、斜率控制和低功耗3种工作模式的选择。考虑到系统成本,同时,为了减少因电平快速上升而引起的电磁干扰等问题,本接口电路选择斜率控制方式。
该系统的硬件设计采用通信速度快、抗电磁干扰能力强的CAN总线技术,提高了系统通信的稳定性、实时性和工作效率,并且减少了系统的布线和负载。同时,将TI公司生产的3.3 V CAN总线收发器SN65HVD230与带有CAN控制器的TMS320LF2407配套使用,实现了系统内部各单元之间的信号传送。
2.2 数据采集电路设计
由于本系统需要测量的参数种类繁多,因此,首先根据需要选择不同的传感器,通过调理电路进行滤波和限幅;然后将数据送到DSP进行A/D转换,将模拟量转换为数字量;最后再将这些处理过的参数送入计算机。数据采集系统框图如图3所示。

图3 数据采集系统框图Fig.3 The block diagram of data acquisition system
系统DSP选择德州仪器公司(TI)推出的TMS320LF2407,其不但具有TMS320系列DSP的基本功能,还具有以下一些特点[6]:①采用高性能静态CMOS技术,使得供电电压降为3.3 V,减少了控制器的功耗;②片内有高达32 kB×16位的Flash程序存储器、高达1.5 kB的数据/程序 RAM、544 B双口 RAM(DARAM)和2 kB的单口RAM(SARAM);③2个事件管理模块EVA和EAB,每个模块均包括2个16位通用定时器和8个16位PWM通道;④10位ADC转换器最小转换时间为500 ns,多种A/D触发方式(软件启动、EVA和EVB、外部触发ADCSOC);⑤5个外部中断(2个电机驱动保护、1个复位和2个可屏蔽中断);⑥3种低功耗电源管理模式,能独立将外设器件转入低功耗工作模式。
采用高速数字信号处理器TMS320LF2407进行数据采集,使得系统在采集速度、精度和同步采样等方面都具有良好的性能,且结构简单、成本低。
3 软件设计
3.1 上位机监控软件
目前,很多工业监控系统都采用组态软件,但组态软件价格较高,且大都不能脱离其特定的环境运行,而Visual C++、Dephi等早期软件在类型安全、简单、灵活和面向对象等方面都存在不足。因此,本监控软件采用.NET框架的Visual C#.NET为开发平台进行界面设计,可以大幅度缩短软件开发周期[7-11]。在运用Visual C#.NET进行上位机软件开发的过程中,为实现CAN总线通信功能,利用PCI-9820双路非智能CAN接口卡厂商提供的工具包。上位机将接收到的数据处理后存入SQL Server 2005数据库中。
监控软件的主要目的是对光伏并网发电站的众多逆变器、光伏阵列的状态进行实时监测、控制和管理[8],其实现的功能主要有以下几点。
①数据采集和显示功能:实时采集每台逆变器的直流电压、直流电流,交流侧三相并网电压、电流,逆变器温度等运行参数和环境参数(温度、风速、日照强度等);并计算出每台逆变器的当前发电功率,电站的发电功率、平均功率,日发电量、累计发电量以及CO2的减排量,并将它们进行显示[9]。
②数据管理:每隔5 min存储一次电站所有运行数据和环境数据,故障数据实时存储,数据备份、查询,报表打印等。
③控制功能:控制下位机逆变器的开和关,可以以电子表格的形式存储运行数据,并可以通过图表的形式显示电站的运行情况。
④故障报警功能:当设备出现故障时立即弹出报警提示信息,同时,以SMS(短信)方式通知电站管理人员。
⑤操作日志:跟踪用户对系统的各种数据操作和使用情况,主要用来记录系统中的异常信息以及用户权限的更改等,便于用户或者程序员发现错误信息并及时进行调整、修改。
3.2 CAN通信协议设计
TMS320LF2407内置的CAN控制器完全支持CAN2.0B协议。该协议规范标准只规定了物理层和数据链路层,并没有规定应用层。所以在设计通信软件时,必须首先设计合适的CAN通信协议,才能准确可靠地传输数据。F2407的CAN控制器支持2种不同的帧格式,即标准格式和扩展格式。它们的主要区别在于标志符长度的不同,标准帧具有11位标志符,而扩展帧具有29位标志符。
