基于PLC与组态技术的液位控制系统的设计与实现
2012-09-08胡开明葛远香傅志坚
胡开明, 葛远香, 傅志坚
(东华理工大学机械与电子工程学院,江西抚州 344000)
基于PLC与组态技术的液位控制系统的设计与实现
胡开明, 葛远香, 傅志坚
(东华理工大学机械与电子工程学院,江西抚州 344000)
以过程控制实验装置的水箱液位系统为被控对象,PLC作为控制器,电动阀为执行器,在建立液位系统的数学模型的基础上,采用PID控制算法,对其参数进行了整定,构建了系统的MCGS组态环境,并在该环境下进行了调试。调试结果表明,系统运行稳定,超调量为18%,调节时间约为3 min,控制指标达到了工程要求,控制效果良好。
水箱液位;PLC;数学模型;PID算法;MCGS组态
胡开明,葛远香,傅志坚.2012.基于PLC与组态技术的液位控制系统的设计与实现[J].东华理工大学学报:自然科学版,35(3):297-300.
Hu Kai-ming,Ge Yuan-xiang,Fu Zhi-jian.2012.Design and realization of the water level system based on PLC and configuration technology[J].Journal of East China Institute of Technology(Natural Science),35(3):297-300.
工业液体的液位控制系统是工业生产中比较重要的控制应用之一。随着微处理器、自动化仪表和数字通信网络的飞速发展,控制手段也越来越丰富。在现代工业生产中,小型PLC的高可靠性和电动阀快速准确等特点在工业生产中有着广阔的应用前景,组态软件是近几年来在工业自动化领域兴起的一种新型软件开发工具,开发人员不需要编制具体的指令和代码,只要利用组态软件包中的工具,通过硬件组态、数据组态、图形图像组态等即可完成所需应用软件的开发工作,运用工业组态软件对系统进行监控的应用越来越广(马兵智等,2004;胡开明等,2009)。笔者针对单容水箱液位控制系统设计了以PLC为控制器和智能电动阀为执行对象的控制系统,并且通过组态软件对整定过程及曲线进行实时监控运行,直至系统达到最佳控制效果。
1 系统结构
系统以西门子S7-200作为控制器,以电动阀作为执行器,通过控制电动阀的开度来实现管道流量的控制,进而达到控制水箱液位高低的效果。PLC控制器及电动阀与PC机之间采用RS485/232总线进行通信,保证过程控制数据的实时交换。其工作过程为:设定系统给定信号值,扩散硅压力变送器检测到的液位高低值与设定值比较后送入PLC调节器,运算后控制电动阀的开度(李兵等,2006),当液位的高度低于设定值时,电动阀的开度增加,供水量增多,管道流量增大,液位增高;反之开度减小,管道流量减少,液位降低。系统运行过程中自动动态调节,使液位高度最终稳定在设定值。采用恒压磁力泵抽取由水箱流入储水池中的水,循环使用以节约水源。系统现场控制的结构图如图1所示。
2 水箱液位系统建模
设水箱流入量为Q1,改变电动阀的开度可以改变Q1的大小,水箱的流出量为Q2,改变出水阀F4的开度可以改变Q2。液位h的变化反映了Q1与Q2不等而引起水箱中蓄水或泄水的过程。若将Q1作为被控过程的输入变量,h为其输出变量,则该被控过程的数学模型就是h与Q1之间的数学表达式为:

其中R为出水阀的液阻;C为水箱的容量系数。

图1 系统结构图Fig.1 System construction diagram

这样就确定该系统过程数学模型的结构为含纯滞后的一阶惯性环节,也是控制系统中比较典型的结构(胡开明等,2009)。
3 PID控制器
3.1 PID控制器原理及参数整定
系统的结构如图2所示,采用PID控制,PID控制算法是应用最广泛的控制规律之一,在常规控制PID控制系统中,PID控制作用的一般形式为:

式中Kp,KI,KD分别为比例积分微分系数,e(k)为第k次采样时的偏差值,∑e(k)为采样开始到第K次采样时刻之间偏差的累积,Δe(k)为第K次采样时刻输入的偏差与第K-1次采样时刻输入的偏差之差;u(k)为第k次采样时的控制器输出值;T为采样周期(刘金琨,2003)。
3.2 PID控制器的PLC实现
采用西门子S7-200PLC的CPU224作为控制器,同时扩展一片EM235以实现液位模拟量的控制。EM235的模拟量输入模块的AI0通道采集水箱液位信号,经运算处理后送至组态监控界面进行实时显示,同时作为控制策略的输入完成相应调节运算。控制系统外部接线图如图3所示。
控制策略中的PID控制算法由连续控制PID功能块实现,采用指令向导法在PLC中来实现 PID算法。只要在向导的指导下填写相应的参数,就可以方便快捷地完成PID运算的子程序(内含中断程序)。只需要在主程序中调用PID向导生成的子程序,就可以完成PID控制任务(张伟林,2009)。先把AI0输入信号用功能块转换为0~1间的值,送至PID功能块进行相应的运算。其中经输入处理的液位信号(AI0)送至调节器PID的PV-IN端作为测量值,液位的设定值(由组态界面送来)送至PID的SP-INT端,两者偏差进行PID运算。PID的输出进行相应转换后,送至电动阀,改变电动阀的开度,使液位高低稳定在设定值。系统PID控制的梯形图如图4所示。
液位压力变送器反馈流量变量值为VW200内的值;设定值为0.4(8 cm/20 cm);手动/自动控制方式选择I0.0;手动控制输出值为0.3,输出值放在AQ0中。为了保证运行安全,用PLC的主模块设置了流量上下限报警。系统中设置水箱液位为8 cm,高于16 cm或低于4 cm则报警。
4 系统组态调试
采样北京昆仑通态自动化软件科技公司开发的MCGS工业组态监控软件,通过RS232/RS485转换器使PC机与S7-200进行通信。建立组态变量与Step7变量之间的数据交换链接,根据控制策略组态的需要在组态数据词典中定义PLC相连的变量名和类型。完成人机交换界面的设置,液位系统的主控界面、实时曲线及动画效果的监控界面(李兵等,2006;魏金成等,2007)。
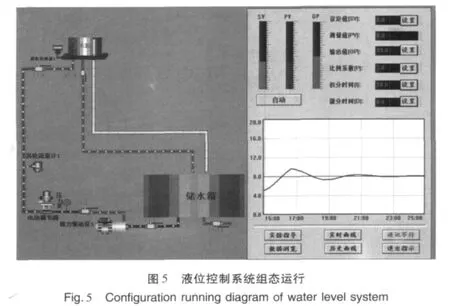
编写应用程序,下载PID控制程序至PLC,运行监控画面。设置参考值,同时调整控制参数,在实时趋势窗口观察液位曲线,直到得到满意的控制效果。系统的组态实时运行状态如图5所示。图5左边部分是液位系统组态运行界面,右上部分是PID各参数及设定值、测量值和输出值和实时状况,右下图为液位输出响应运行的实时曲线。

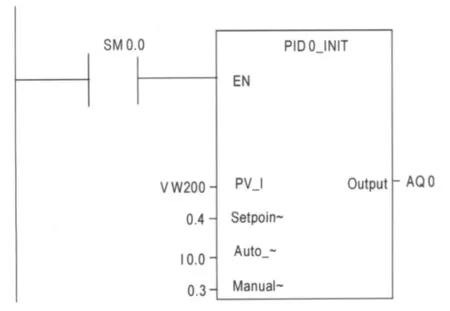
图4 液位系统的PID回路Fig.4 Flow system diagram of PID loo p
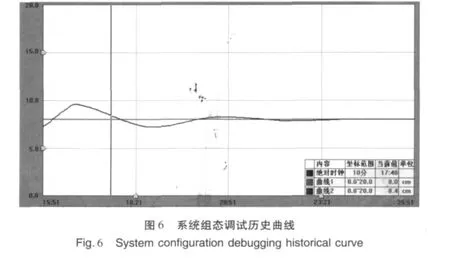
组态技术除了能形象直观地反映系统的变化过程(周焕银等,2009),提供实时数据曲线外,还能显示历史数据曲线,可事后查看数据和状态变化趋势。系统组态调试历史曲线如图6所示,其中固定值直线为管道流量的给定值8 cm,振荡的曲线为液位输出曲线。系统稳定无静差,响应超调量约为18%,调节时间约为3 min,稳态时电动阀的开度为45,控制效果良好。图6给出组态输出图形在某一时刻的相关数据,具有较好的实时性。
5 结语
本系统采用PLC与组态技术对水箱液位系统进行控制,在系统构成上充分体现了PLC小型可靠以及智能电动阀快速准确等特点。采用的MCGS组态软件以其优异的特性在水箱液位监控系统中获得了成功的应用,实现了实时数据浏览、实时和历史数据趋势显示等功能。目前在THJ-2型过程控制系统装置上调试成功,系统运行效果良好,达到了设计的要求。以组态技术为核心液位监控系统具有结构简单、成本低、性能稳定等优点,对提高工业水箱液位的微机化自动控制,具有一定的参考价值,值得推广和应用。
胡开明,李跃忠,钱敏.2009.基于模糊PID与组态技术的液位控制系统的研究[J].机床与液压,9(37):150-152.
李兵,方敏,汪洪波.2006.模糊PID液位控制系统的设计与实现[J].合肥工业大学学报:自然科学版,29(11):1370-1372.
刘金琨.2003.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社.
马兵智,孙志毅,赵志诚,等.2004.组态软件MCGS在锅炉液位控制中的应用[J].控制工程,1(11):84-86.
魏金成,白申义.2007.MCGS开发的液位控制的上位机监控[J].工业控制计算机,12(20):47-48.
张伟林.2009.电气控制与PLC综合应用技术[M].北京:人民邮电出版社.
周焕银,刘金生,钱敏,等2009.《微型计算机控制技术》课程教学方法的研究与探索[J].东华理工大学学报:社会科学版,3(28):270-273.
Design and Realization of the Water Level System based on PLC and Configuration Technology
HU Kai-ming, GE Yuan-xiang, FU Zhi-jian
(Faculty of Mechanical and Electronics Engineering,East China Institute of Technology,Fuzhou,JX 344000,China)
The process control experimental system takes the water level as the controlled object.In this system PLC is adopted as a controller and the electric valve for the actuator.Based on the water level system in the establishment of the mathematical model,the system uses PID algorithm,the PID parameters are tuning,MCGS configuration environment is built and debugs in the environment.Experiments show that the system is running smoothly,the overshoot is 18%,the setting time is about 3 min.The control indicators have reached the engineering requirements and the control effect is good.
water level;PLC;mathematical model;PID algorithm;MCGS configuration
TP272
A
1674-3504(2012)03-0297-04
10.3969/j.issn.1674-3504.2012.03.016
2011-08-23 责任编辑:吴志猛
江西省自然基金项目(2008GZS0043);东华理工大学校长基金项目(DHXK0839)
胡开明(1977—),男,讲师,硕士,主要从事控制理论、检测与控制仪表装置领域的教学与研究工作。