考虑到通信的可靠性和效率,本系统采用标准格式数据帧,通信速率最高可达500 kbit/s[6]。CAN标准信息帧如图4所示。在实际的编程应用中,比较重要的有仲裁域、控制域和数据域。本文主要对仲裁域和数据域进行了设计。

图4 CAN标准信息帧Fig.4 Standard information frame of CAN
本应用层协议对CAN2.0标准帧的11位标志符采用了报文优先级分配原则,每一帧报文标志符的最高4位表示报文的功能码,数据越小,则优先级越高[10],后面7位表示节点的地址。例如:上位机对总线具有最高优先权,标志符可以是0000 0000000;各下位机控制器优先权低于上位机,标志符可以是0001 0000001,0001 0000010,…,依次进行编号,在一个局域网内可以容纳多达127个控制器节点。采用该方法,即可实现PC机与多台并网逆变器之间的通信。最后,明确各节点需要发送的报文,对监控系统中各种控制信号和数据进行分类,填充各报文的数据域。
下位机向上位机发送数据帧的具体定义如表1所示,最后一帧的结束标志格式为:NOD-ID(下位机节点ID,即标志符的0~6位)+FF FF FF。下位机以2 s为一个周期向上位机连续发送6组数据帧,如果上位机连续接收到6组数据并且最后3字节包含FF FF FF,则认为数据接收成功;否则丢弃数据。最后,通过读取最后一组数据中的NOD-ID获取发送节点的ID。
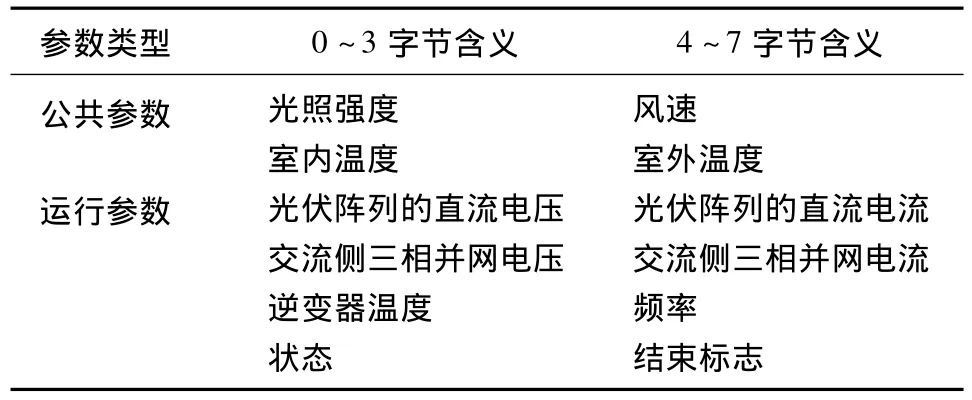
表1 运行参数数据帧定义Tab.1 Definition of the data frame of operational parameters
上位机向下位机发送命令的数据格式为11位标志符+8 B数据,其中,Data0作为控制命令字段,Data7作为数据发送的目标节点ID写入数据,Data1~Data6皆保留使用。当上位机向下位机发送控制命令时,下位机只接收与其ID相符的报文。
4 结束语
在综合研究现场总线技术、DSP技术以及软件编程技术的基础上,设计开发了光伏并网电站智能监控系统;并充分发挥了DSP强大的数据处理能力,提高了系统控制和数据采集的实时性;同时,将CAN总线引入到数据的通信中,提高了系统的可靠性和容错能力,并大幅度地缩短了软件开发周期。此外,该监控系统集多种功能于一体,具有良好的可靠性和可扩展性、人机界面友好等特点,对进一步提高光伏并网电站的效率、自动化水平以及优化电站的实时性和稳定性都具有重要的现实指导意义。
[1]赵争鸣,刘建政,孙晓瑛,等.太阳能光伏发电及其应用[M].北京:科学出版社,2006.
[2]李立伟,王英,包书哲.光伏电站智能监控系统的研制[J].电源技术,2007,31(1):76 -79.
[3]席鑫宁.基于DSP的设备状态监控系统设计[D].太原:中北大学,2009.
[4]徐华.DSP内嵌式CAN控制器的节点设计与应用[J].湖南工程学院学报,2002,12(3):10 -12.
[5]陈育良,许爱强,李文海,等.SN65HVD230型CAN总线收发器的原理及应用[J].国外电子元器件,2005(9):47-50.
[6]刘和平,邓力,江渝,等.DSP原理及电机控制应用—基于TMS320LF240x系列[M].北京:北京航空航天大学出版社,2006.
[7]冯涛,宋胜利,钟江,等.基于.NET的智能监控系统软件设计与开发[J].计算机应用,2008(9):54 -57.
[8]舒杰,彭宏,沈辉,等.光伏系统的远程监控技术与实现[J].华南理工大学学报:自然科学版,2005,33(5):43-46.
[9]刘宏,陈慧玲,庞胜利.光伏并网电站数据采集监测系统[J].可再生能源,2006,129(5):74 -76.
[10]王忠,孙浩钦,易茂祥.基于CAN总线智能建筑监控系统的通信协议设计[J].电子科技,2010,23(7):62 -65.
[11]邹伟,杨平,徐德.基于MCGS组态软件的上位机控制系统设计[J].制造业自动化,2008,30(12):103 -108.
